图
以下笔记为jjyaoao本人制作,欢迎借鉴学习和提出相关建议,转载需要标明出处www.jjyaoao.space
图
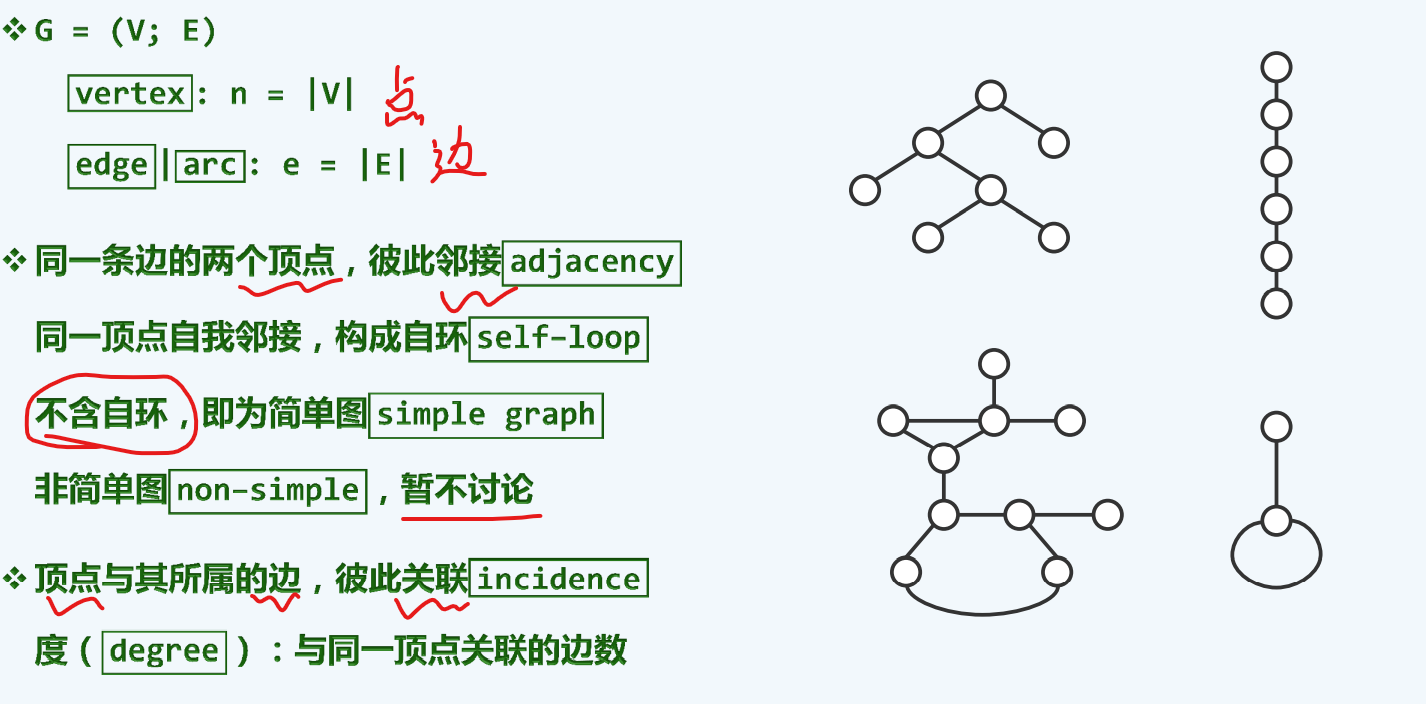
概述
邻接+关联
此课程不讨论自环
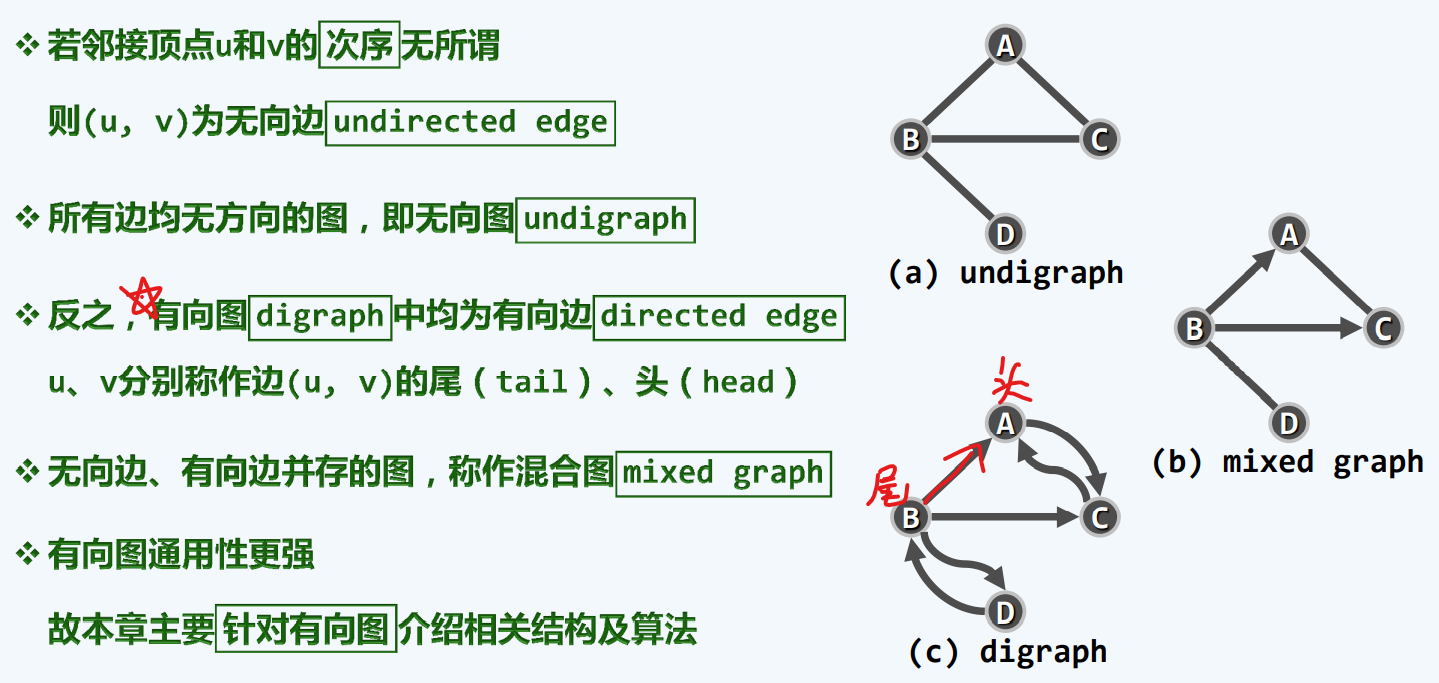
无向+有向
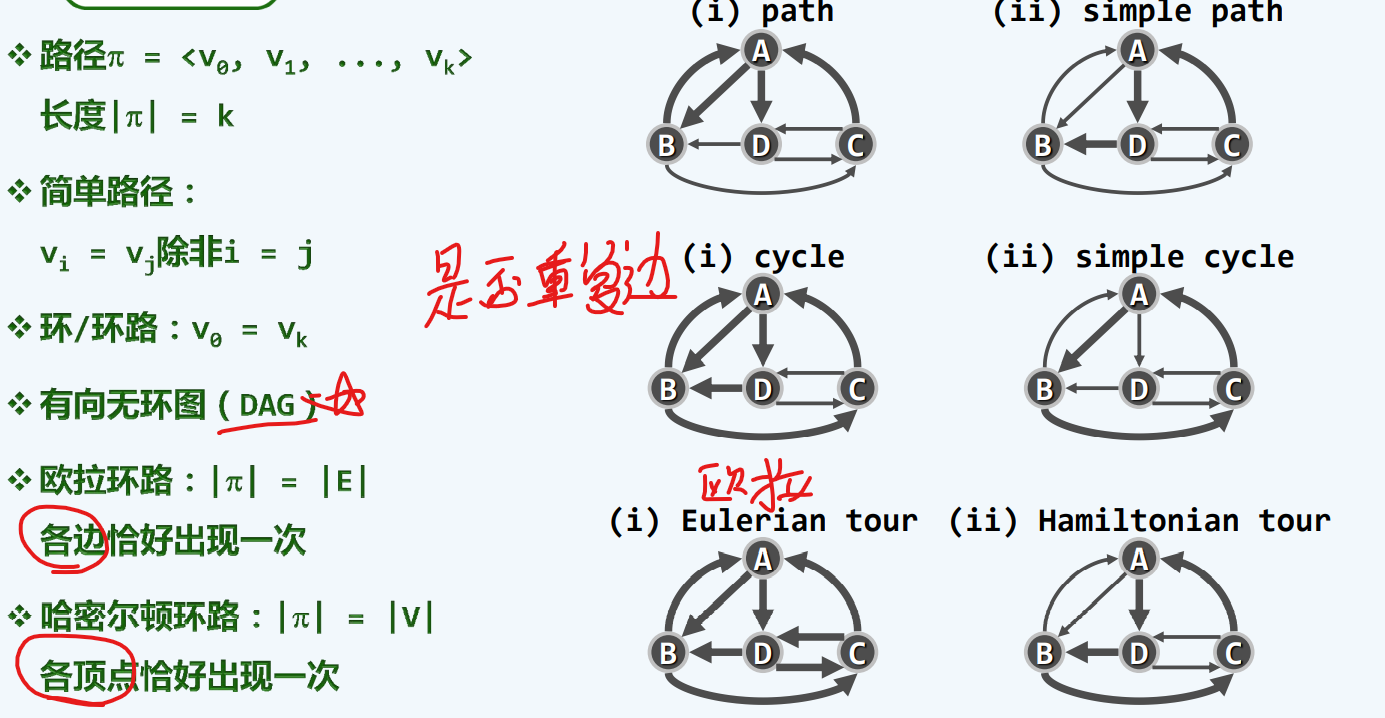
路径+环路
欧拉环路,所有的边可以拉通走一遍(恰好一次)
哈密尔顿环路,每一个顶点可以拉通走一次(恰好一次)
环:一条只有第一个和最后一个顶点重复的非空路径
邻接矩阵
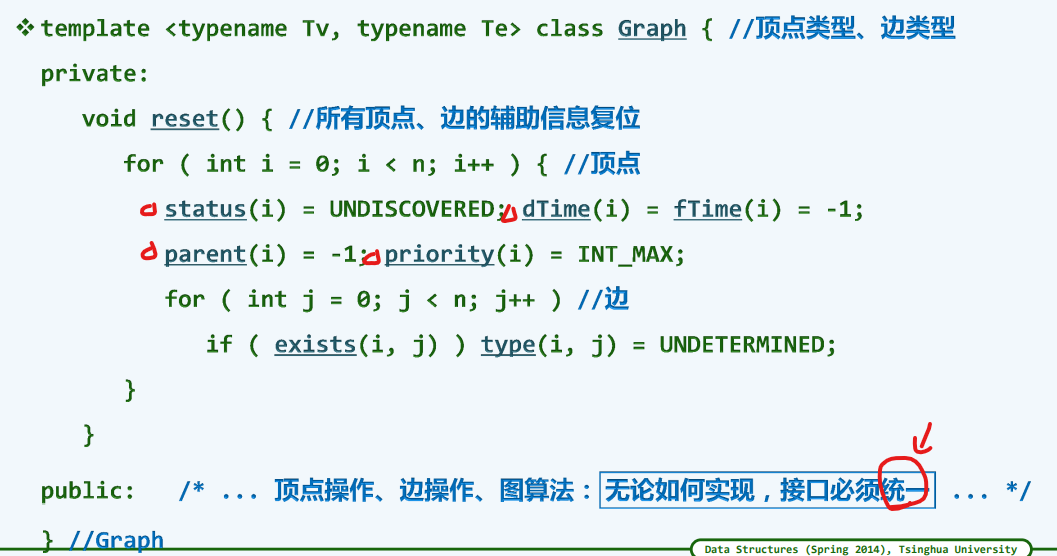
接口
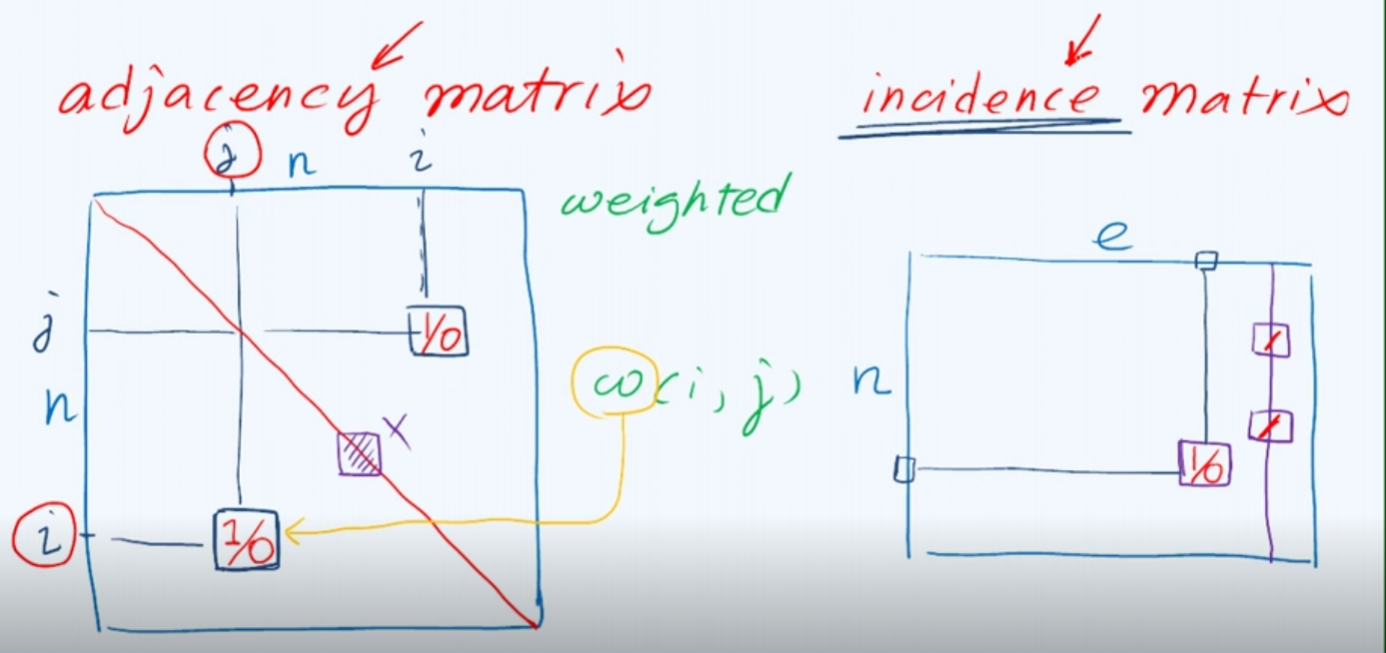
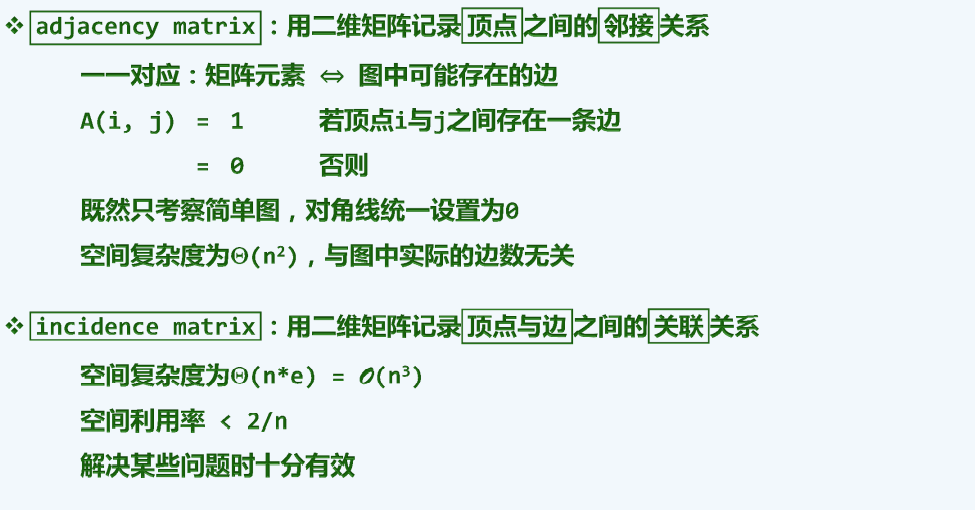
邻接矩阵和关联矩阵
在这堂课中,使用邻接矩阵来描述(尽管有些时候关联矩阵同样可以大显身手)
实例
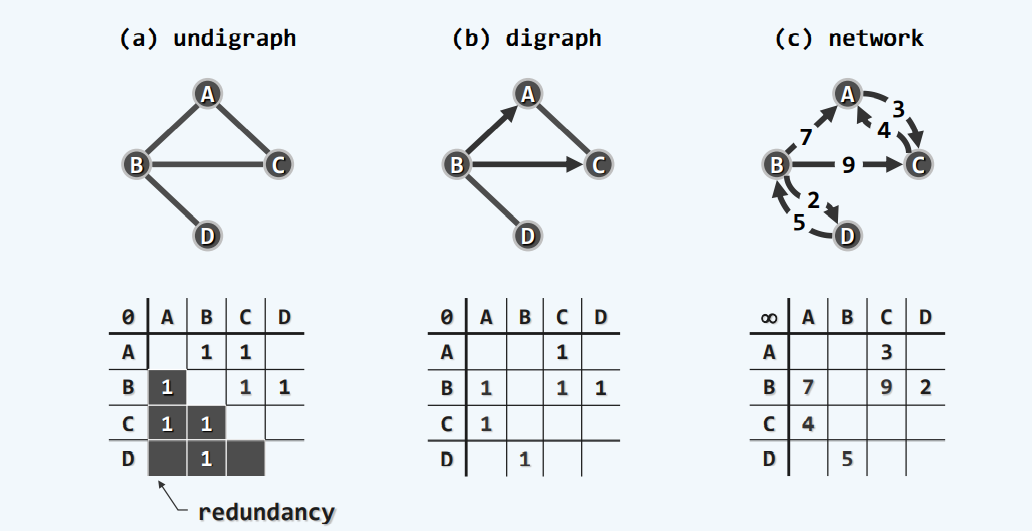
邻接矩阵在无向图,有向图,带权图中的表现形式
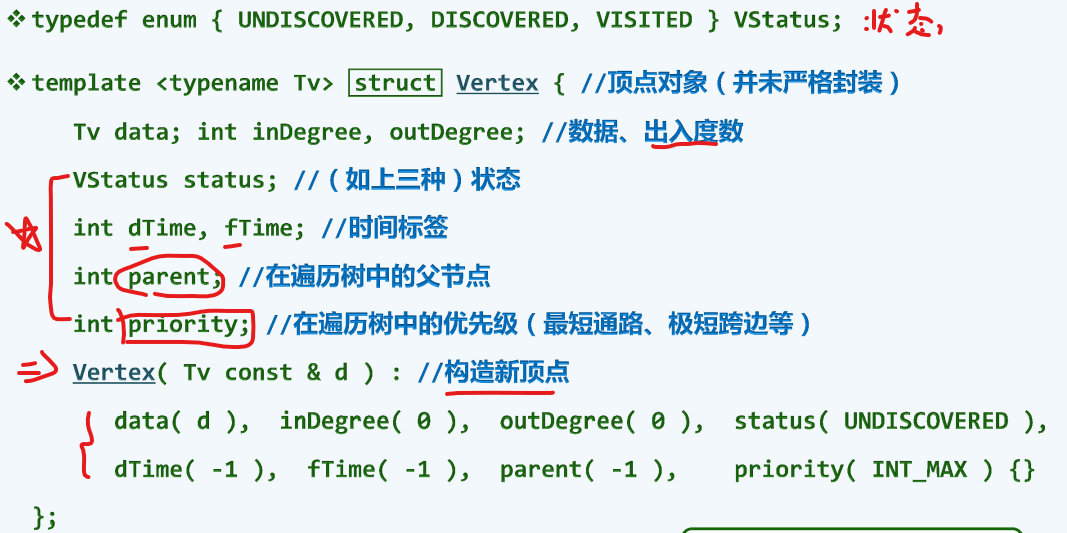
顶点和边
顶点
五角星部分后续遍历时详细介绍
入度,出度,也就是当前顶点和多少个别的顶点相互关联
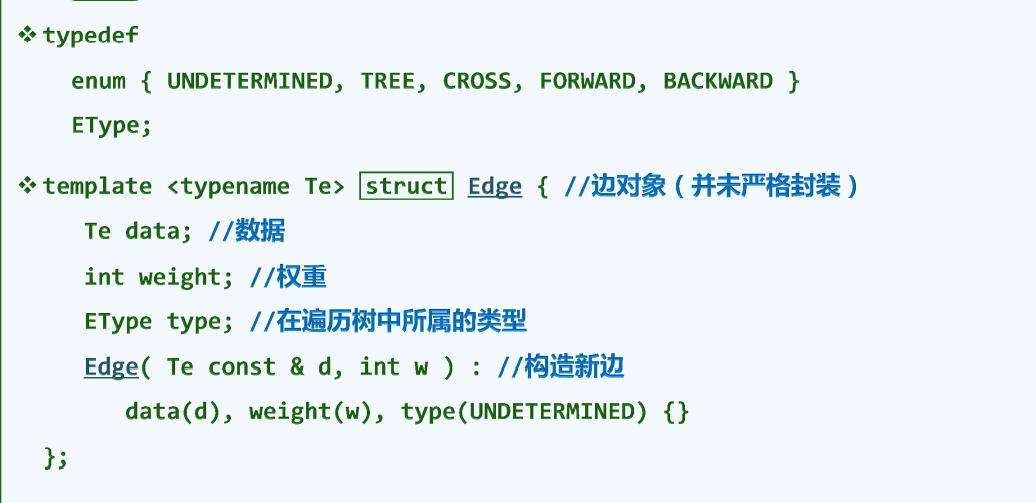
边
边需要有data记录自己携带的信息,对于带权网络,还需要记录权重,并且边也有含义,为了创建一条边,我们也需对相应的各项进行初始化设置即可
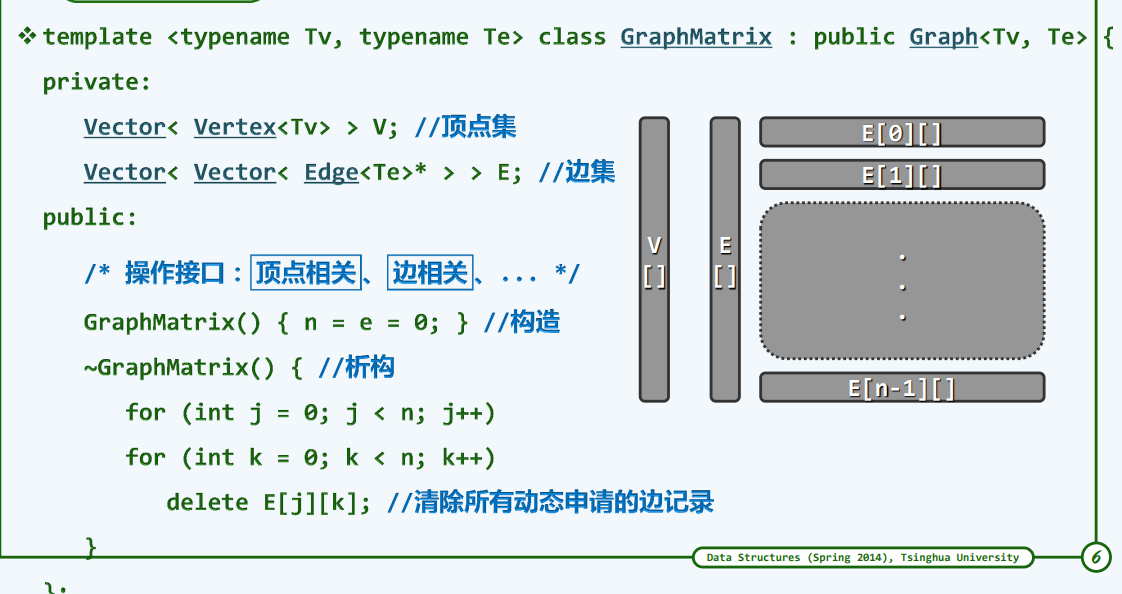
实现图(邻接矩阵)
顶点集:由一组顶点所构成的向量
边集:由一组边所构成的向量,进而由这一组向量所构成的向量
每个顶点,最多可能与n条边相关,所以每个向量的长度也是n
总共可能就n个向量(每一个向量是E[0] [ ]) —-这n个向量构成一个边集
0是第0个顶点,后面是与他关联的边的个数,每个顶点可能与n个向量相关联,所以这个n个向量的每一个向量的长度也是n
邻接表实现
(20条消息) 数据结构之图(邻接表实现)(C++)_碣石观海的博客-CSDN博客_c++邻接表
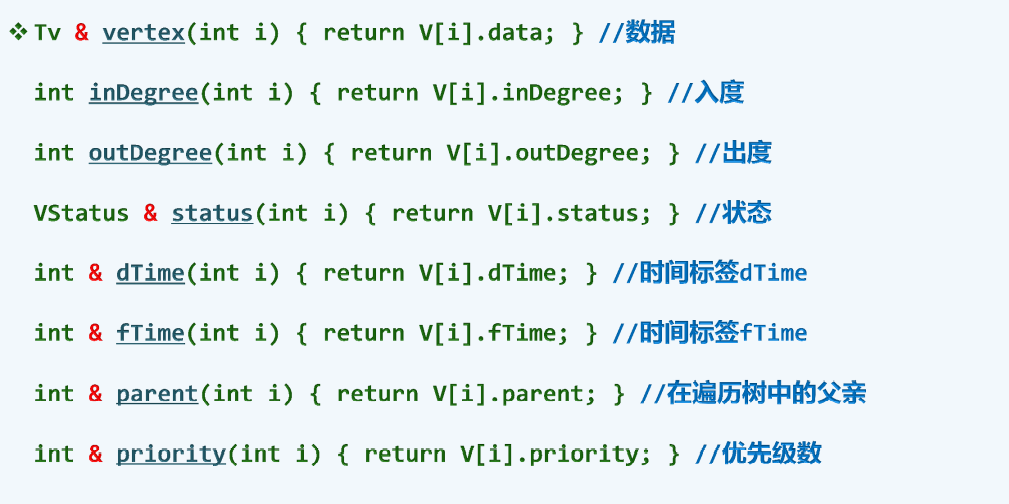
顶点
顶点静态操作
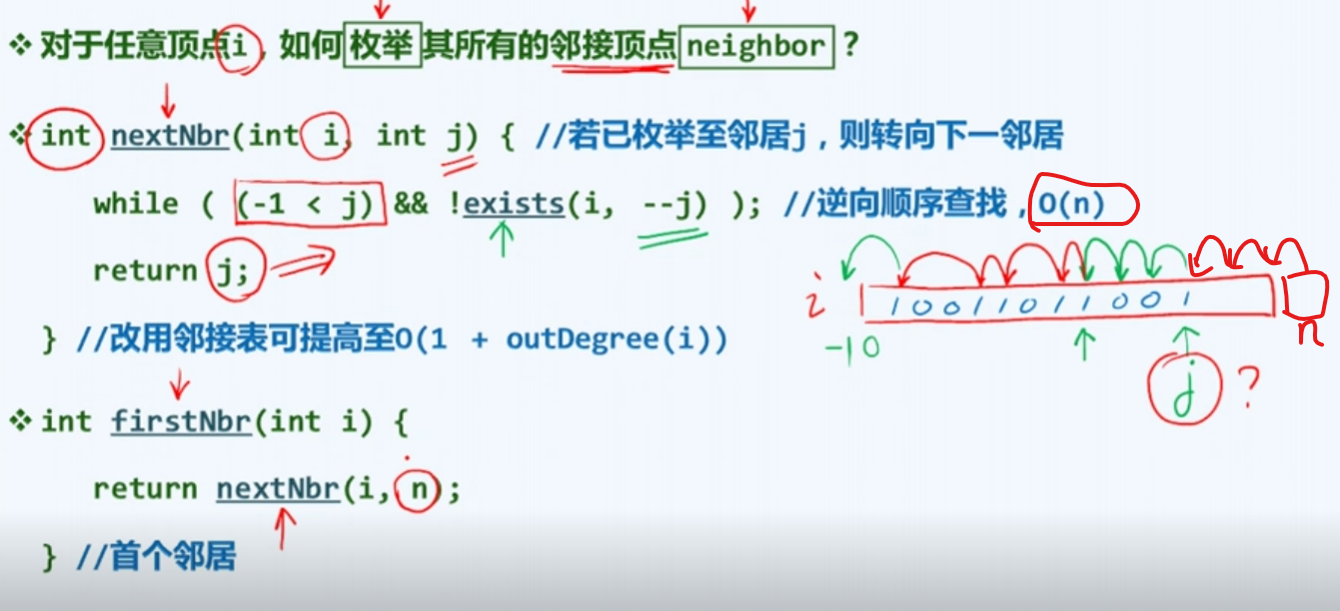
一系列基本操作:
定义一个n,尽管它并不存在:n是一个假象的哨兵,并且和i里的任何顶点都相邻
我们可以看到整个算法的复杂度最多是O(n),我们也可以使用邻接表进行改进,将会看到时间是线性正比于当前顶点的出度
顶点动态操作
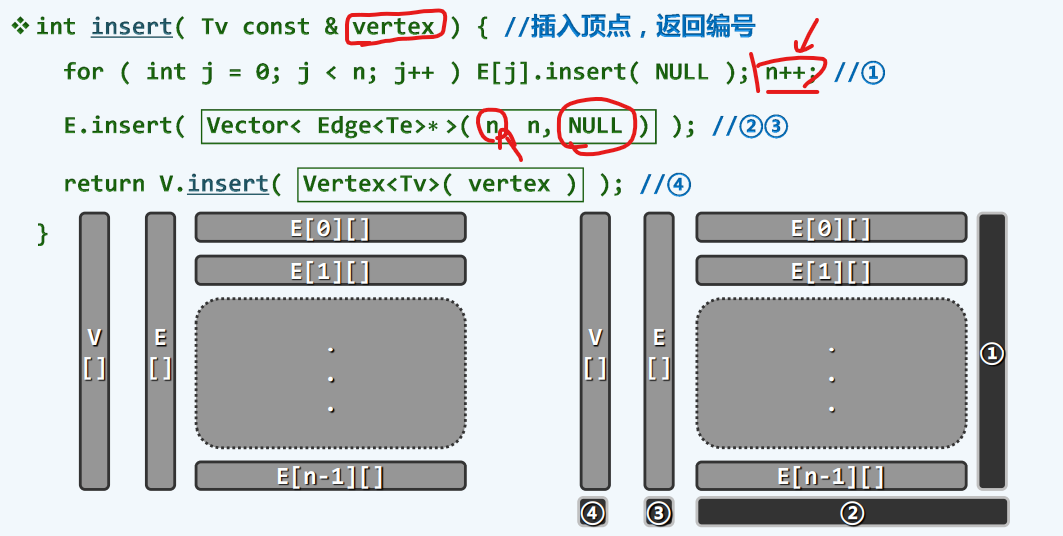
顶点插入
①每个行向量的尾部各自延长一个单位
②③我们需要生成一个行向量,行向量的元素都是一系列的边记录,它的总数是n,其中所有边引用都初始化为空
注意:在第一步延长了每一个行向量之后,曾经随手将n++了,因此,我们生成了新的行向量会在原来的基础上增加一个单位,总而言之,我们能生成一个长度为新的n的行向量
接下来呢,我们还要取出行向量的地址并将他存到E[] (第一级) 的链表中,而这一步是由在第一级的链表中调用insert来实现的
④最终,我们创造一个对应的顶点记录,并且存入于整个的顶点向量(V[])之中,才整体完成了新顶点的引入,尽管于其他的顶点还没有任何的连边
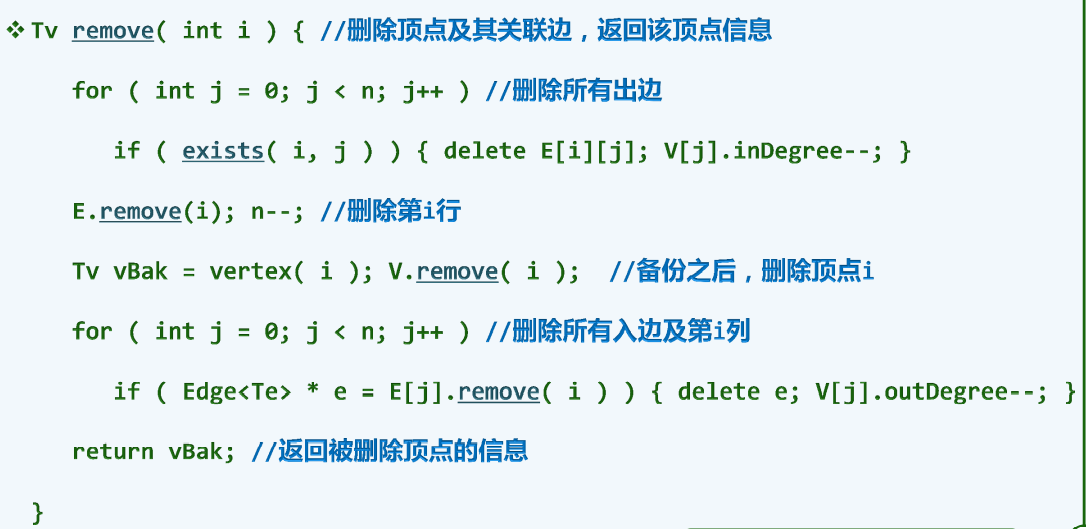
顶点删除
也就是插入的逆过程
边操作
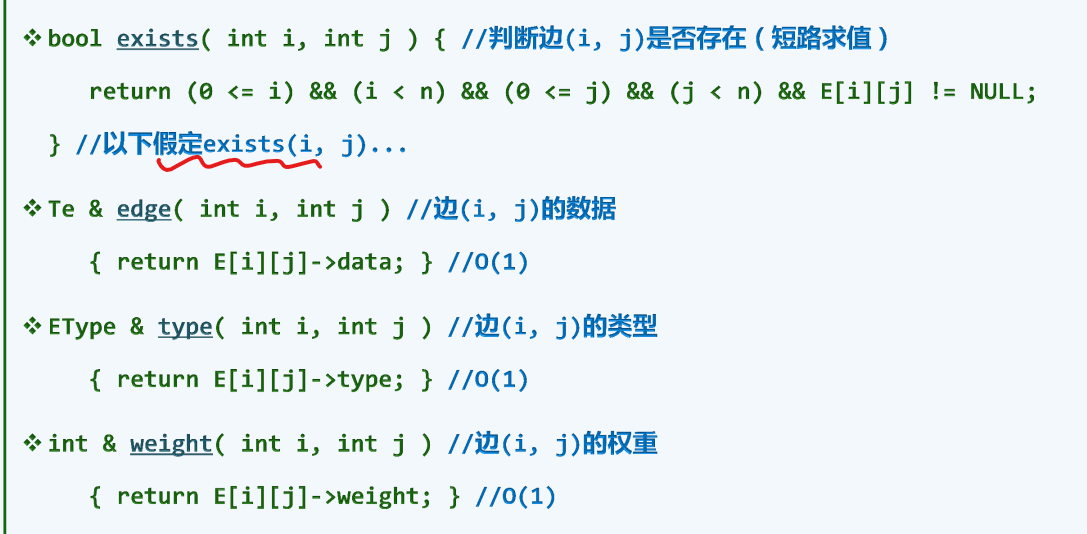
边存在
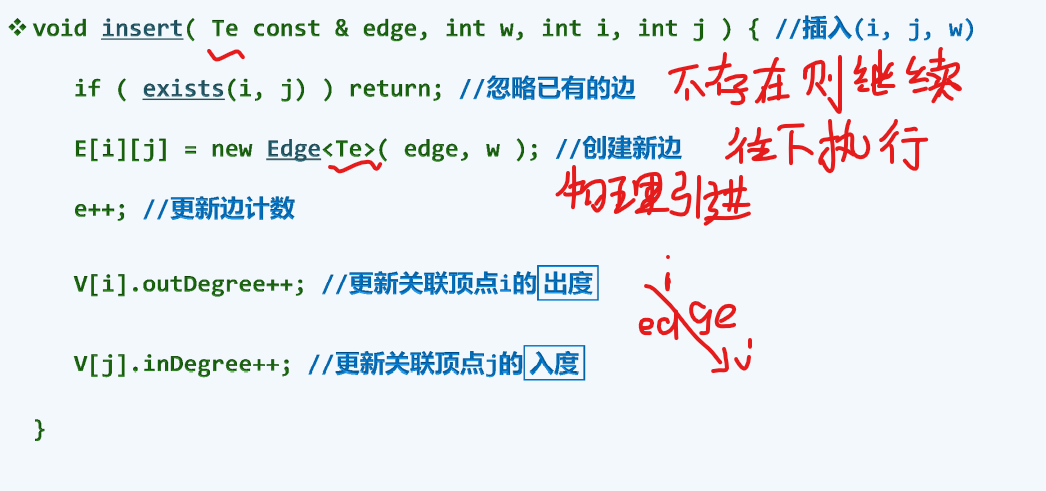
边插入
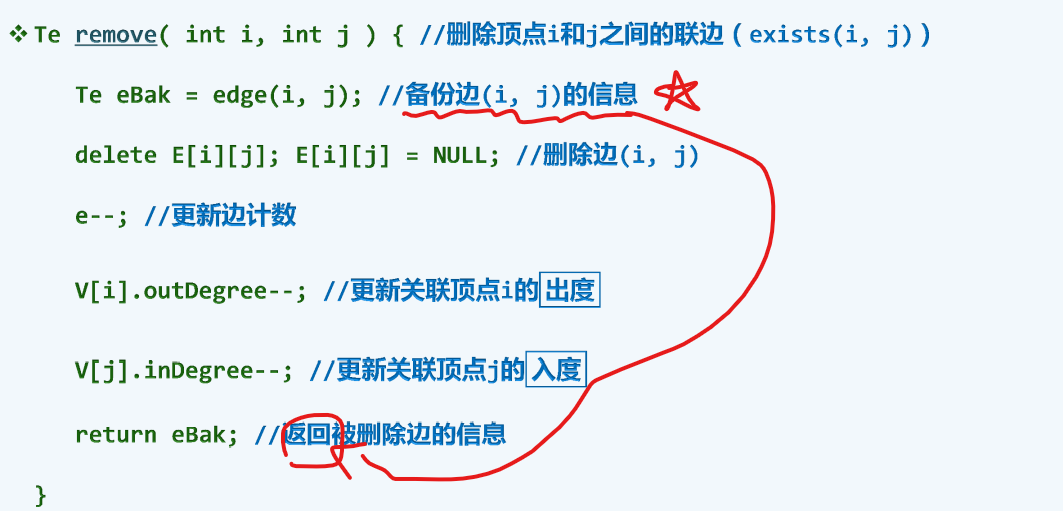
边删除
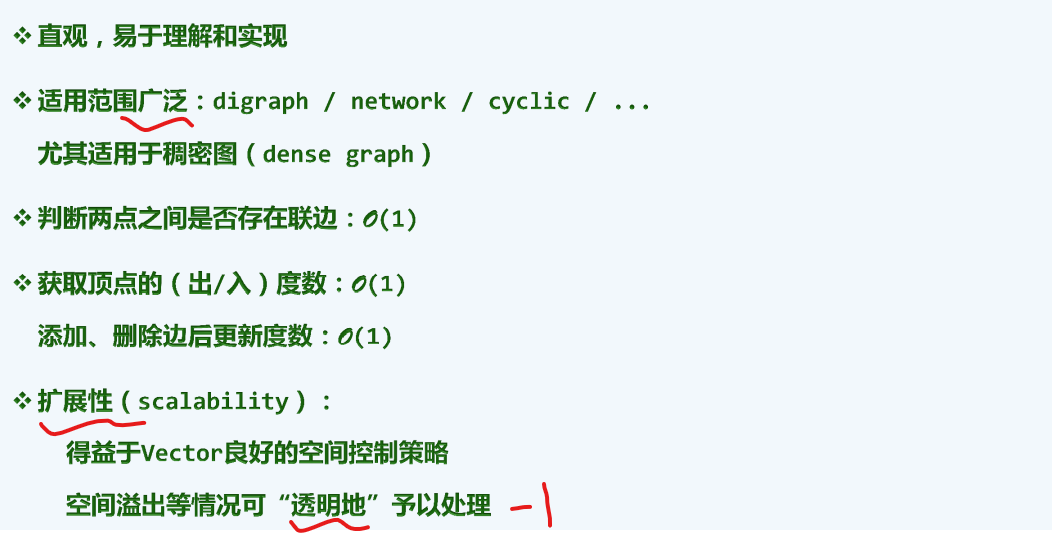
概括和总结
优点
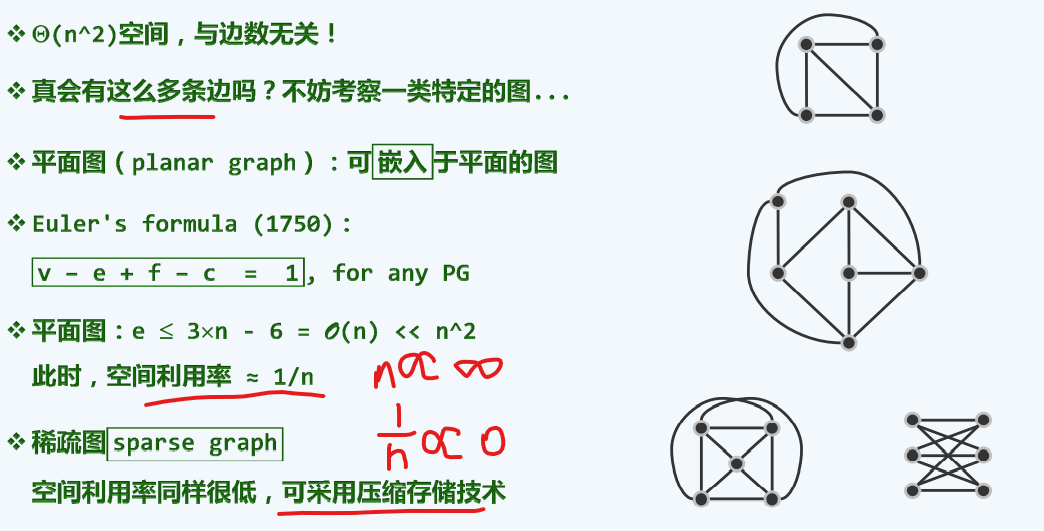
缺点
广度优先搜索(BFS)
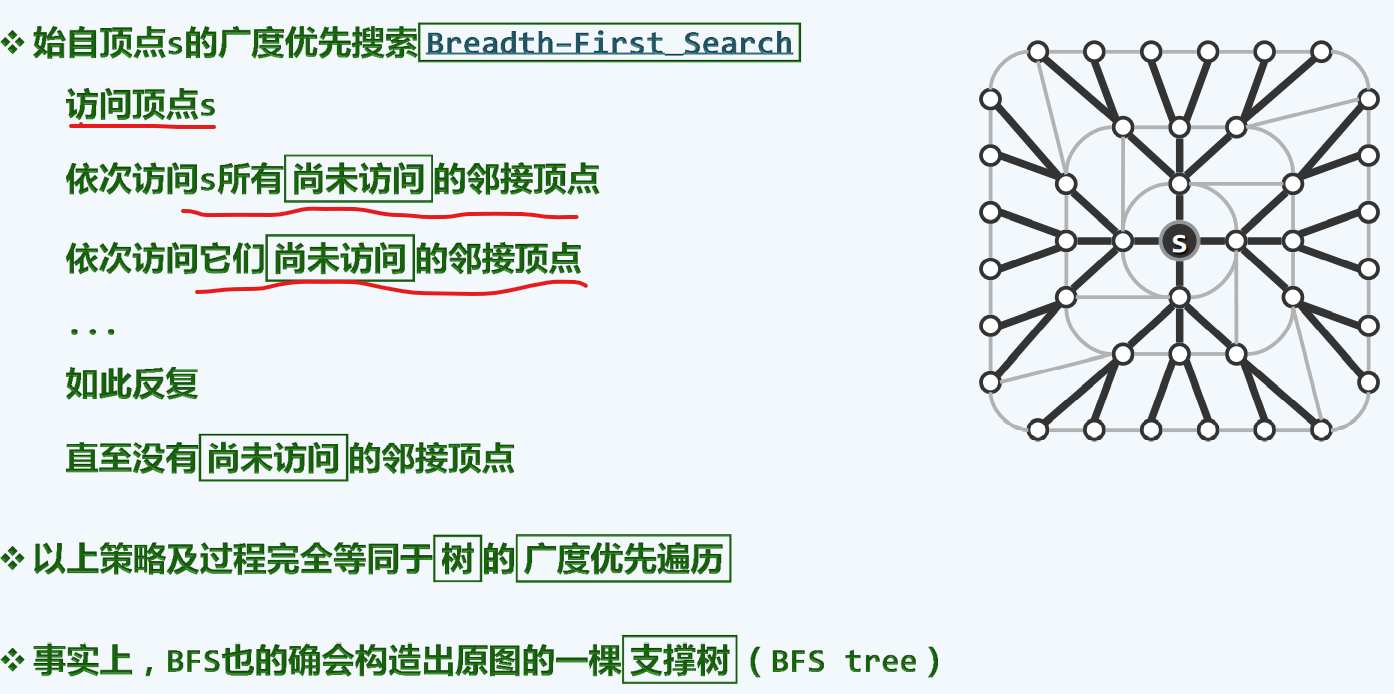
策略
图的广度优先可以视为树的层次遍历的推广
实现
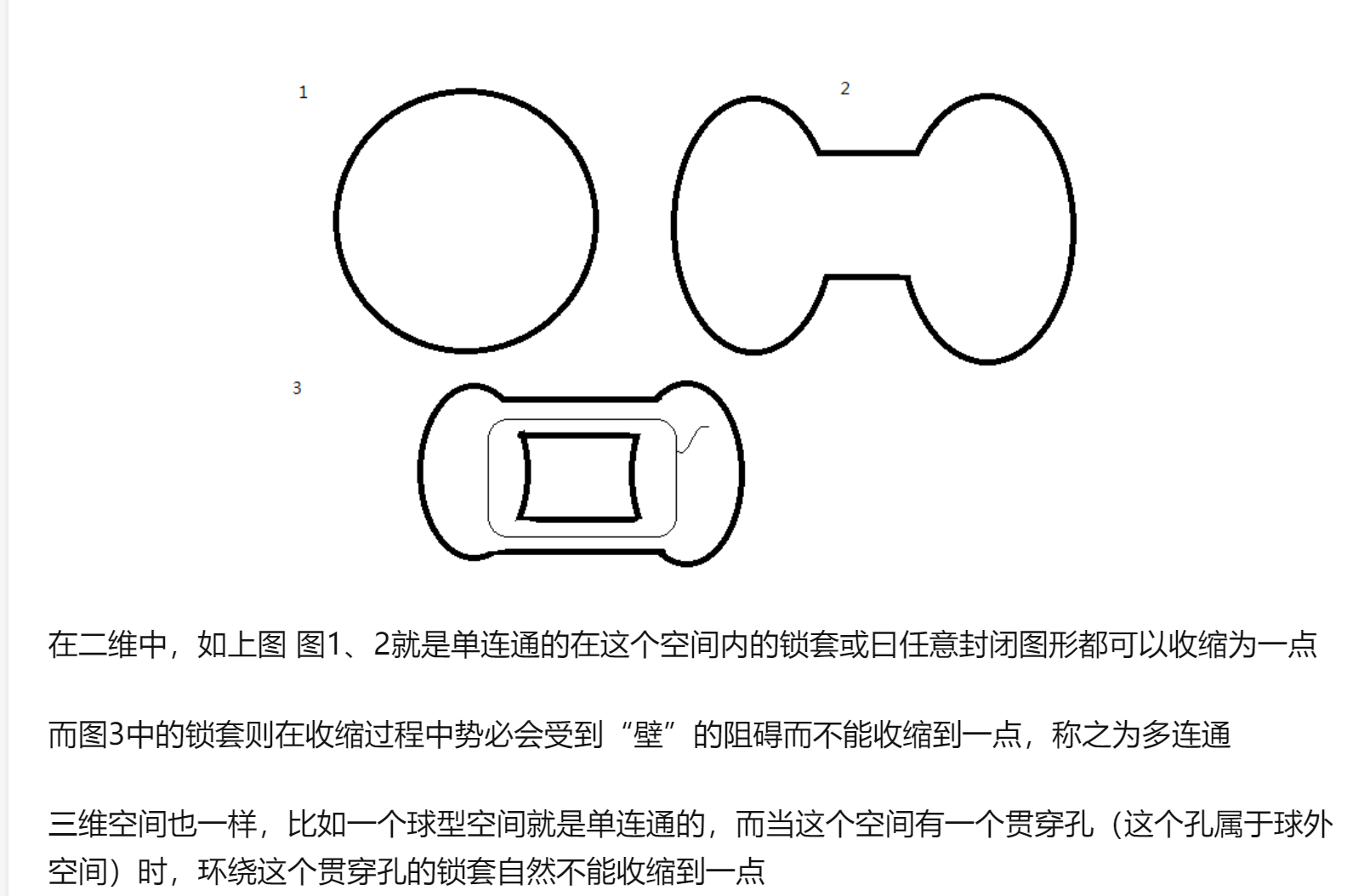
单连通
单连通:设D是一区域,若属于D内任一简单闭曲线的内部都属于D,则称D为单连通区域,单连通区域也可以这样描述:D内任一封闭曲线所围成的区域内只含有D中的点。更通俗地说,单连通区域是没有“洞”的区域。
树边:上图策略中的黑色实心边
跨边:虚线部分边,用不上,不是真正组成树的边
1 | template <typename Tv, typename Te> //广度优先搜索BFS算法(单个连通域) |
多连通
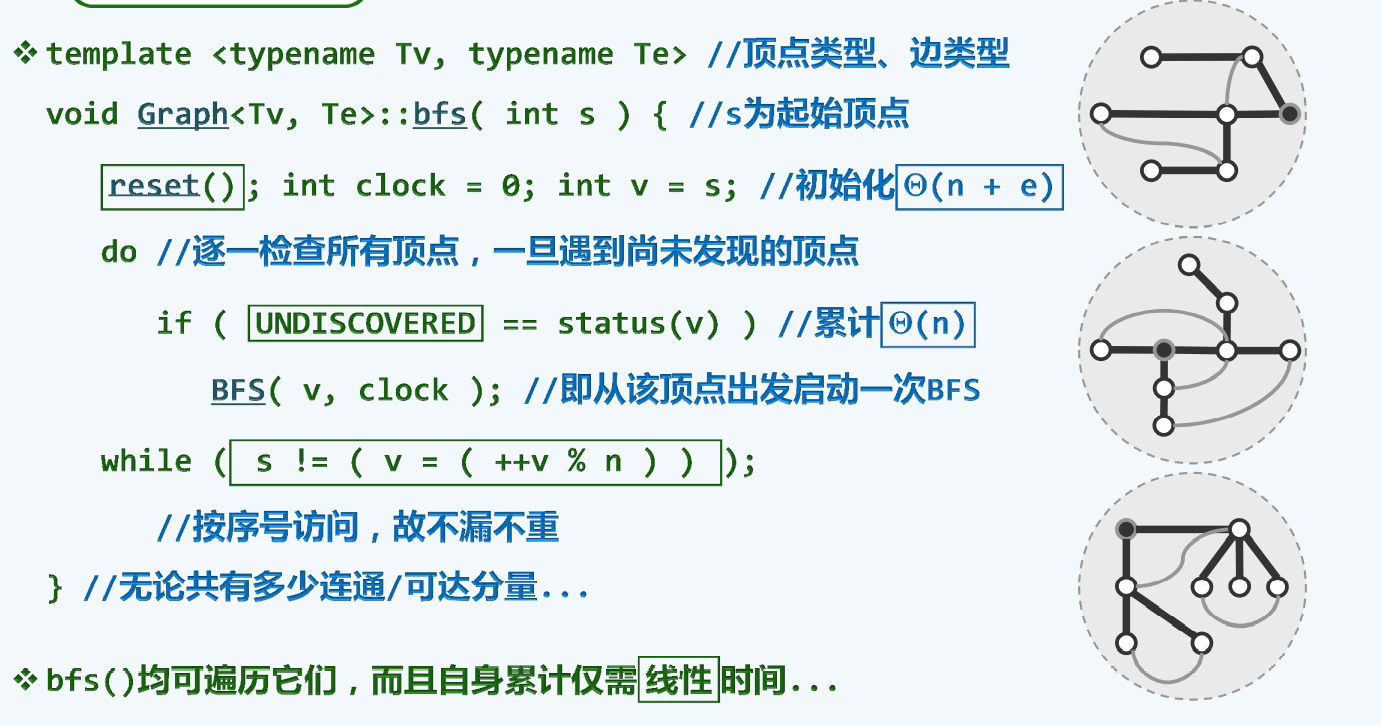
1 | template <typename Tv, typename Te> //广度优先搜索BFS算法(全图) |
这样,就可以把每一个顶点开始的来访问一次,看看是否有undiscovered,这样,可能会引起我们的担心,毕竟循环好像是线性次,然而,我们说不必要担心,因为必须经过当前if判断后,才可能启动一次bfs搜索,这种处理方式可以保证,每一个连通域启动,而且只启动一次,所以花费在搜索上的时间只是对全图的一次遍历,而不是多次
小bfs套上面单连通的大bfs
实例
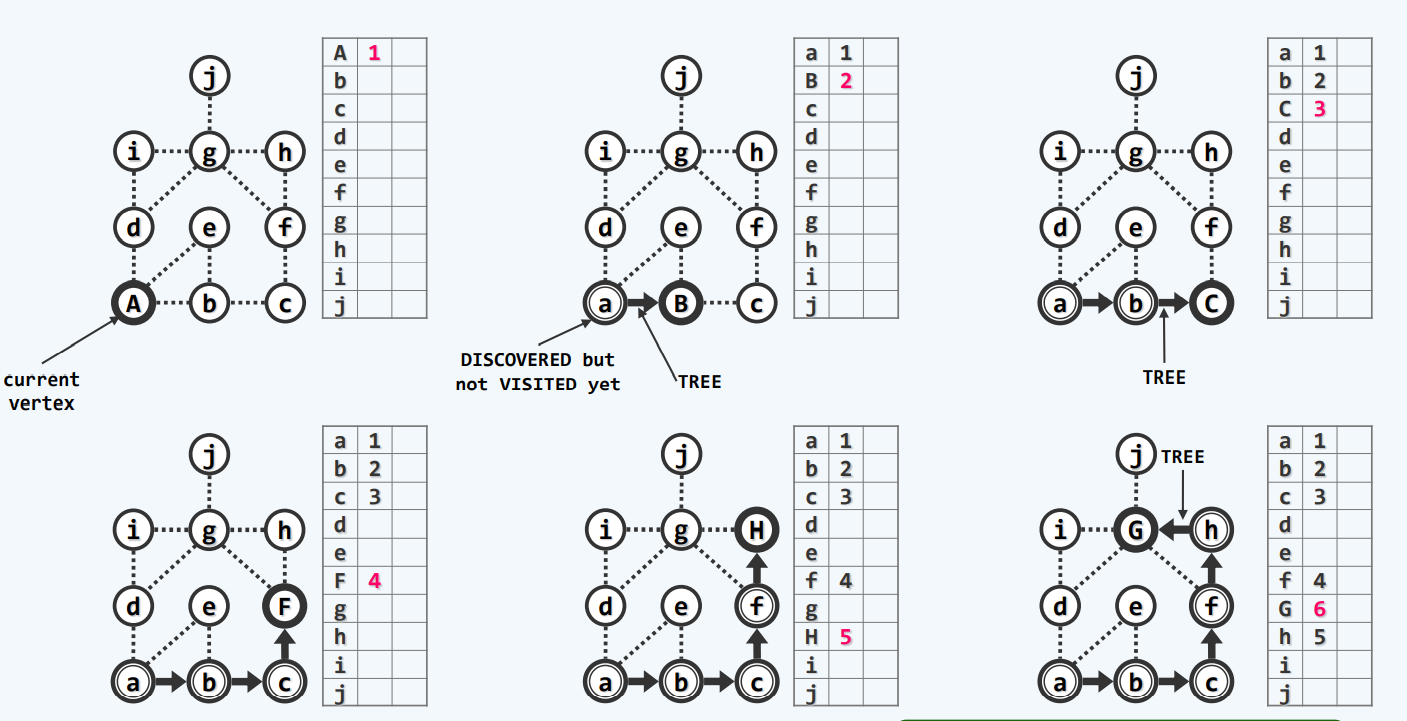
空心圆为未发现,实心圆为已发现,双重实心为已经访问
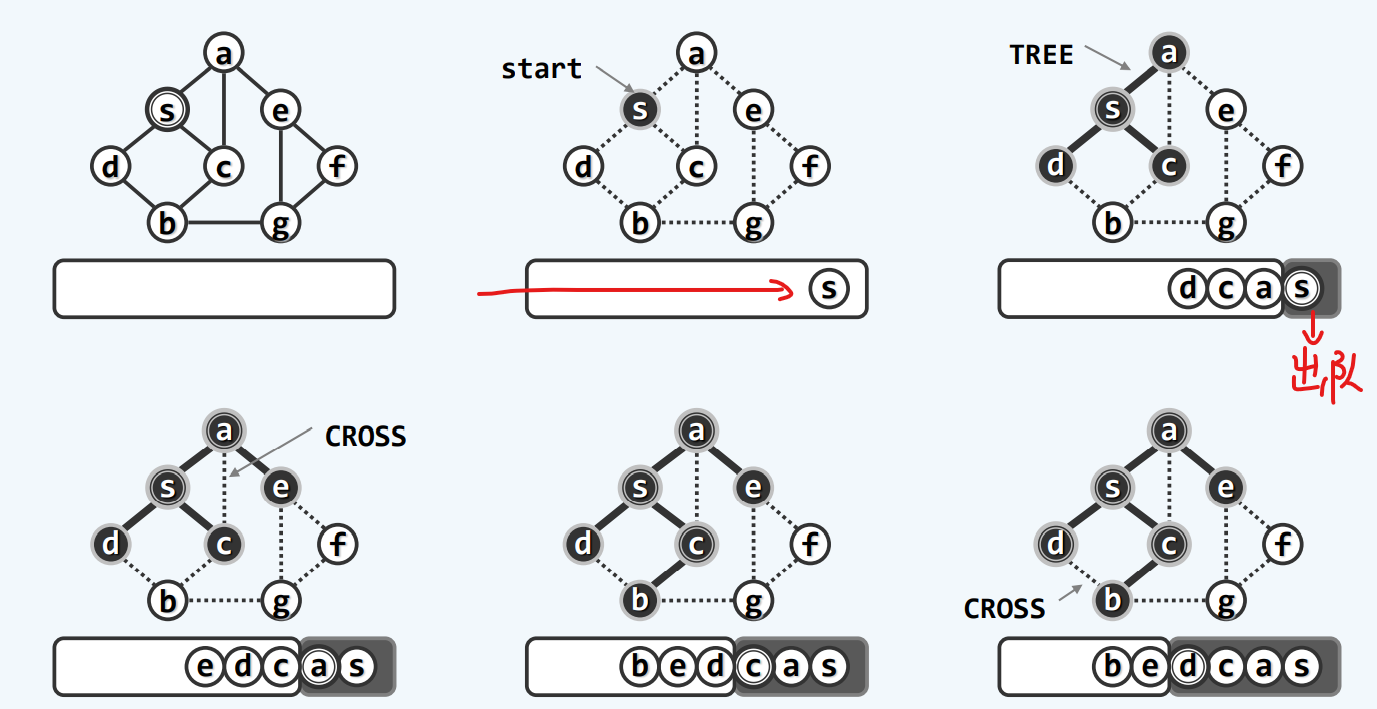
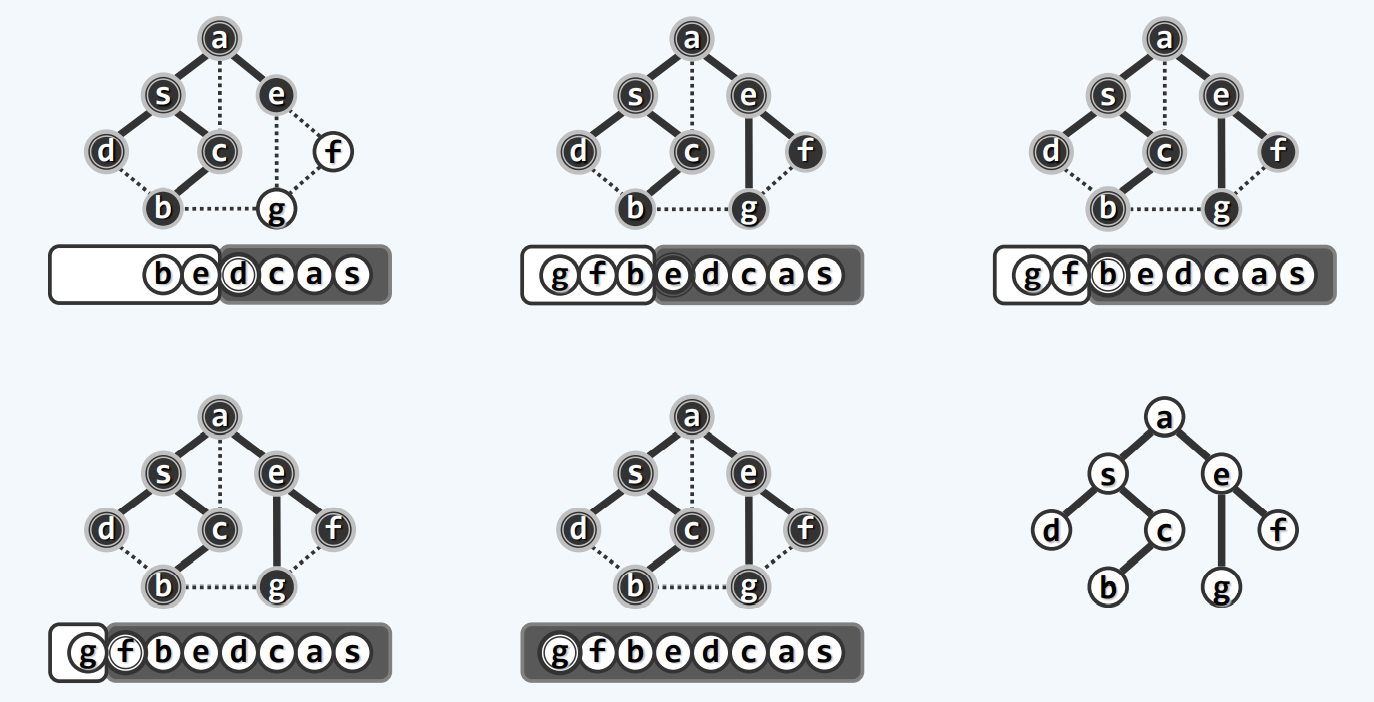
最终得到遍历支撑树。
复杂度
对于while循环而言,外框架需要O(n)次
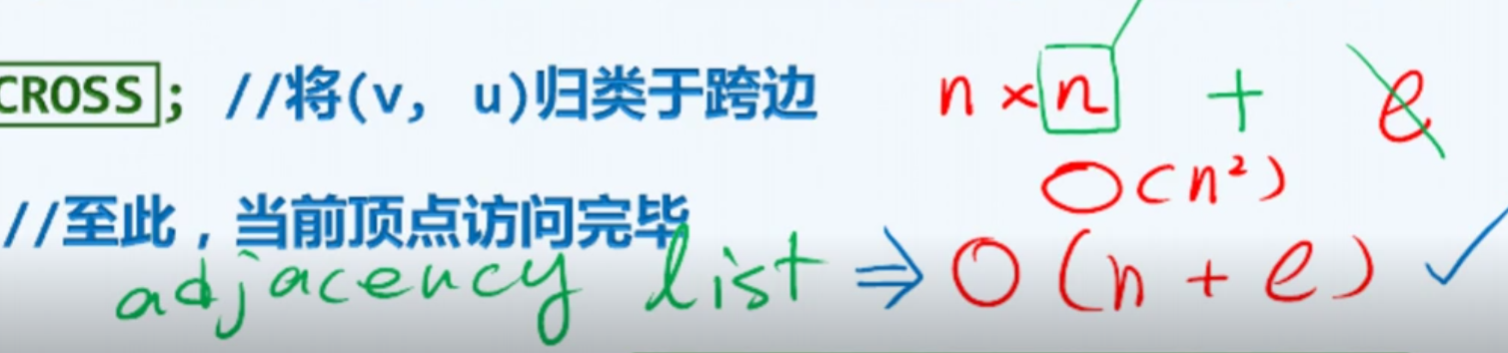
对于for循环而言,需要回顾他的实现机制,其实就是对顶点v的行向量进行一次线性的扫描(自后向前),所以于while叠加,我们需要n*n 但是,我们真正取出,只有e次(边的个数),按理应该是O(n²)
但,这只具有理论上的意义,实际情况,因为我们的操作简单,再加上cache高速缓冲,因此,我们完全可以得出真正
我们说,这已经不能是更好的了(bfs,dfs只是基本的别的算法的实现框架
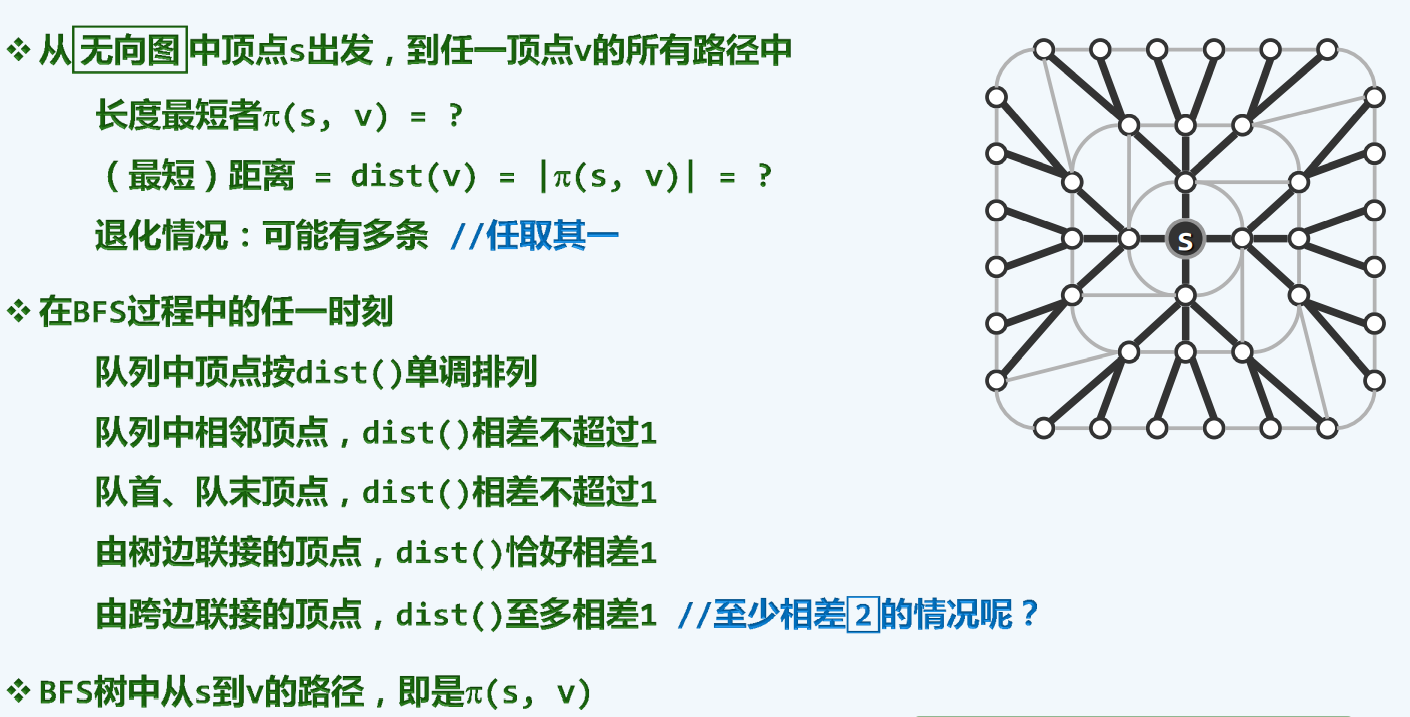
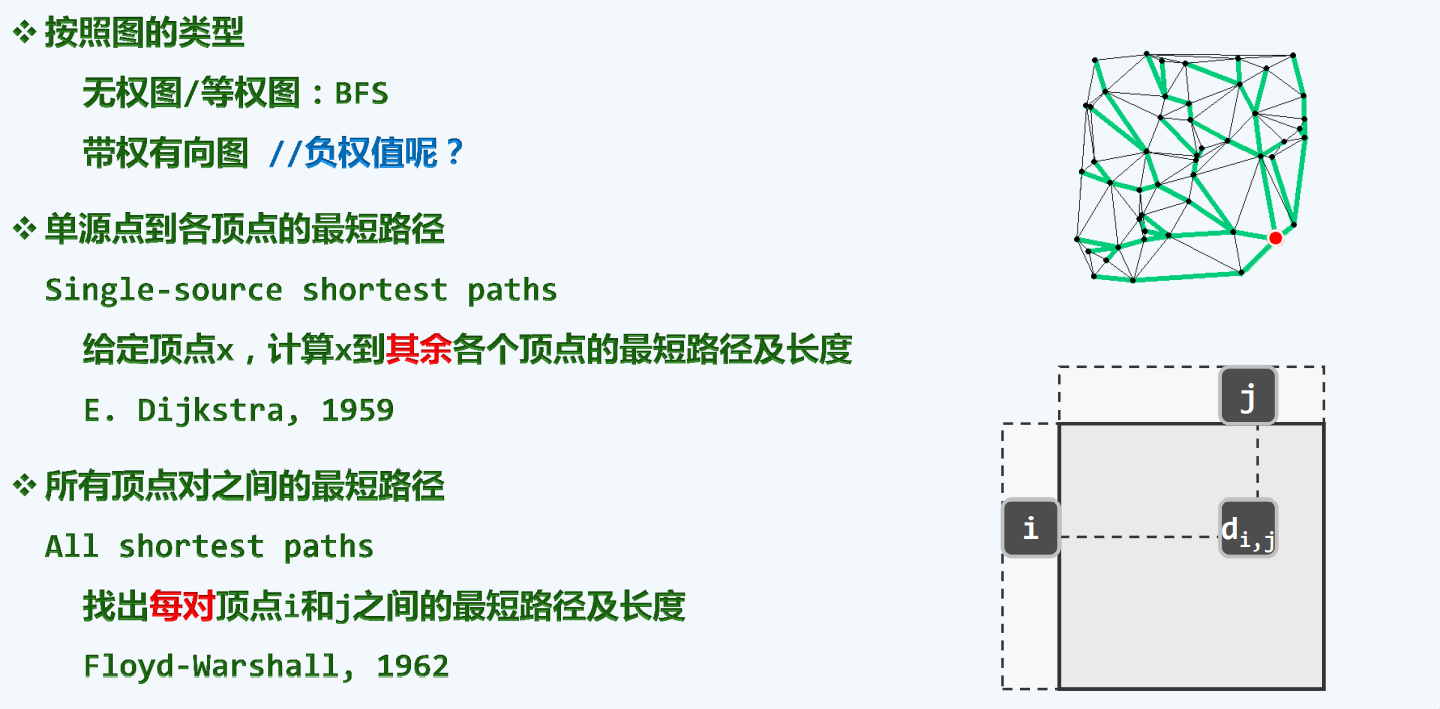
最短路径
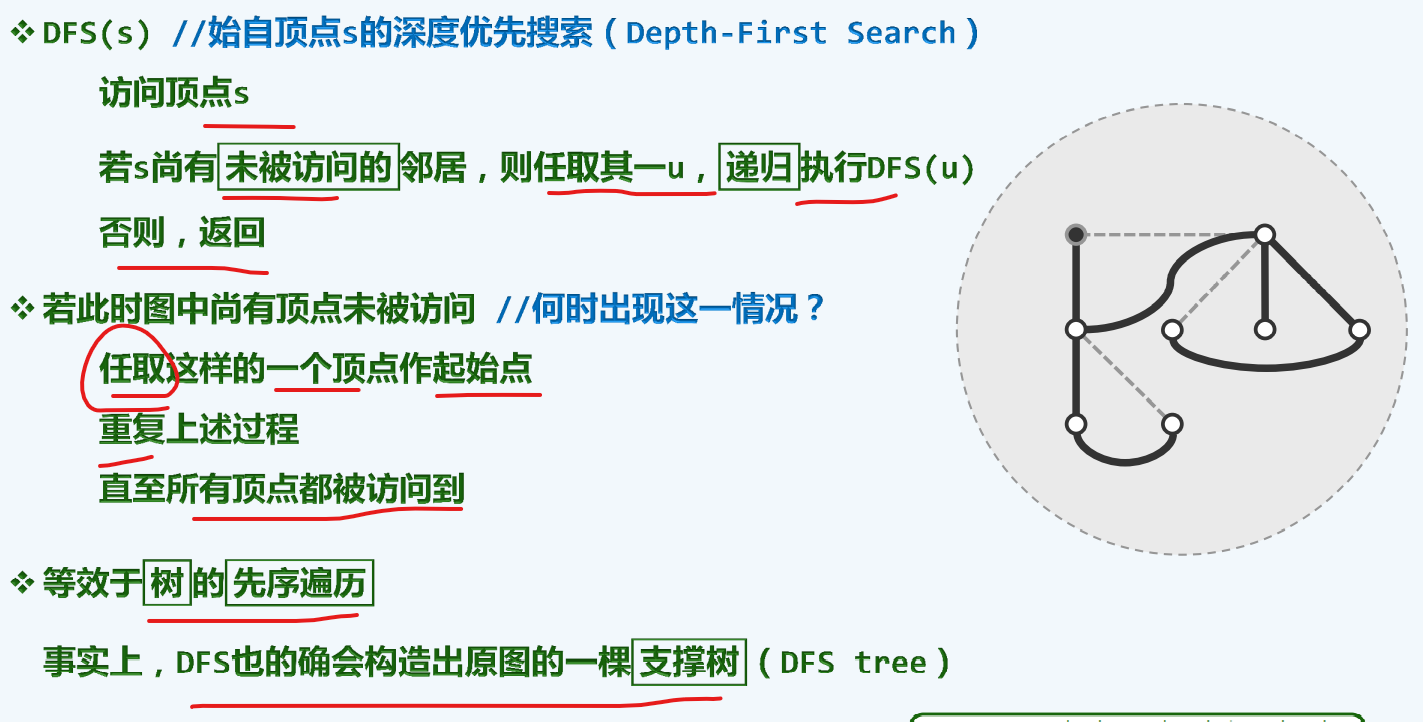
深度优先搜索(DFS)
算法
实现
1 | template <typename Tv, typename Te> //深度优先搜索DFS算法(单个连通域) |
多连通
1 | template <typename Tv, typename Te> //深度优先搜索DFS算法(全图) |
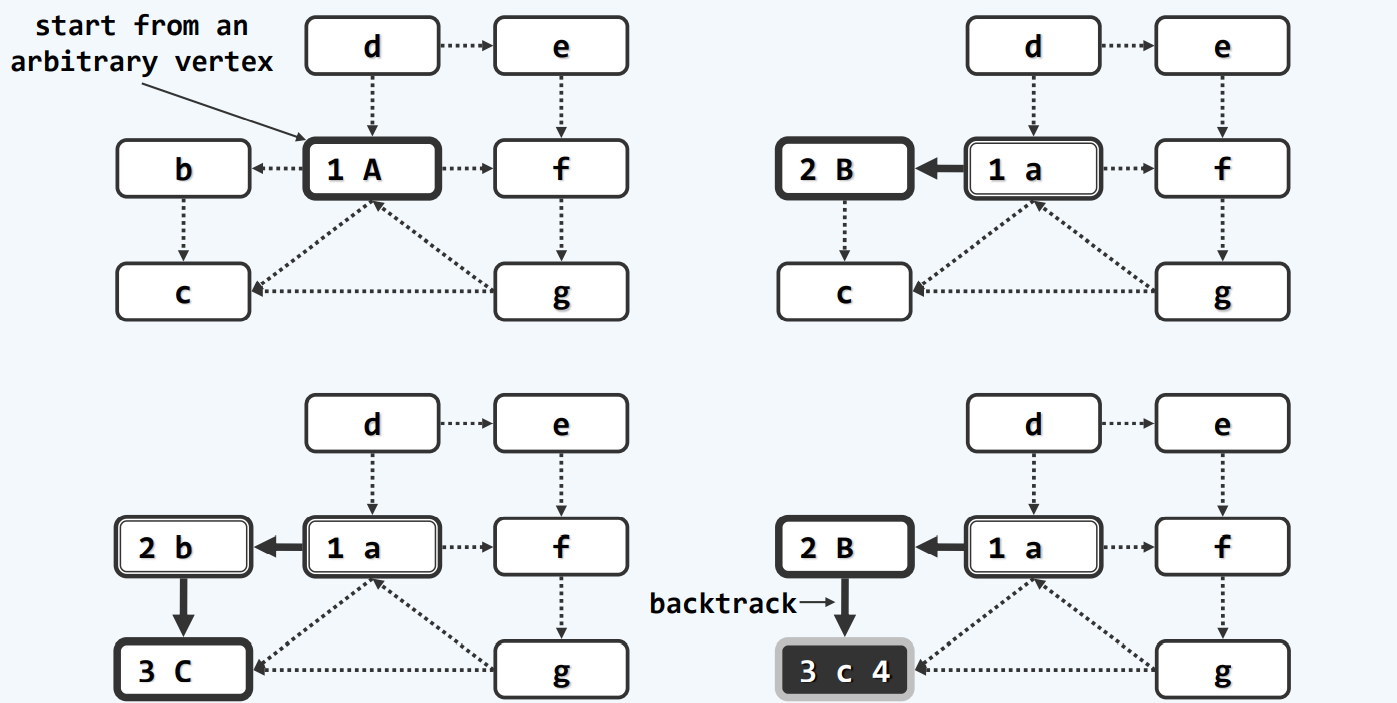
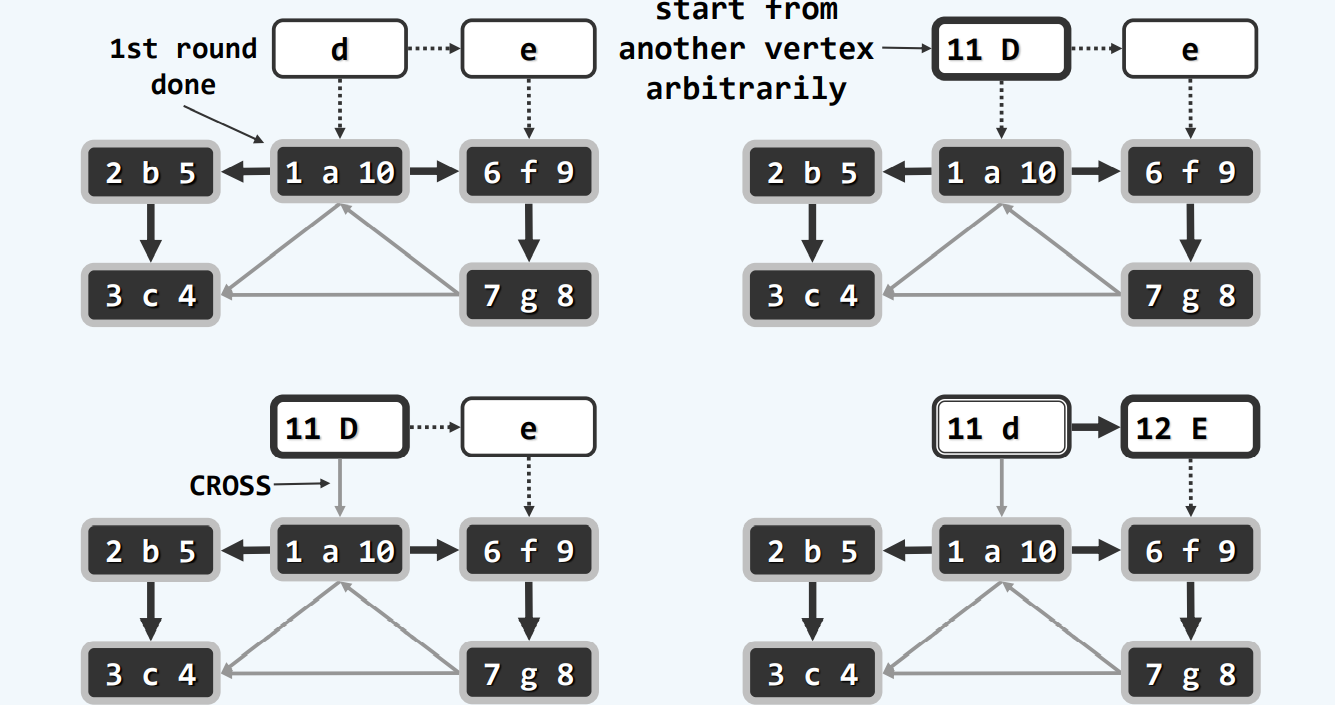
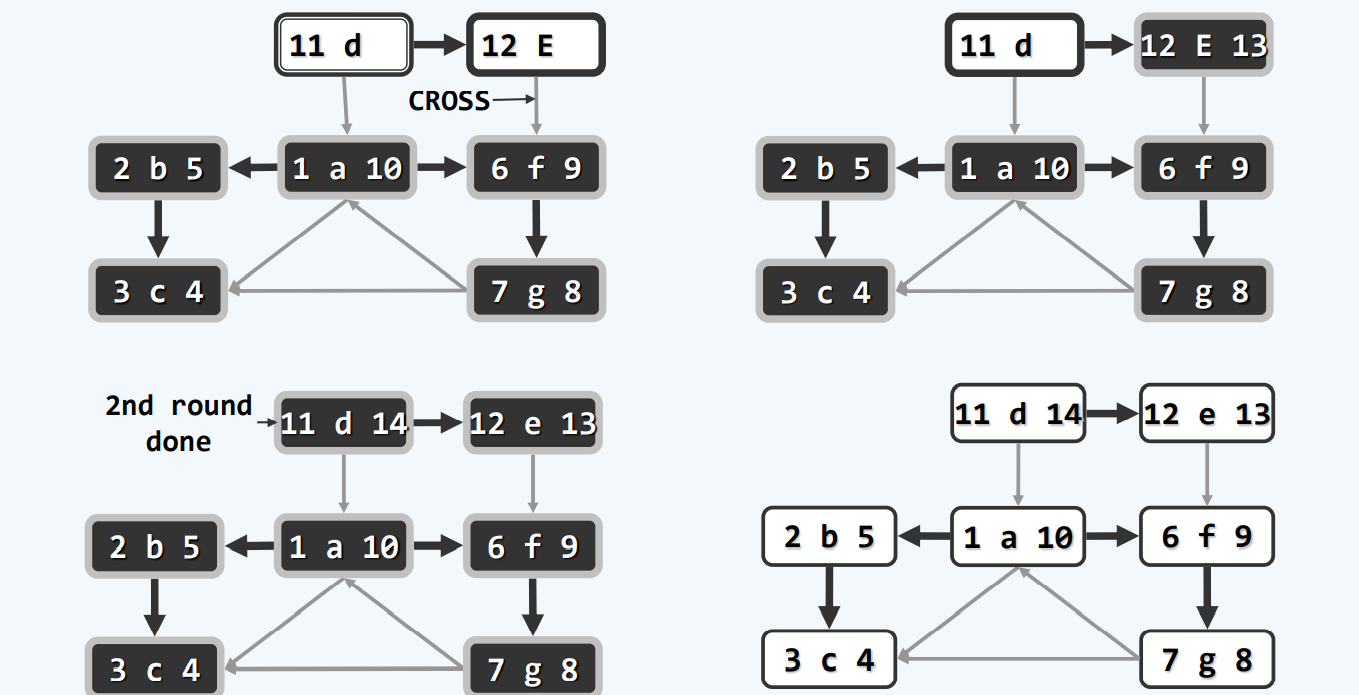
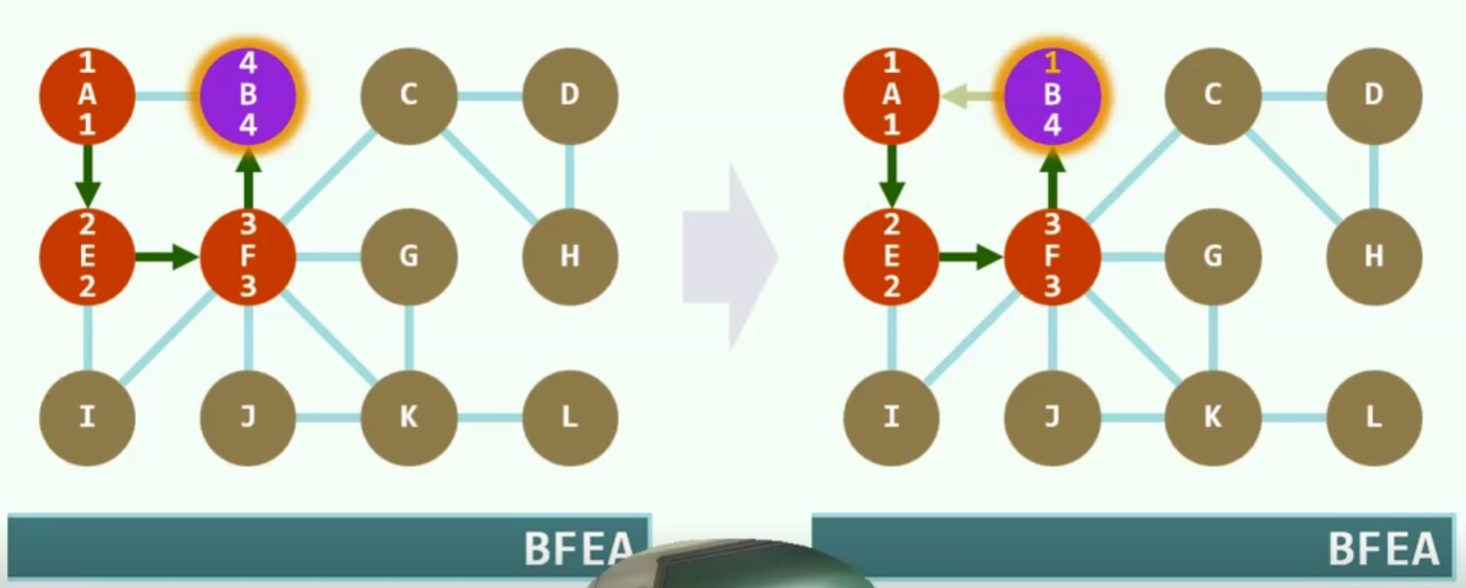
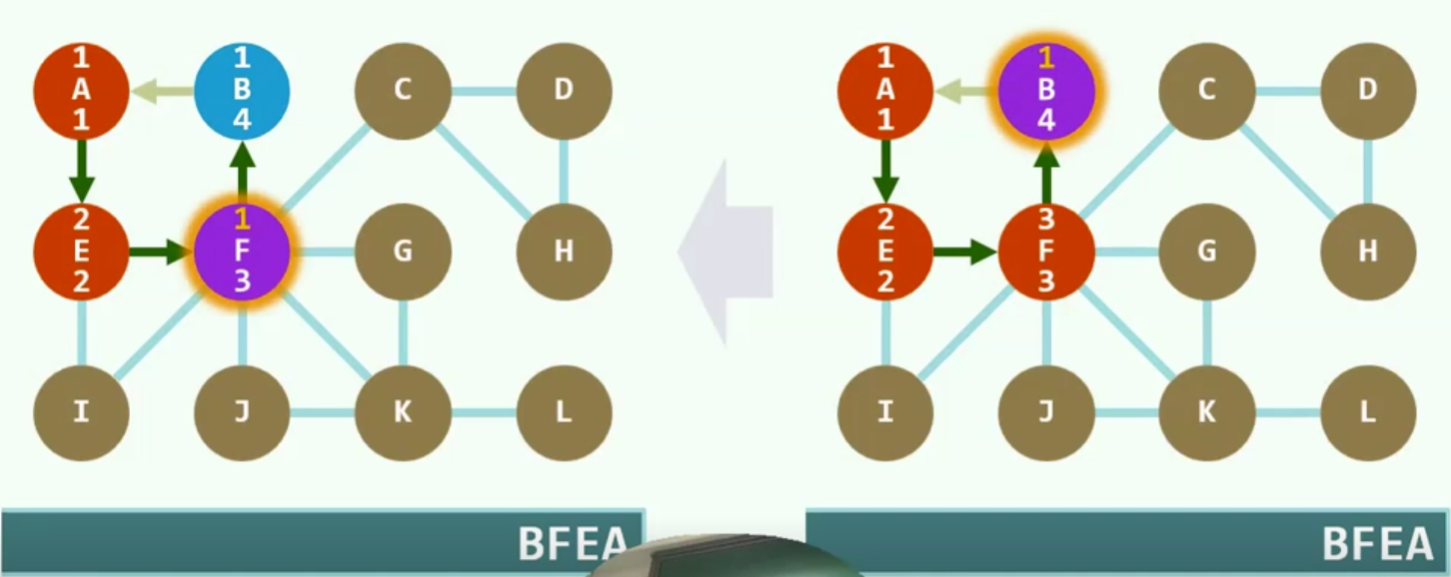
实例
无向图
没有前向边
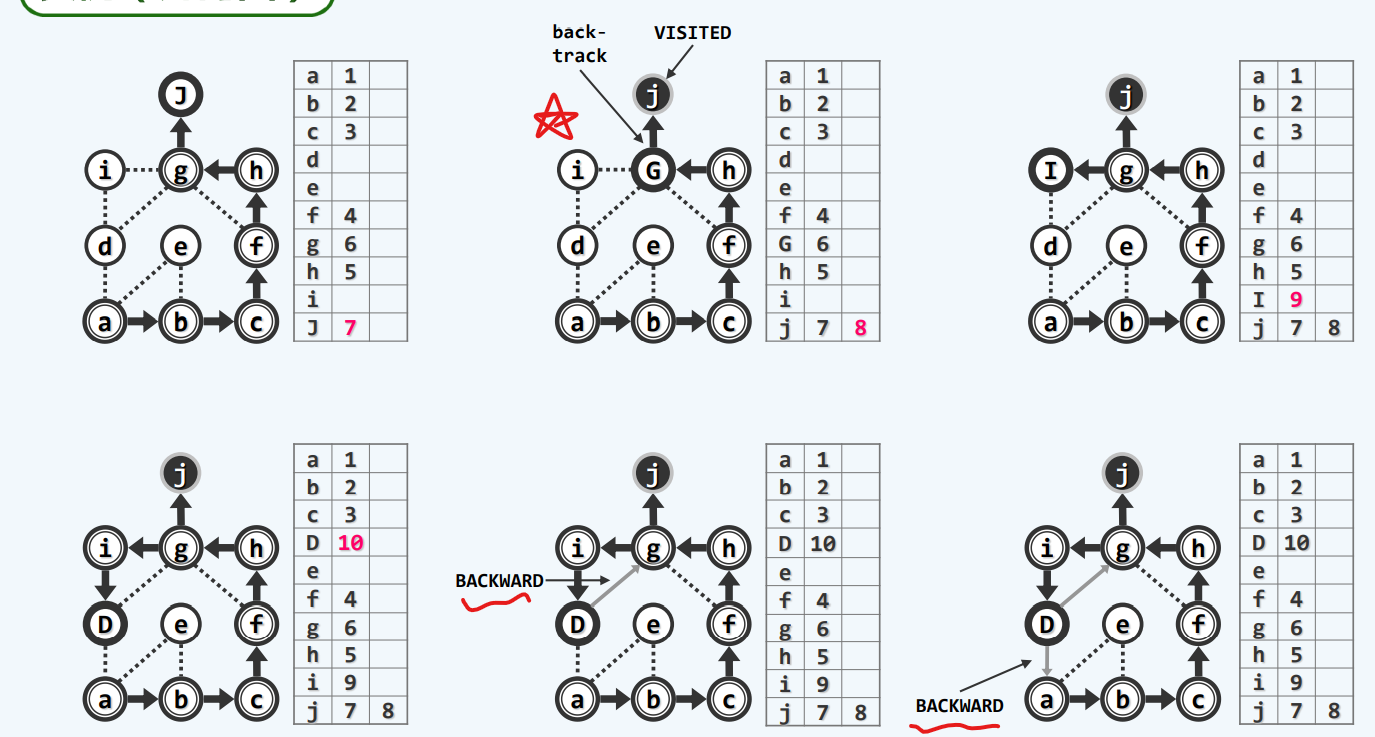
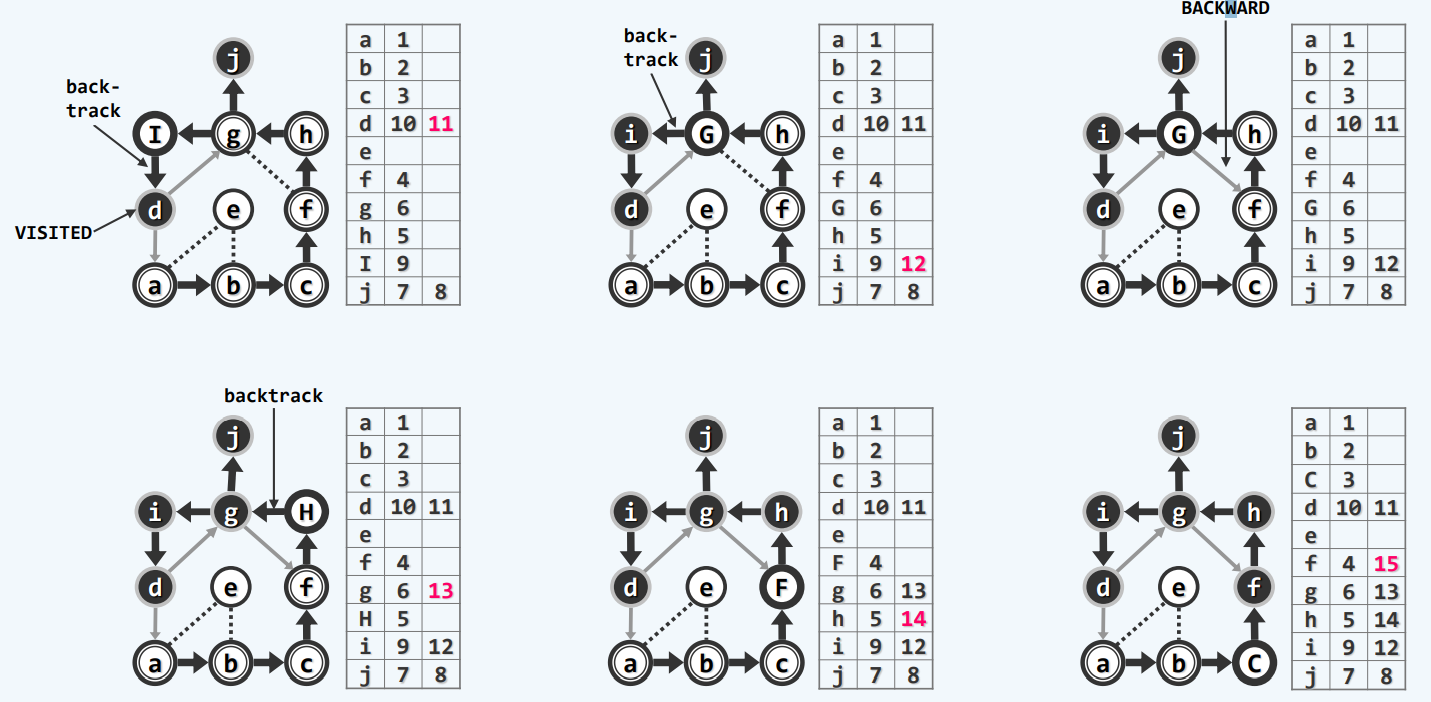
有向图
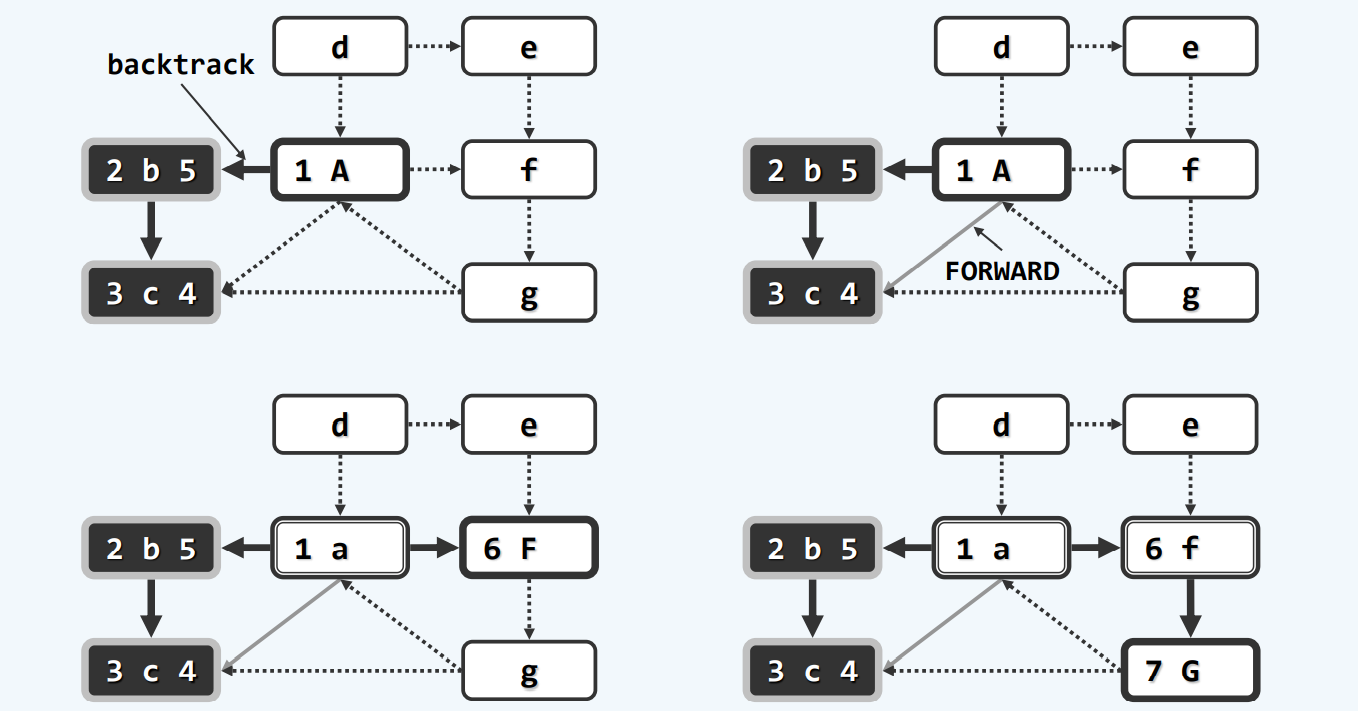
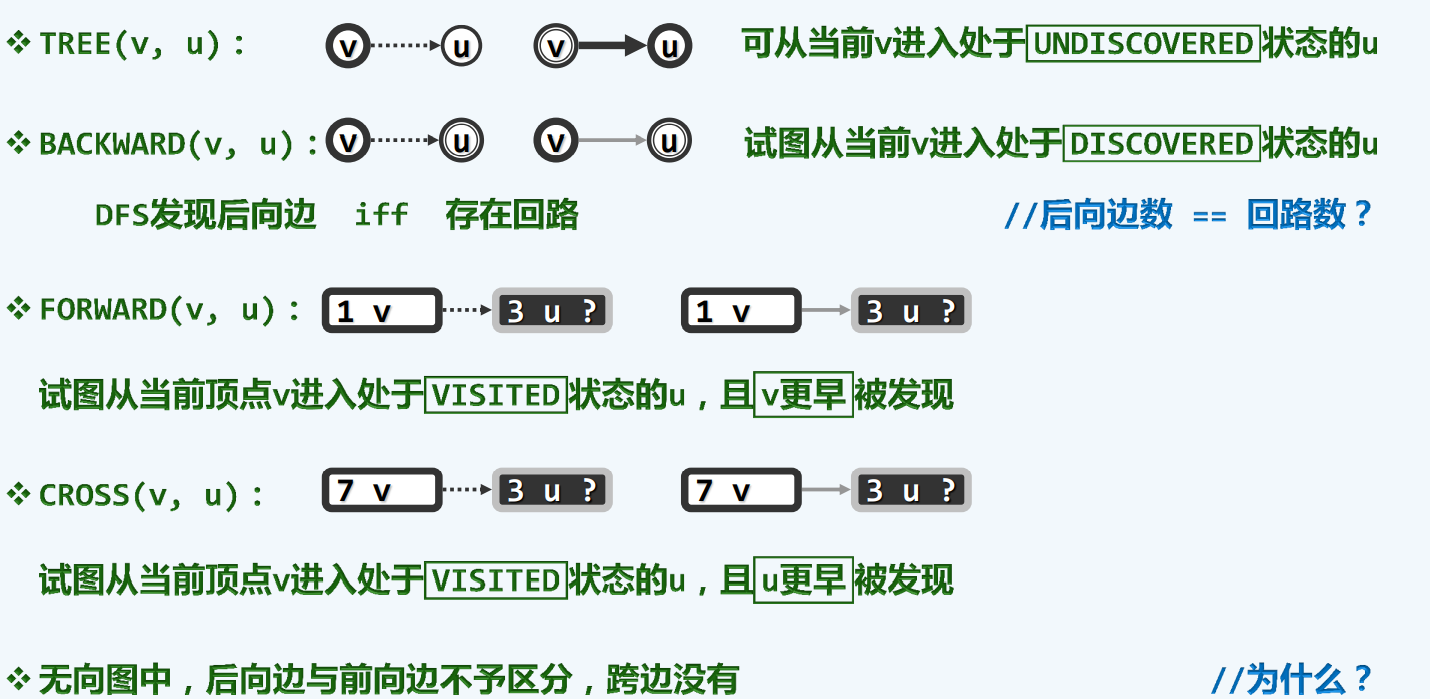
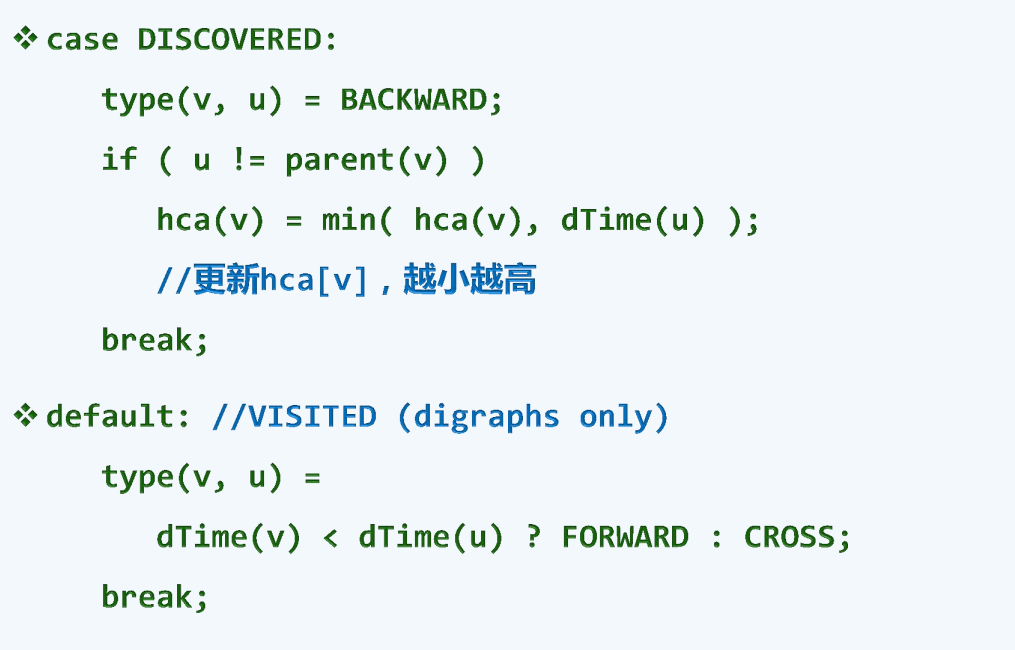
前向边(forward):这条边是由遍历树的祖先节点向前指向它的后代
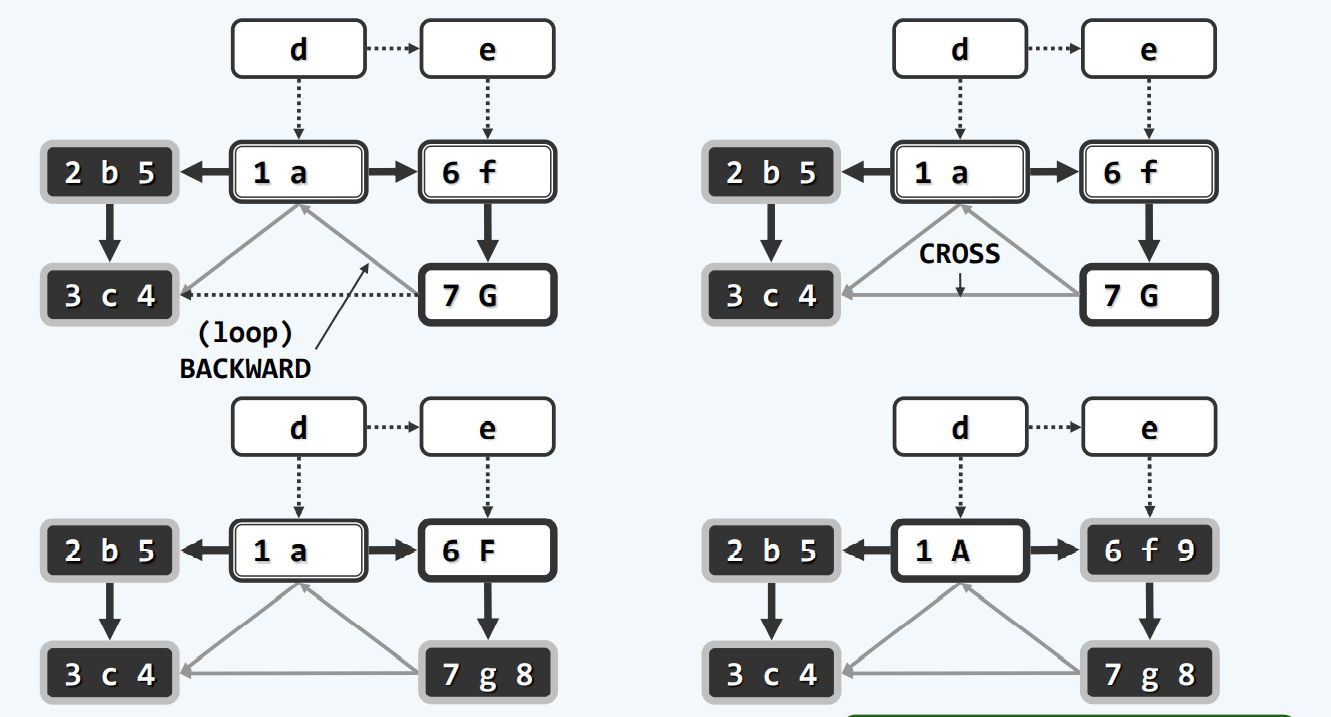
回边(backward):这条边由后代指向它的祖先
一旦遇到backward那我们至少发现了一个回路
嵌套(括号)引理
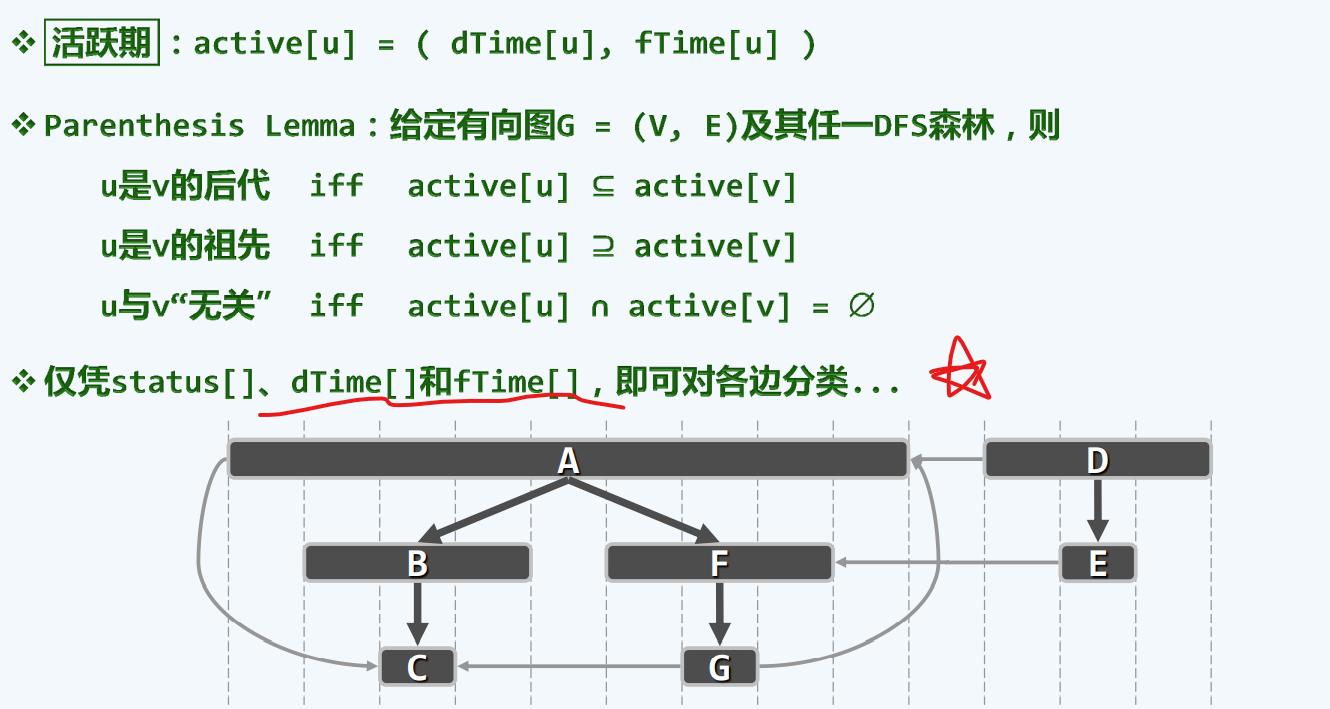
强大的工具,无序再不断溯流而上,判断各节点有无血缘关系….
更多便利之处,还需要后续不断深入体会。
DFS的一些总结
注意此处的单连通(singleconnected)指任意两个结点u,v,从u到v至多只有一条简单路径。这个问题作为上星题有难度,对于一次DFS来讲,如果存在forward edge则表明必定不是单连通图,但还要考虑cross edge,如果在一个DFS树来讲只要存在cross edge,就表明不是单连通
引理1:图G的DFS树中不含有forwardedge或cross edge,u是v的祖先结点,则从u到v的任何路径均会经过u到v的DFS树上的所有点
这个引理相当直观,可以对DFS树上u到v的tree edge数目使用数学归纳法严格证明
引理2:图G的DFS树中不含有forwardedge或cross edge,如果点u到v有两条完全不同的简单路径(路径上的点各不相同),则v必定为u的祖先结点
拓扑排序
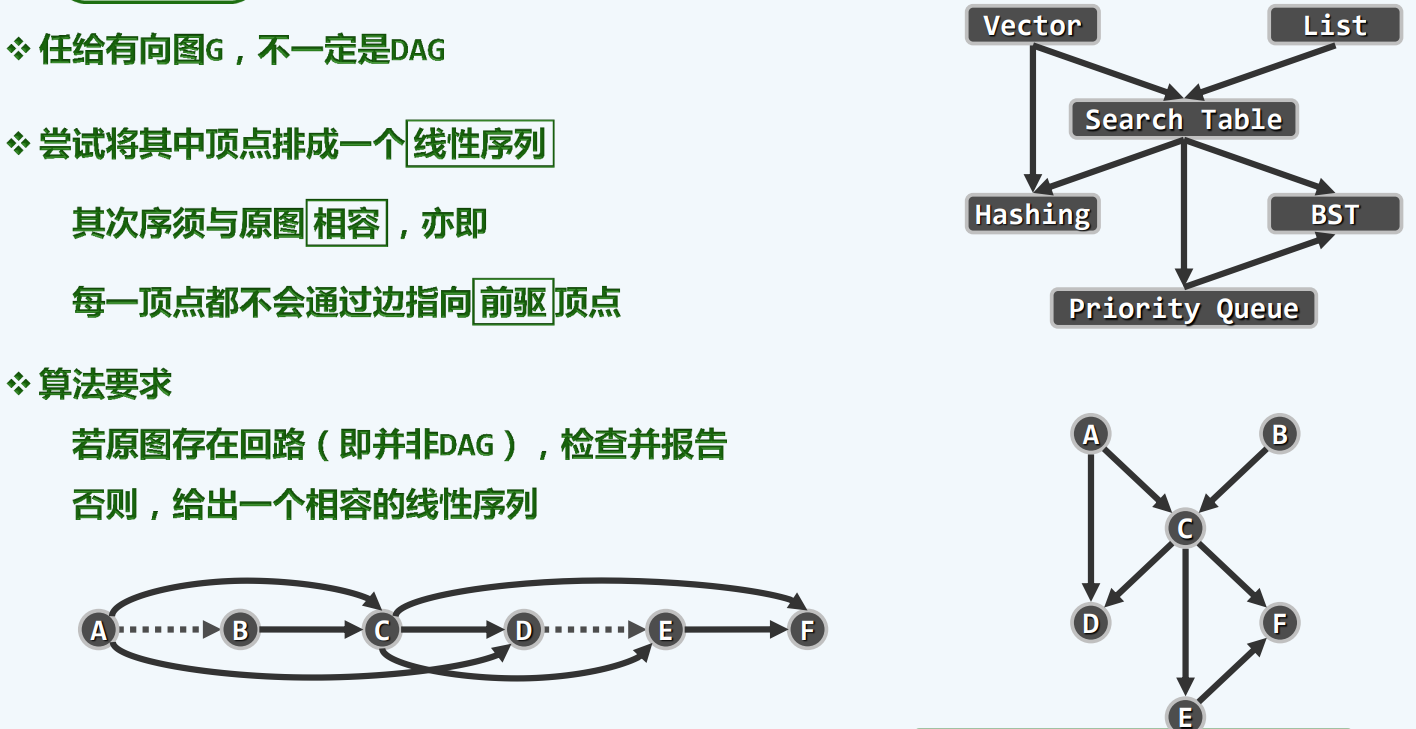
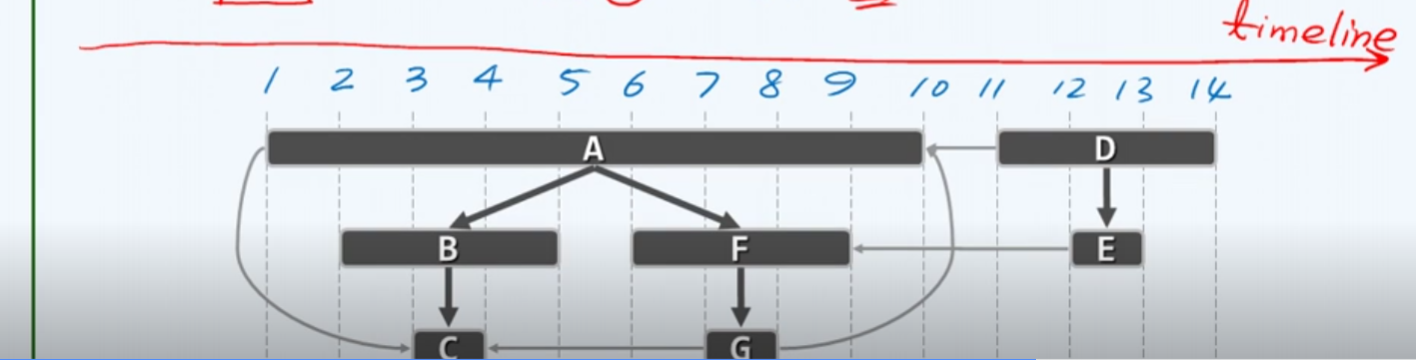
举个例子,也就是编排书本,一个好的拓扑排序就是,每当我讲到这一个知识点的时候,它所依赖的知识点,都应该在此前的某个时刻已经学过了,数学上,我们认为,也许,可能,存在这样一个线性序列
所以他是一个不折不扣的有向图(directed acyclic graph)[DAG],但是不能有环(学a先学b,学b先学c,学c先学a)
零入度
不推荐使用
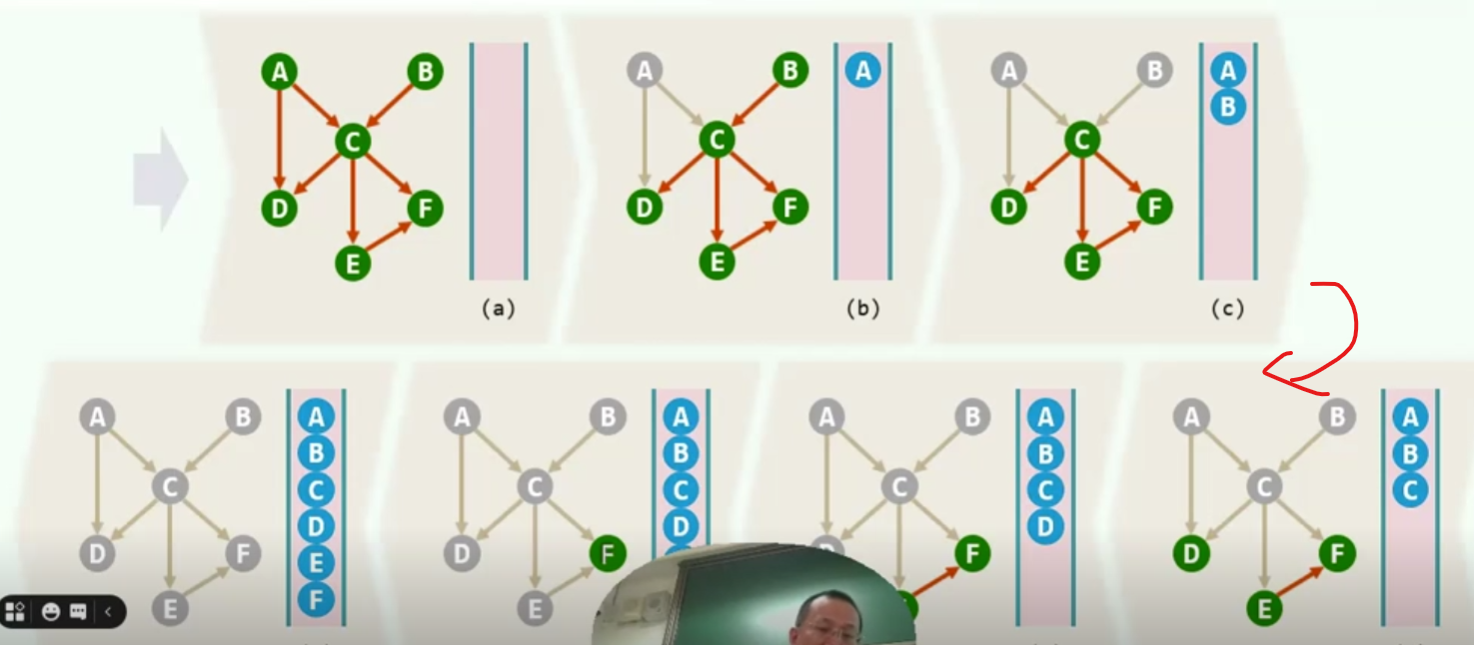
算法
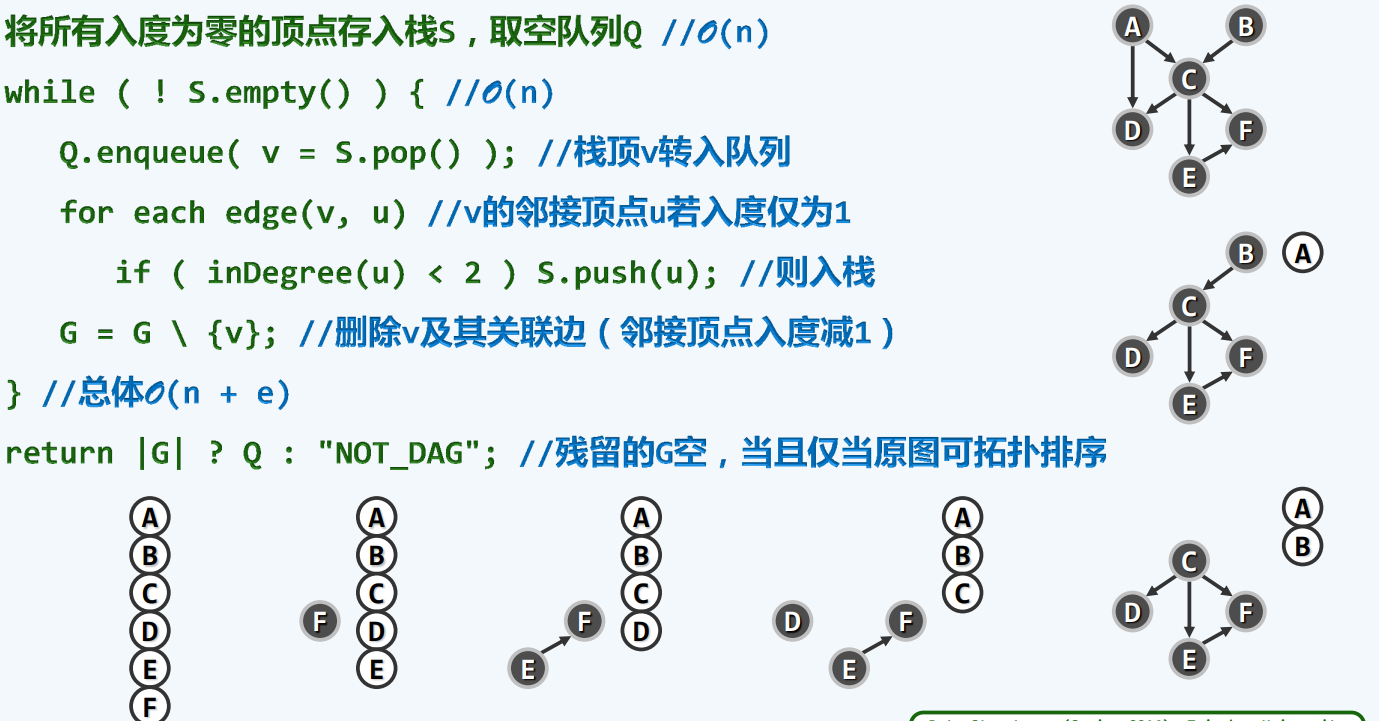
实例
一个一个找零入度的点,并且删除还要更新,可能对图本身也会造成伤害
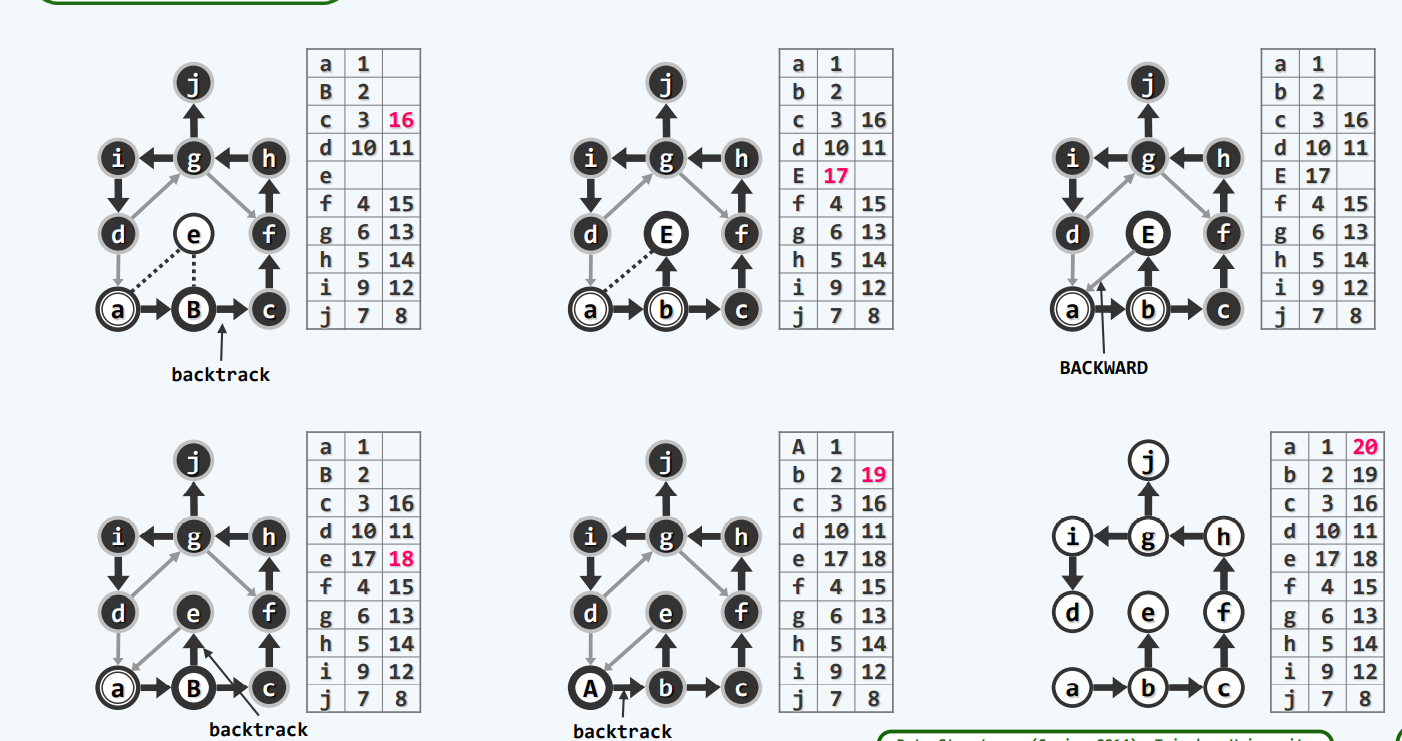
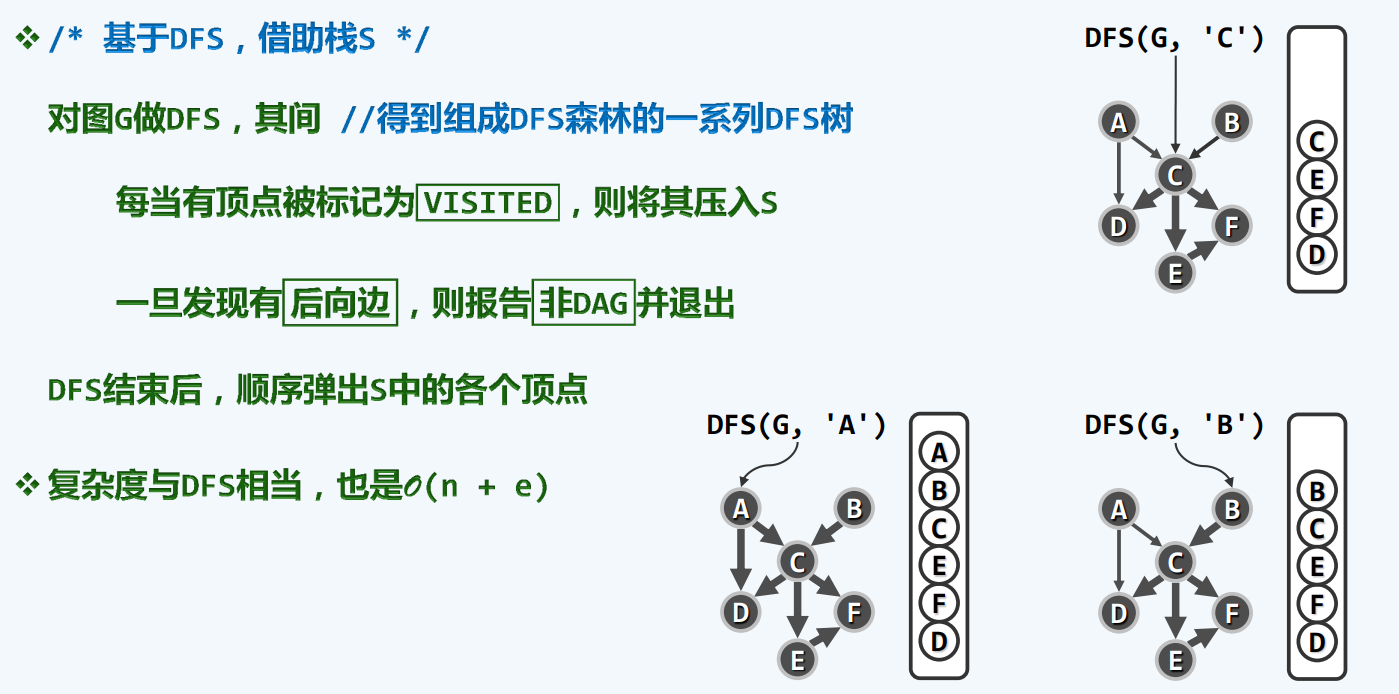
零出度
算法
随机一个点开始,先找到第一个backtrack的点,那个就是你最终需要到达的地方,然后不断backtrack,通过DFS的ftime排序,我们至少可以得到一个合理,甚至推荐使用的顺序。
当然,可能会有点没有遍历到,但是,我们实际使用,外面是要包一层dfs的!
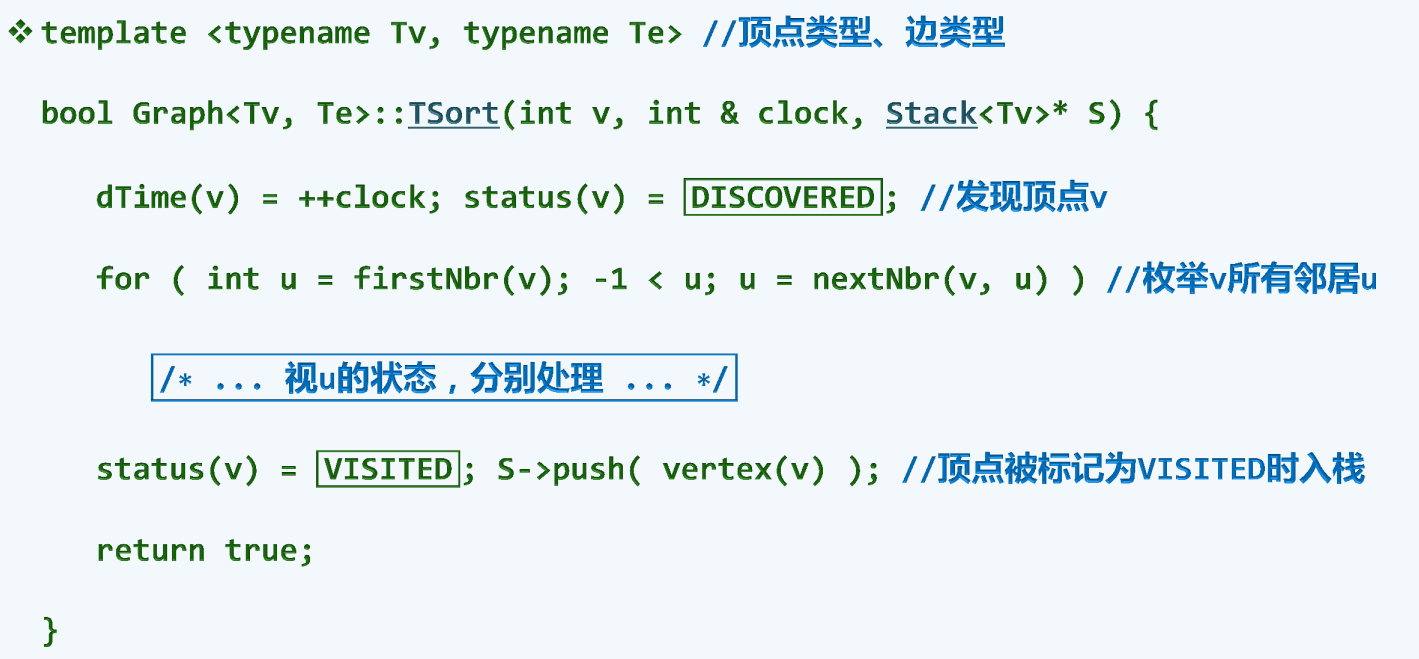
1 | template <typename Tv, typename Te> //基于DFS的拓扑排序算法 |
双连通分量(BCC)
引入连通
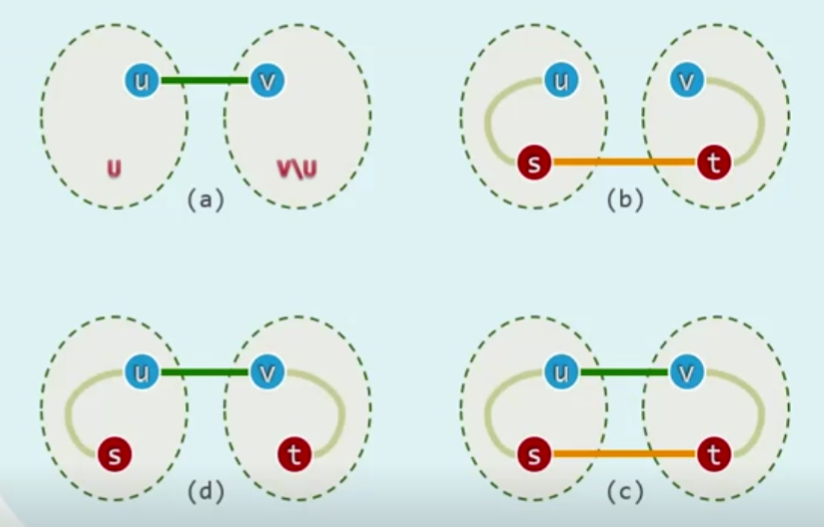
设D是一个有向图,如果D中任意两个结点都彼此可达,则称D为**强连通图。如果D中任意两点 之间,有
之间,有 到
到 可达或到可达(称为单向可达),则称D为单向连通图。如果有向图的底图是无向连通图,则称D为弱连通图**。
可达或到可达(称为单向可达),则称D为单向连通图。如果有向图的底图是无向连通图,则称D为弱连通图**。
注意:强连通图必是单向连通图,单向连通图必是弱连通图。但反之未必。
例1 图1(a)是强连通图,图1(b)是单向连通图,图1(c)是弱连通图,图1(d)不是弱连通图。 [2]
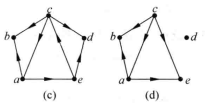 图1(a)、(b)
图1(a)、(b)
图1(c)、(d)
双连通介绍
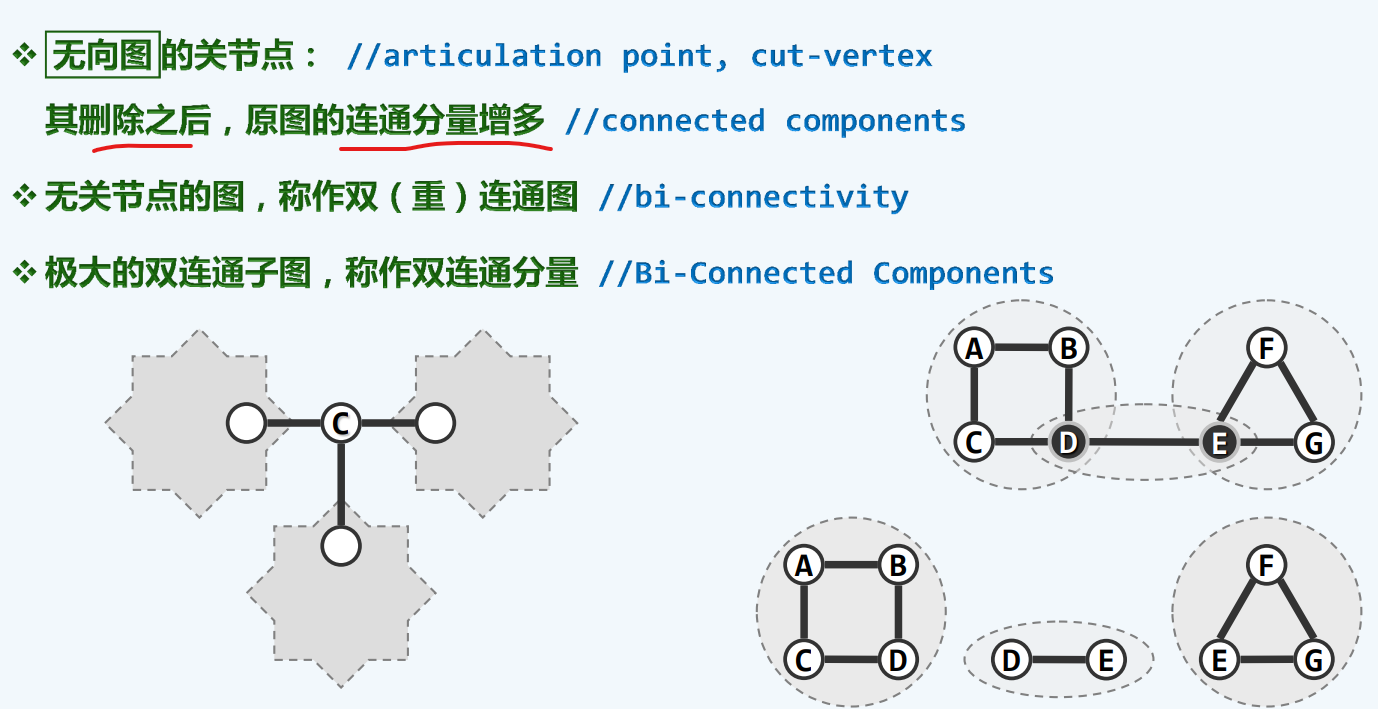
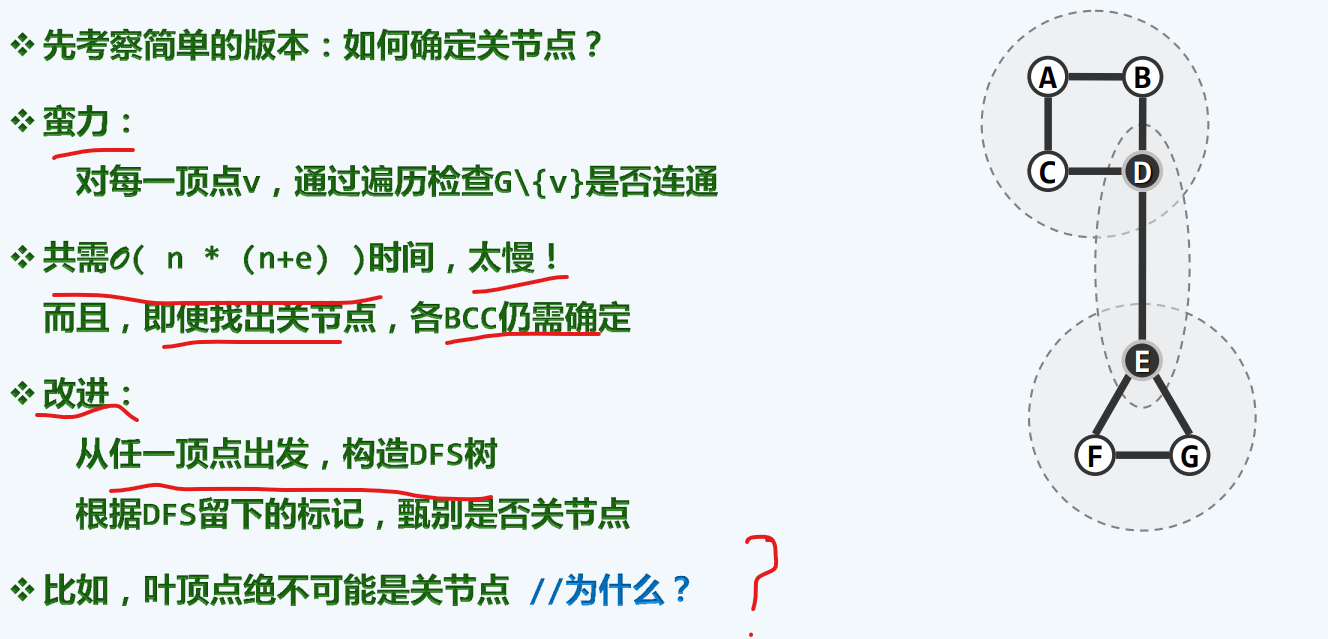
判定准则
因为叶节点就算摘出,即便对那个树来说也不会影响连通性,更何况是连通图呢。
对于根节点而言,因为你是率性的取得,有可能是,有可能也不是
当根节点只有一度,那它和叶子无异,则不可能是,反过来,它是两度或者三度,那么它必然就是关节点,无形中成为了关节点,不然他的两个孩子不可能连接起来
对于内部节点而言
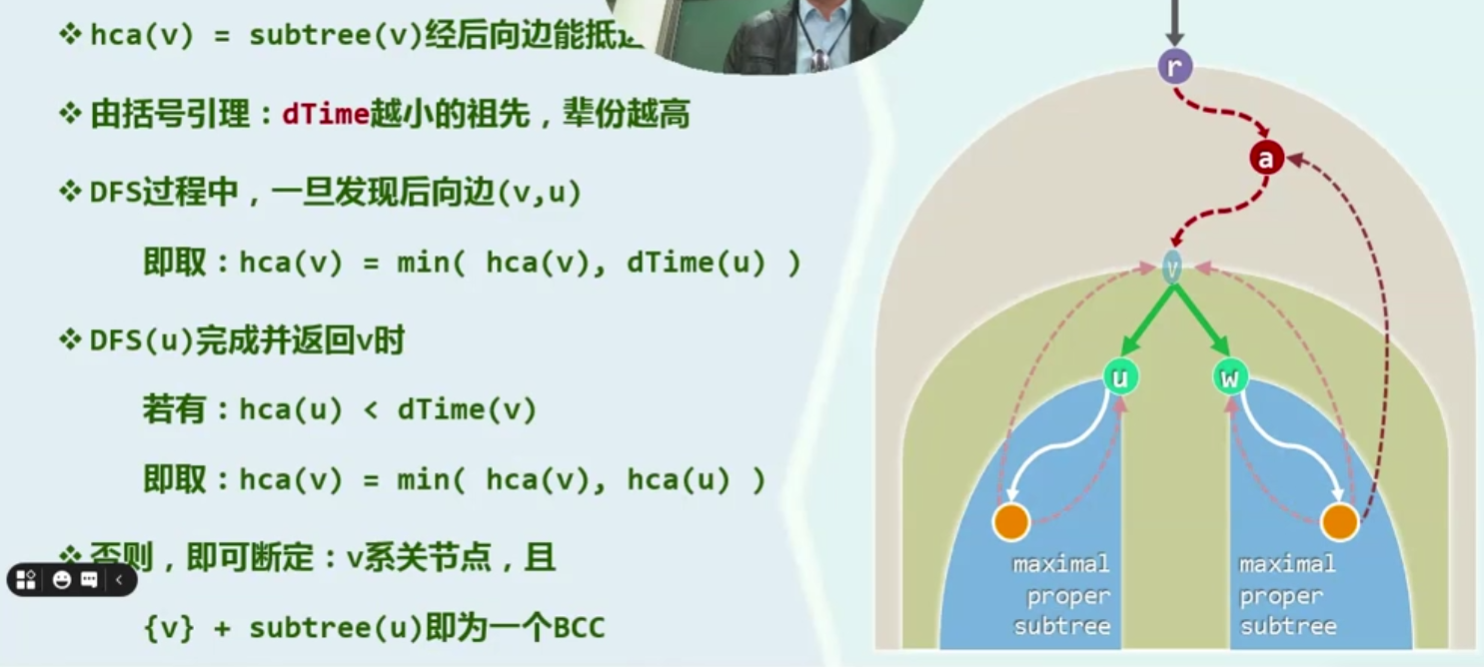
v的右儿子的小家族,有人可以够着比v还高的祖先,所以即便他消失了,这个小家族也能和整个家族连接起来,所以这个角度来说v不是关键节点。
v的左儿子的小家族则不行,所以从这个意义上来说v是关键节点。
如何判断是否是祖先?虽然这个时候我们没有ftime,但是我们有dtime,dtime越小,辈分越高。使用括号引理
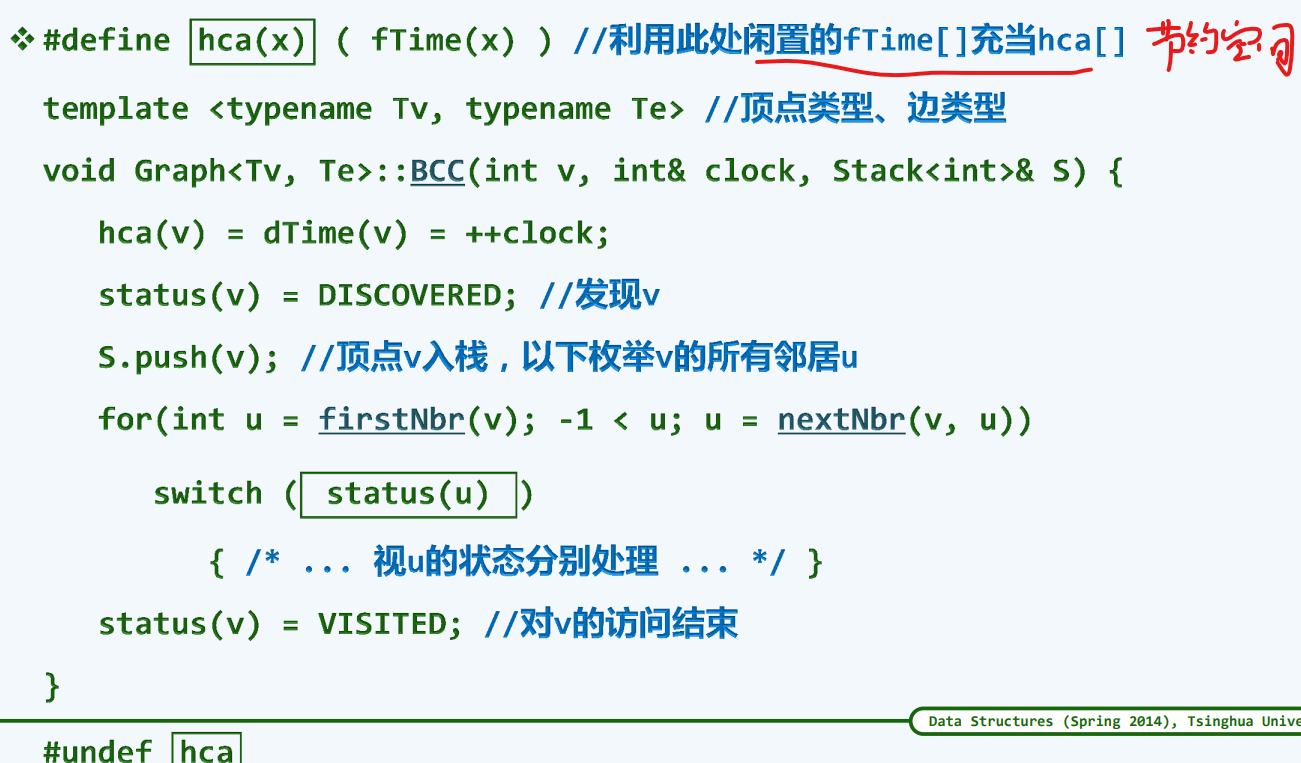
算法实现
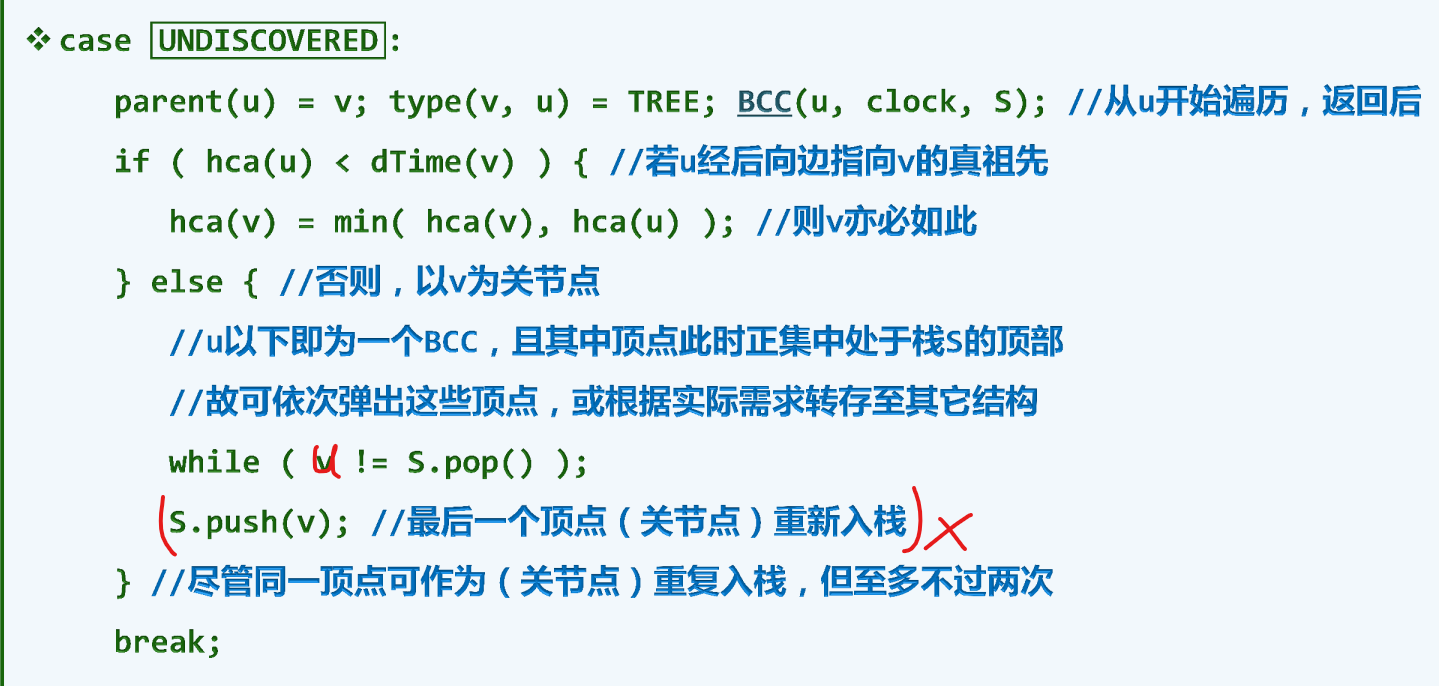
如果以V作为pop的最终的话,可能会出现把一些不该pop的提前pop了,尽管他们是父子,但物理上进站未必是连续的
实例
紫色代表当前节点,红色代表已经发现,还未利用,蓝色代表燃烧殆尽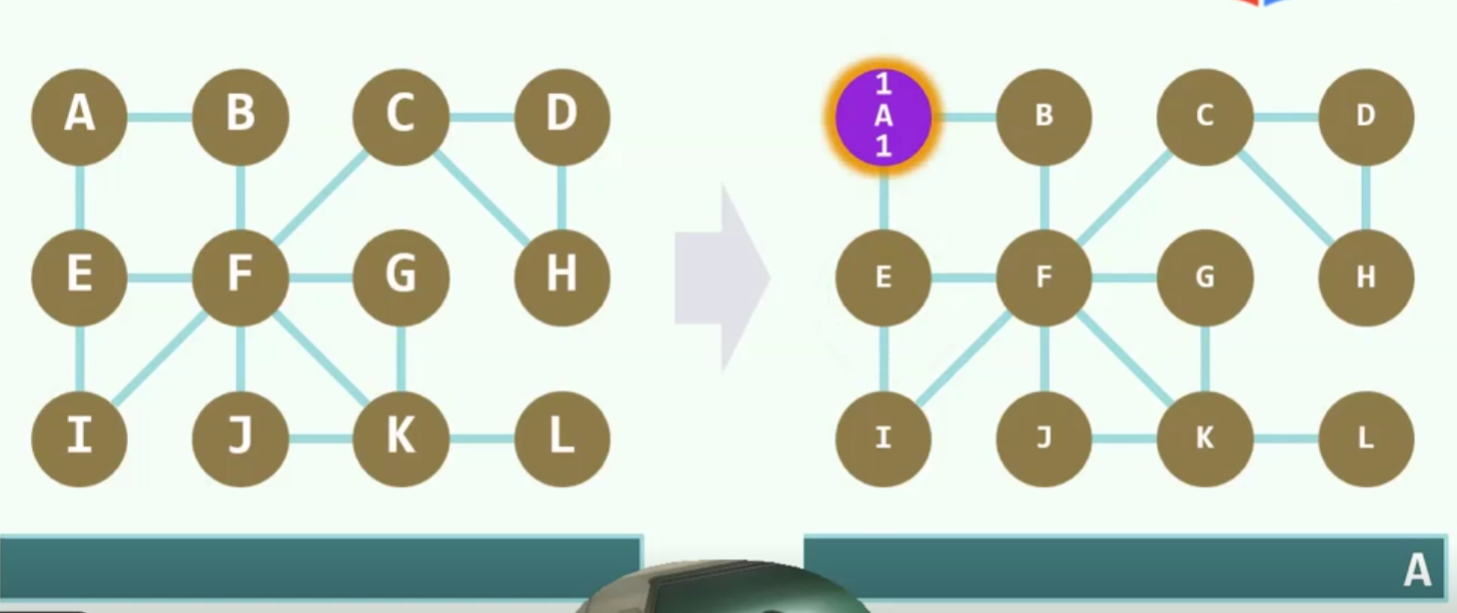
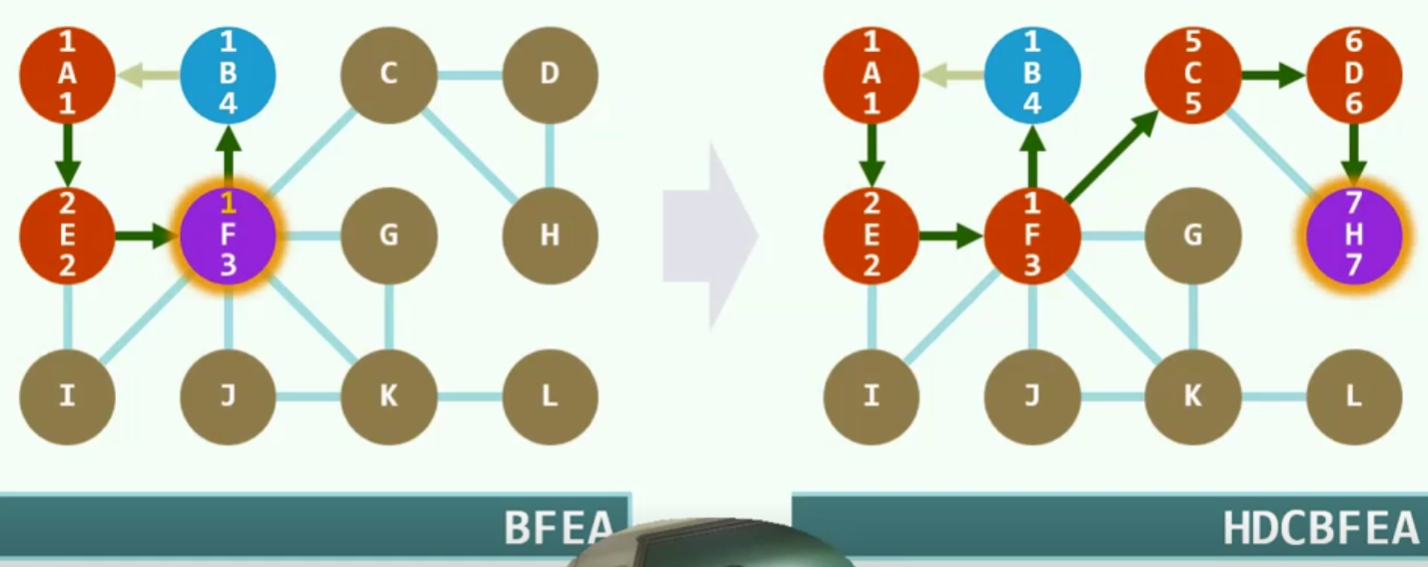
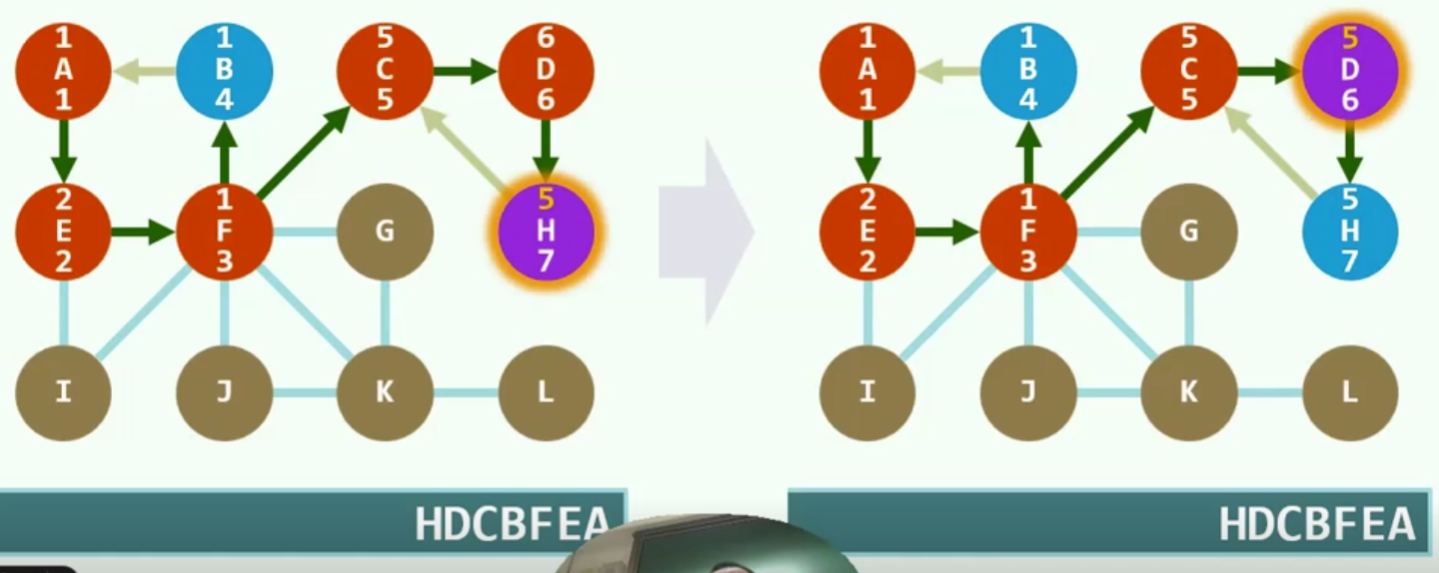
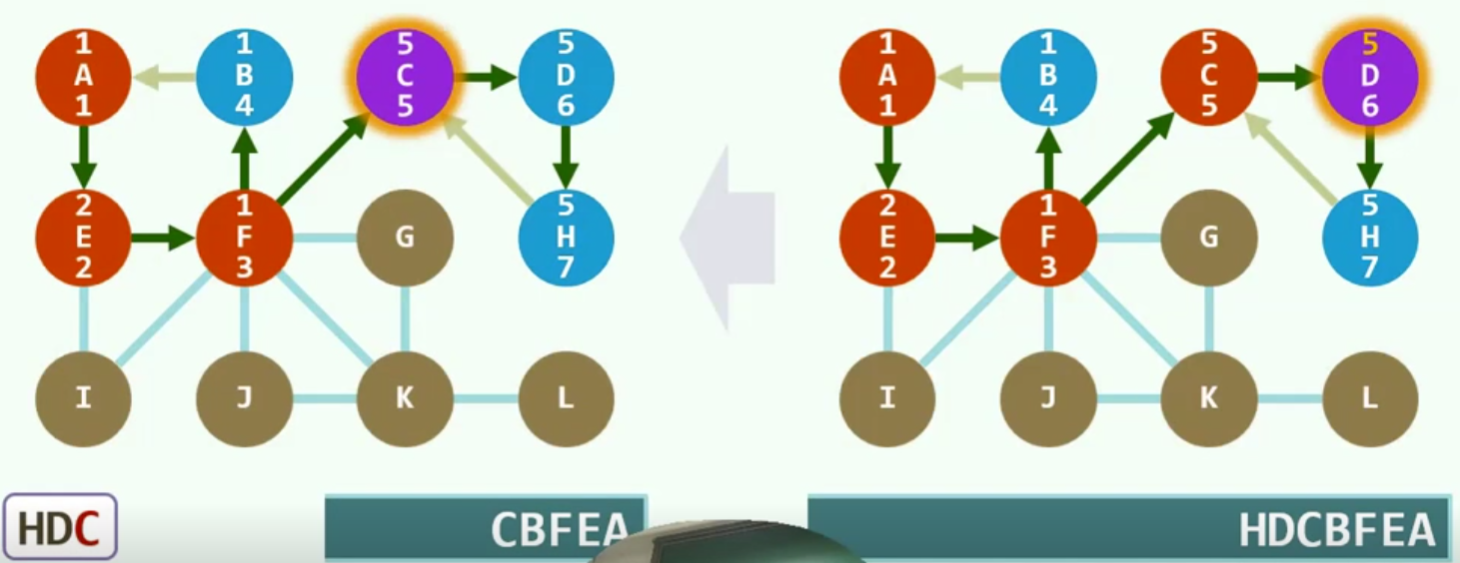
注意:此时c在栈顶,可是它的父亲F并不在栈顶,所以不要直接popF
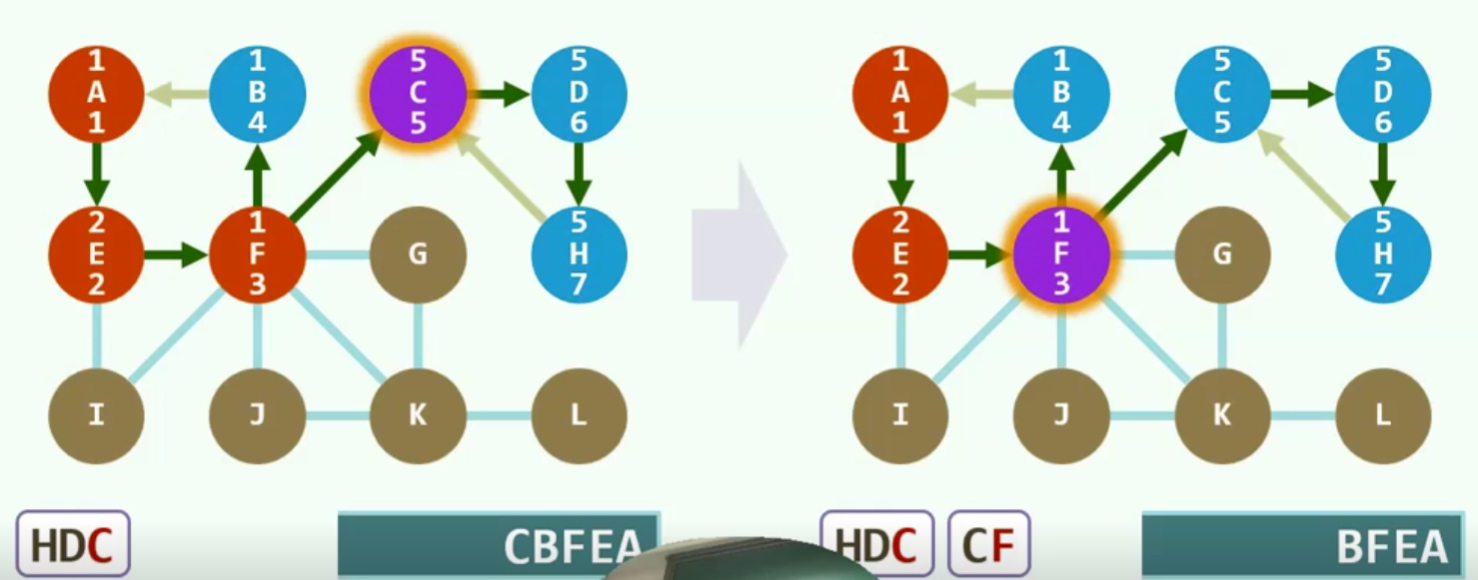
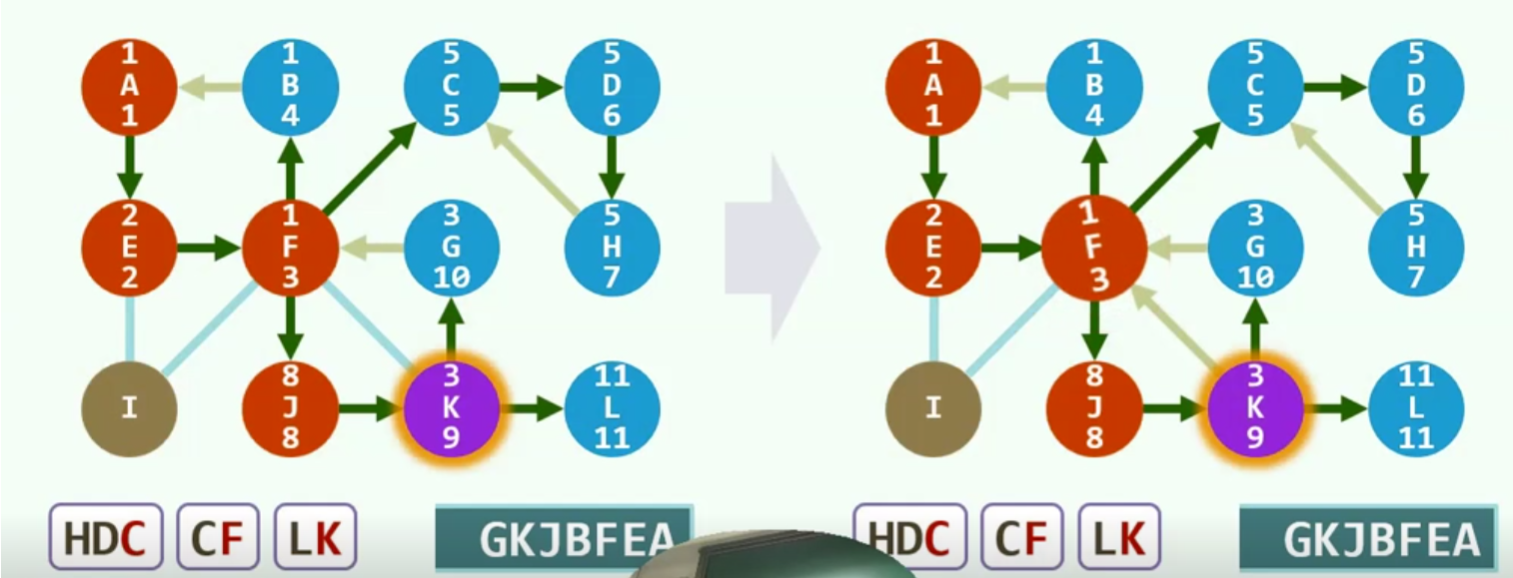
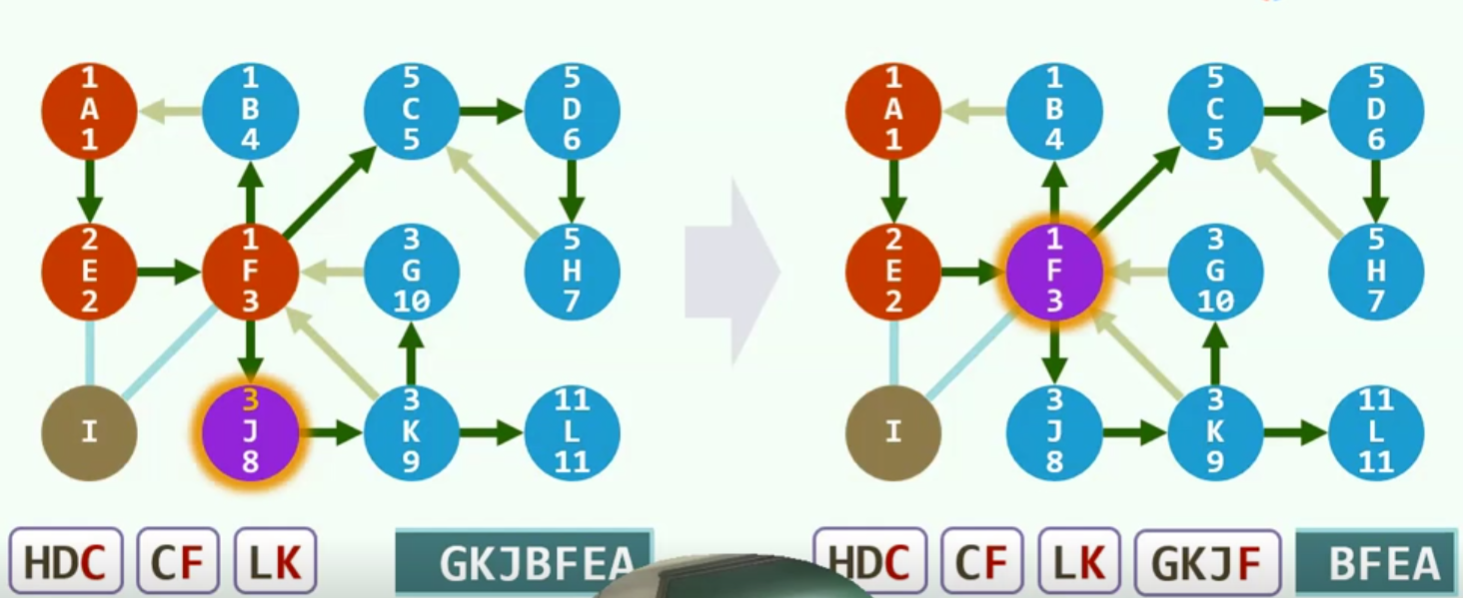
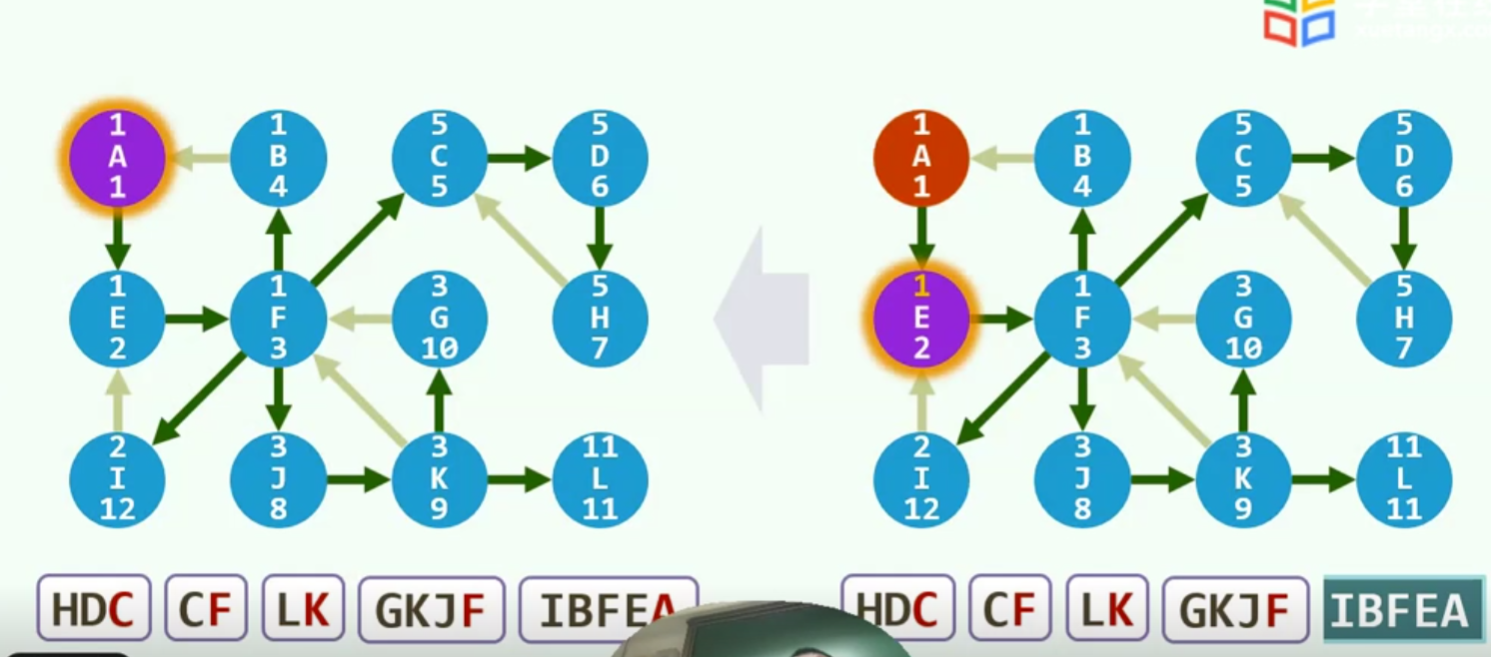
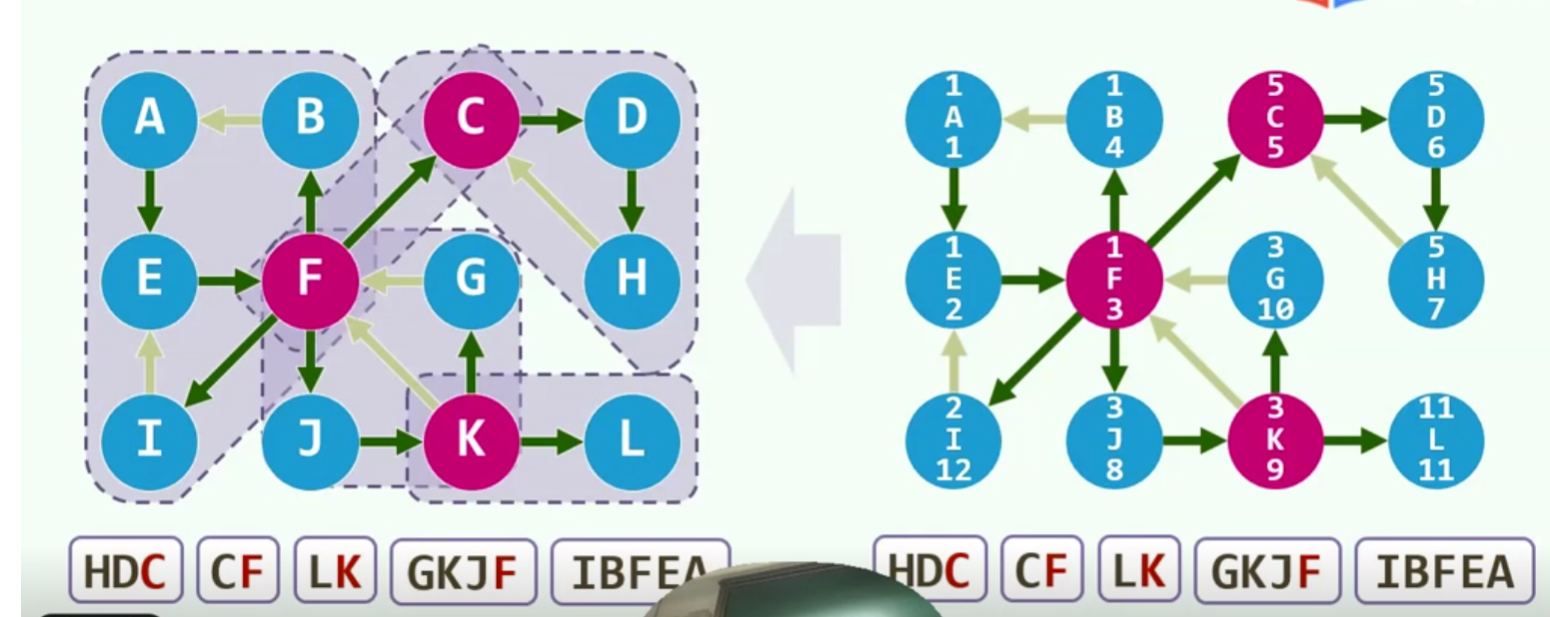
所有完成后,得到四个社交的子网络,各自是双连通的
优先级搜索
BAG
蓝色代表已经选出来的点,红色代表待选,通过每个点的参数max/min,依次排序选出
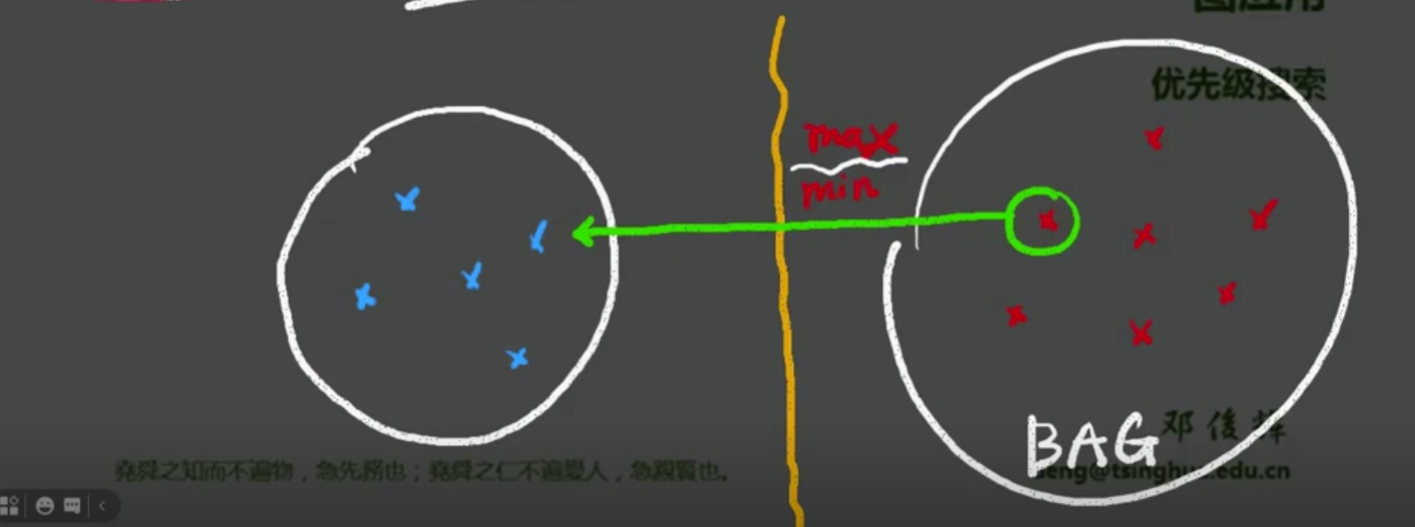
BAG如果是queue,我们用bfs也许更好,如果是stack,一猛子扎进去,最近的优先,那么dfs也不错
算法其实是依赖于数据结构的
ADT
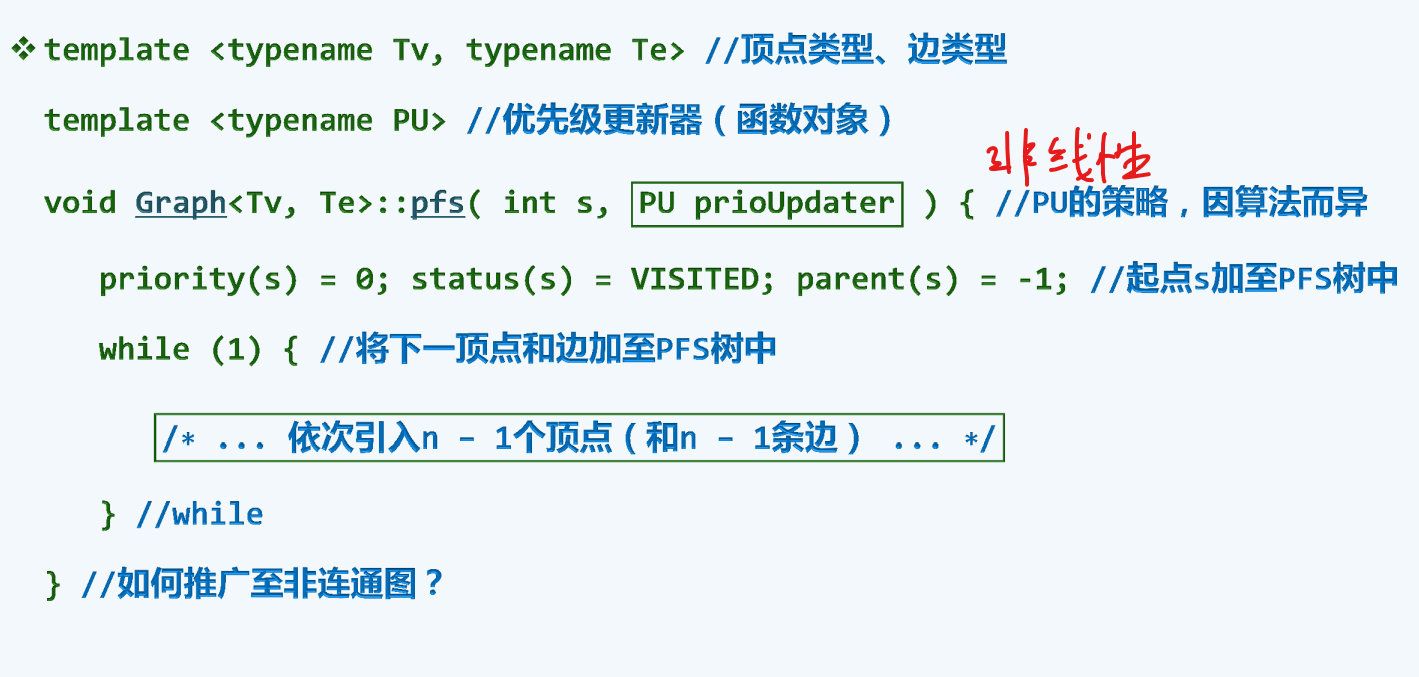
while+for,时间复杂度n²
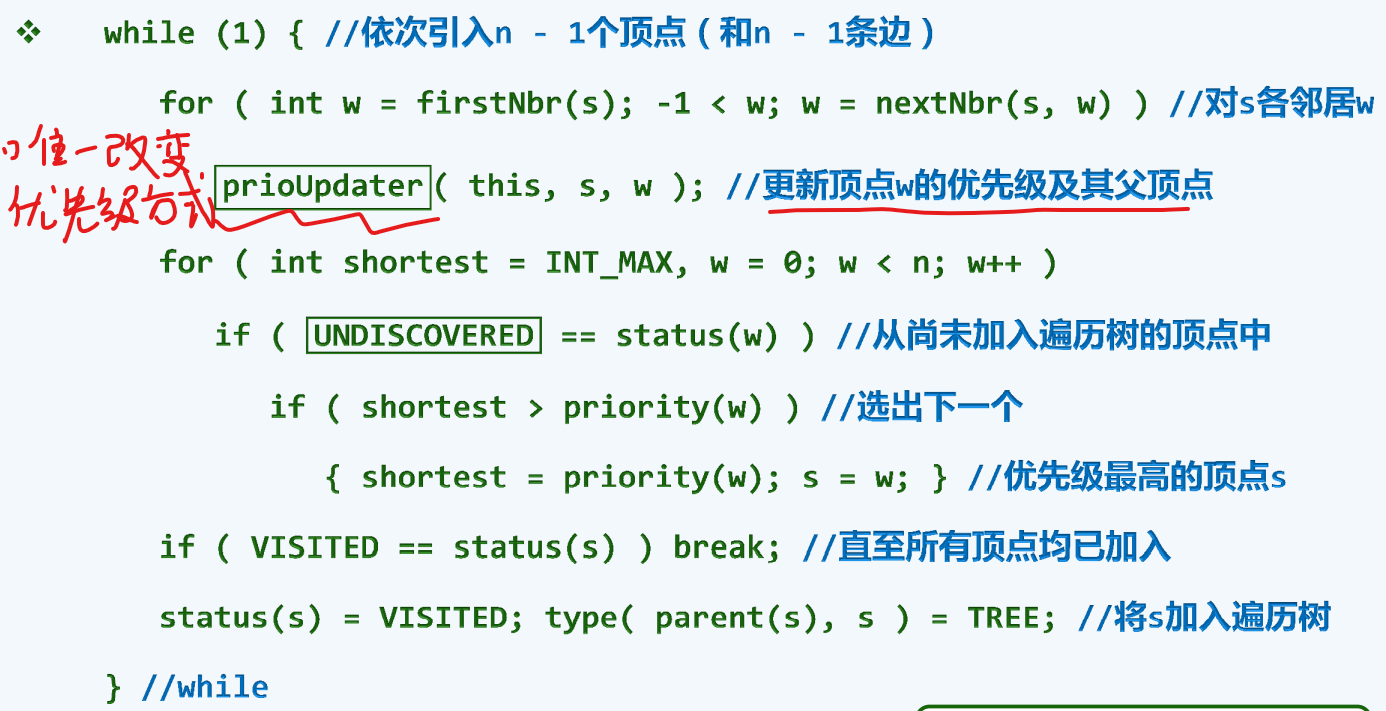
更新器更新策略,虽然不具体知道,但是知道他是依据于什么的。
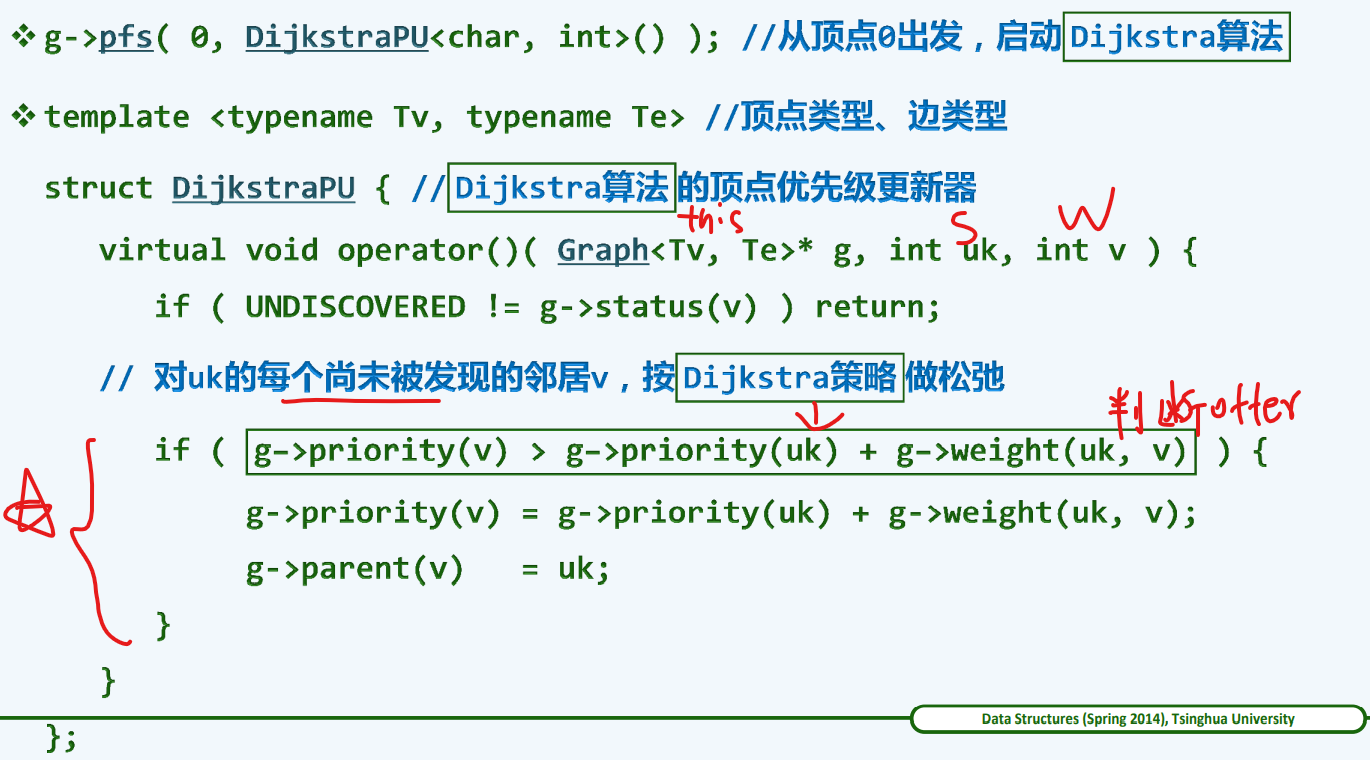
this就是这幅图,在这幅图中,如果s刚刚被访问过,那么他的邻居(w)就有机会上位
for+if+if嵌套,其实就是做一个select 这个叫shortest 那个叫highest
那么,这么效率这么低,那么我们如何改进呢?有了这个想法,有了这个动力,那我们就能继续往下深入,(代码的结构差异非常的小)差别不会到两行,一行半
Dijkstra
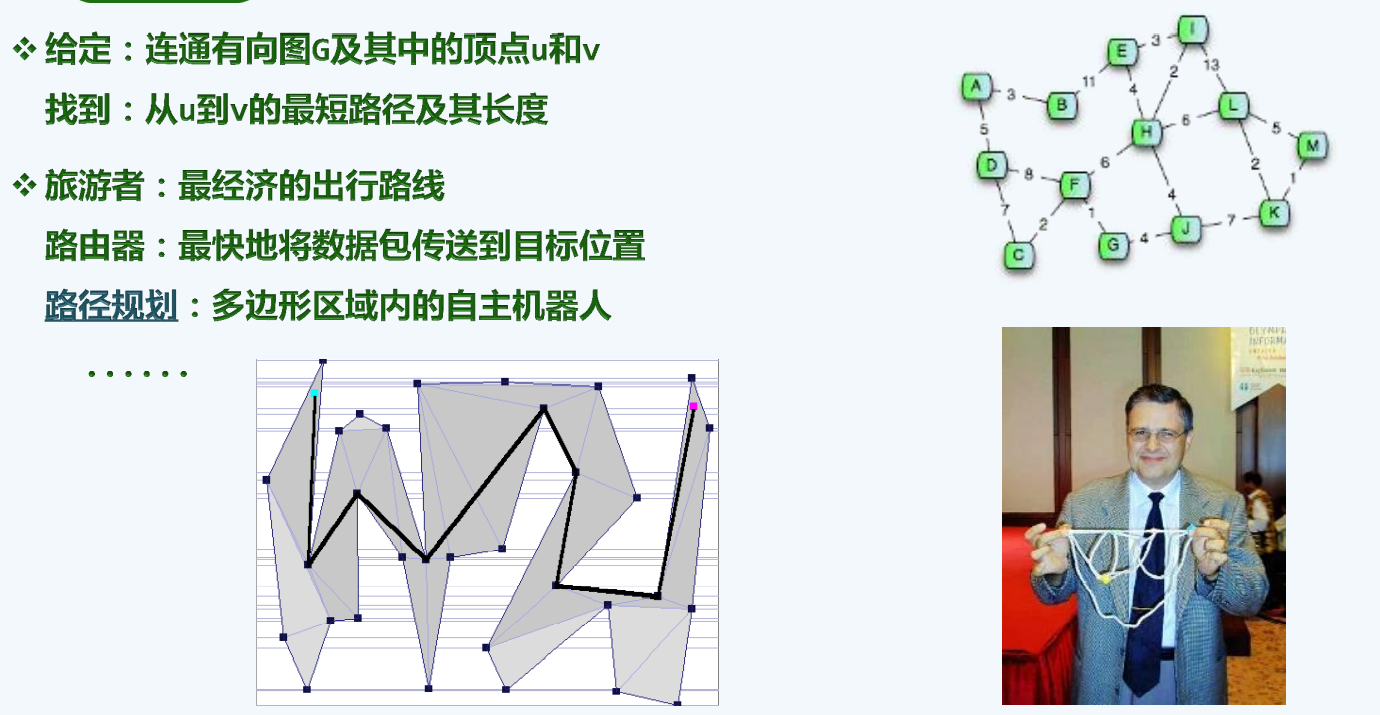
Shortest Path
Humble Programmer
String Computer
其实,最短路问题,如果我们能造一个绳子计算机的话,,,,,,,
Insight
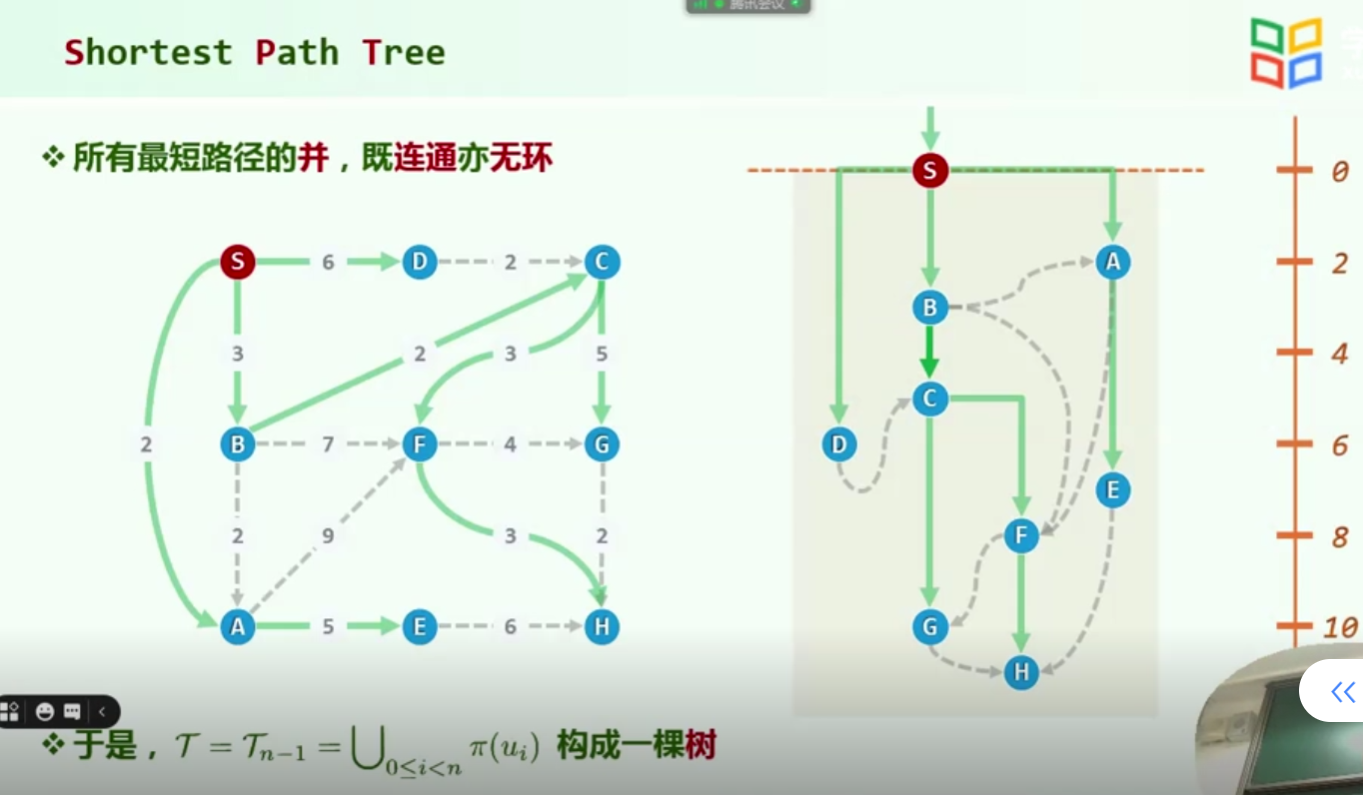
n - 1条边没有回路,最短路支撑树,理解的过程,软的,刚性的网,拉住S,匀速的,让这个网,离开桌面,而离开桌面的时间就是最短路距离的一个精确度量,而我们要做的事情,就是去模拟这个过程
过程推导–> 如果有k个点已经离开了桌面,那么第K+1个,又应该如何呢?(简而治之)
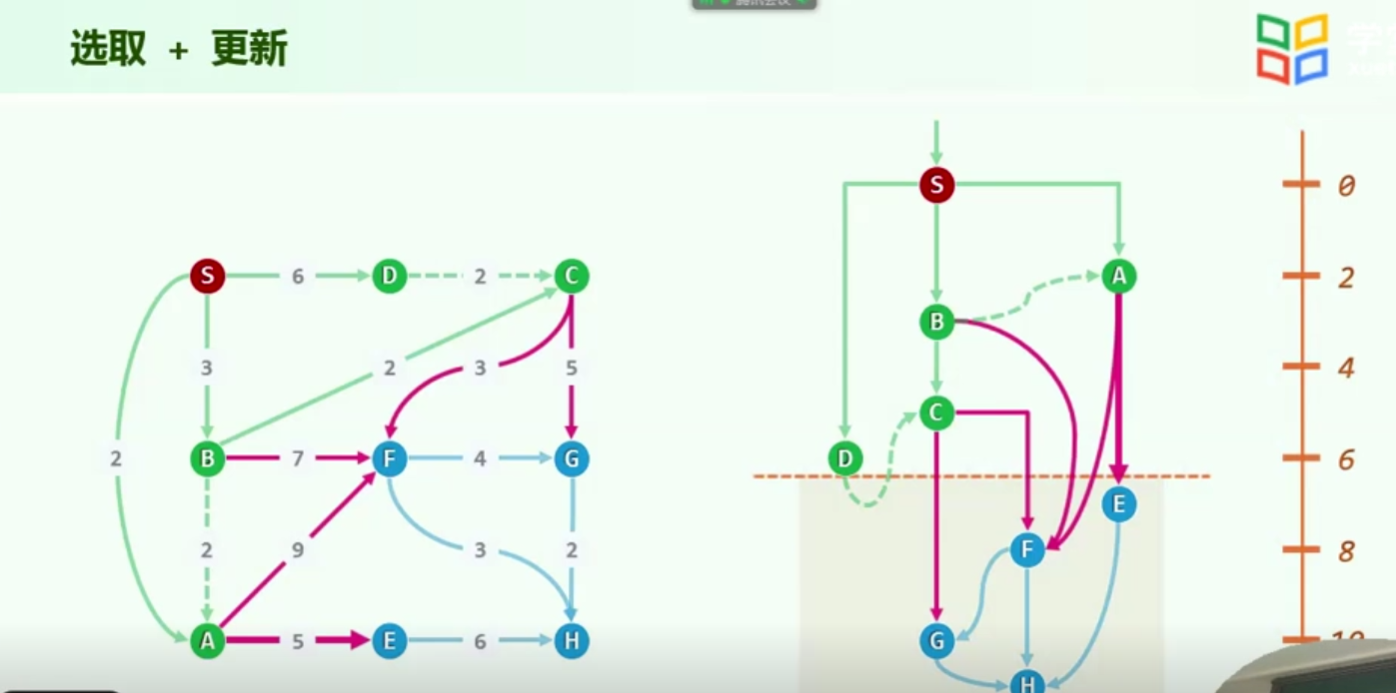
每一个人再拉起来之前,都可能收到它朋友的offer,它可以选择采纳,也可以选择不采纳(不止一个朋友)拉起来之后,都会再继续向它的还没有起来的朋友,提供offer,延续前人们的传统,而判断是否接受谁的offer,就是看它朋友给他提供的优先级,加上他们之间的边的优先级,谁的更好,就选谁的
更新器-kstra
Parent
科学,人文,人生,一定要区分开,计算机是追求功利,追求极致的效率,而人生未必如此
Prim
引入(MST)
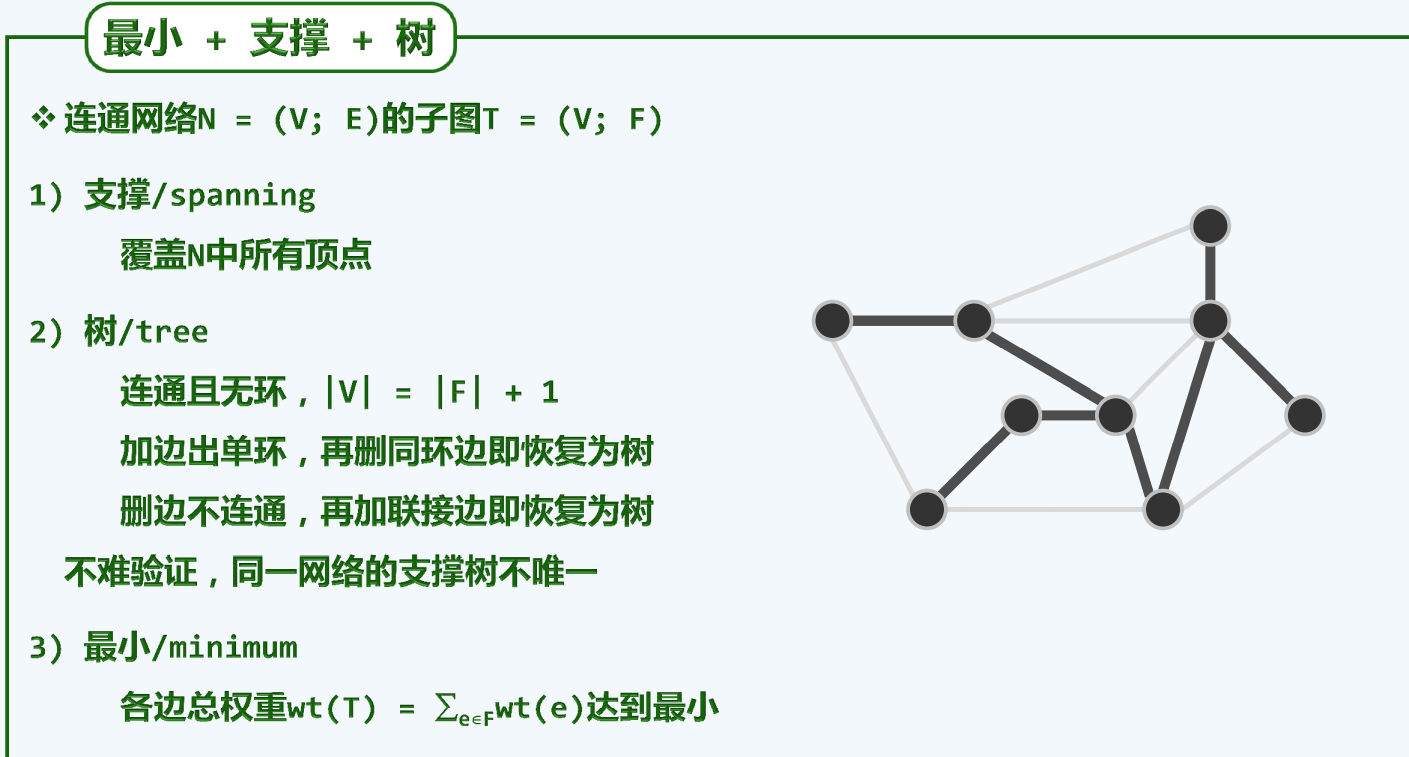
从一个点,连到很多个点,最小生成树
任何一种网络何尝不是这样
应用
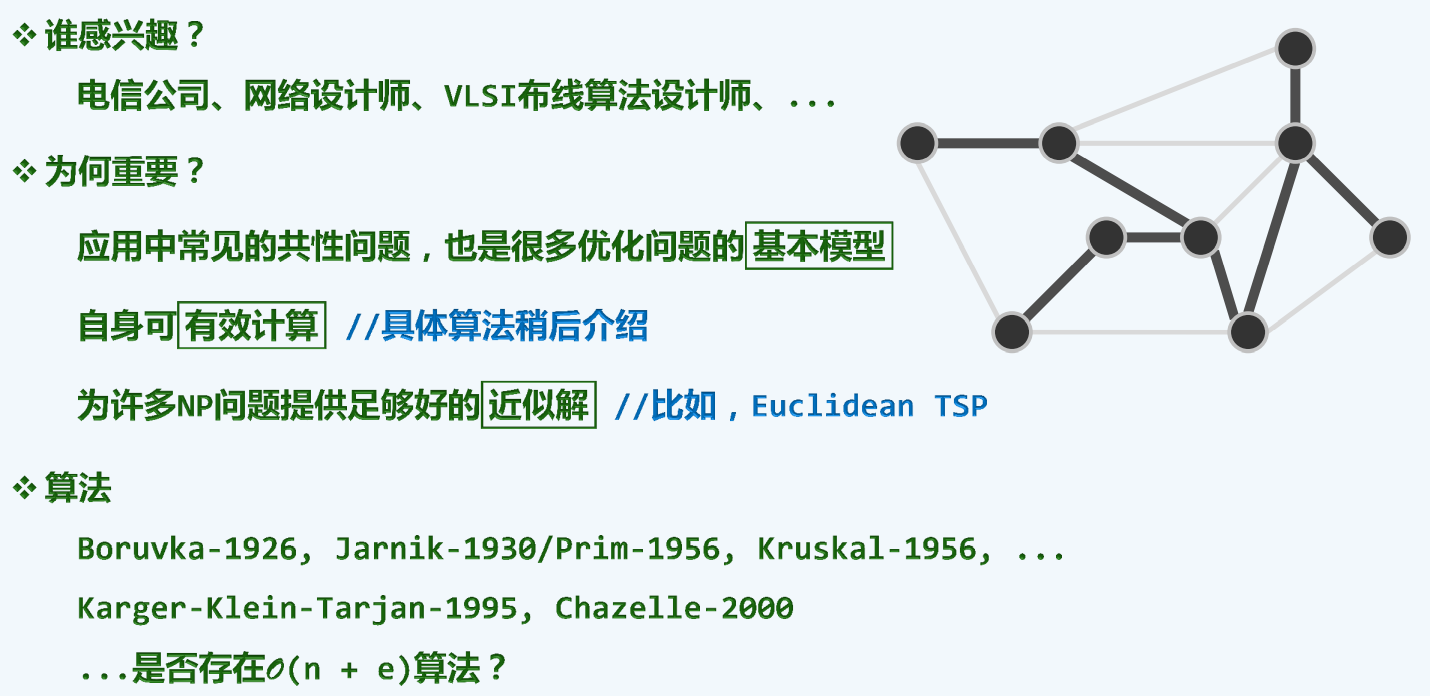
算法实用性
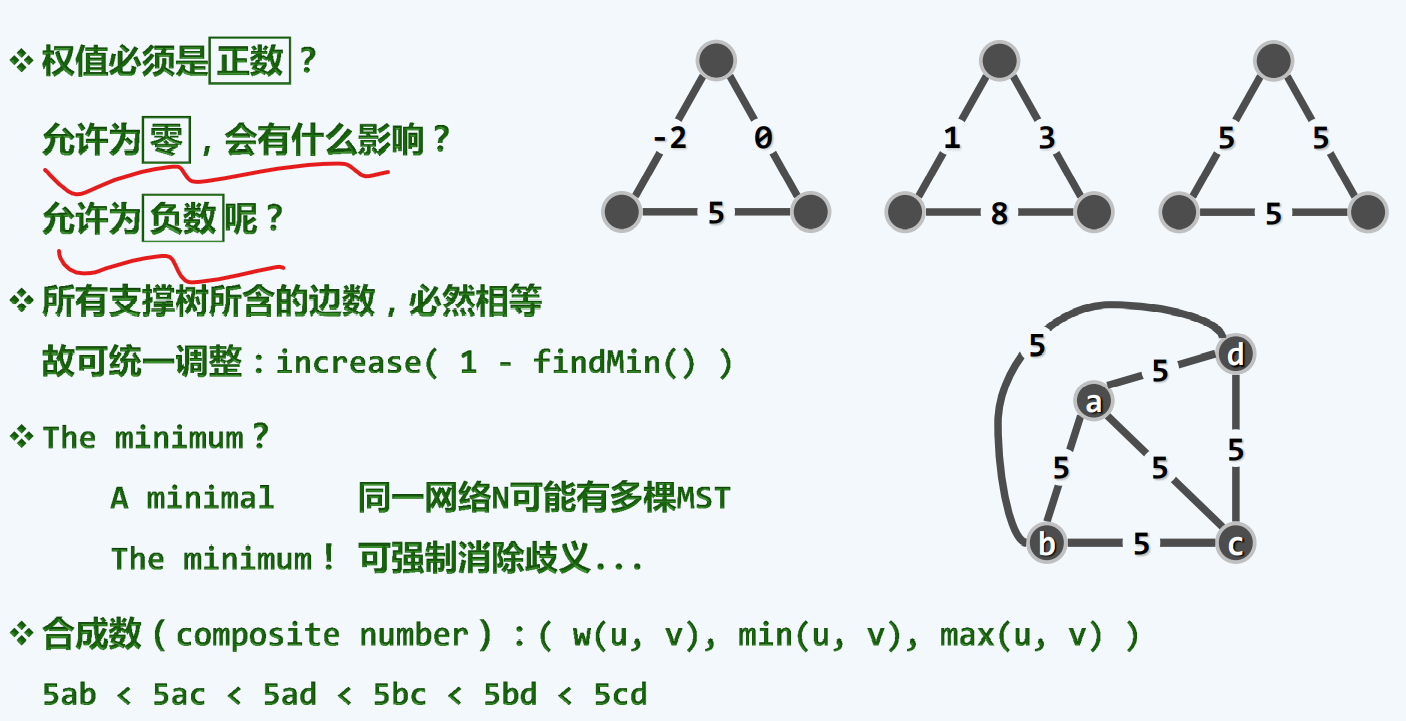
不怕负数,是总体来算的,即便有负边,也一定有最小的负数,那我们可以给他们全部加上这个数,然后全部变成正的,当你运算结束后,再减回去就是
不过,如果有重边,可能会出现多种最小生成方案 所以,实际意义上可以说是minimal而不是minimum
证明
cut只是对顶点集随便的分一下,此/彼 子集/补集
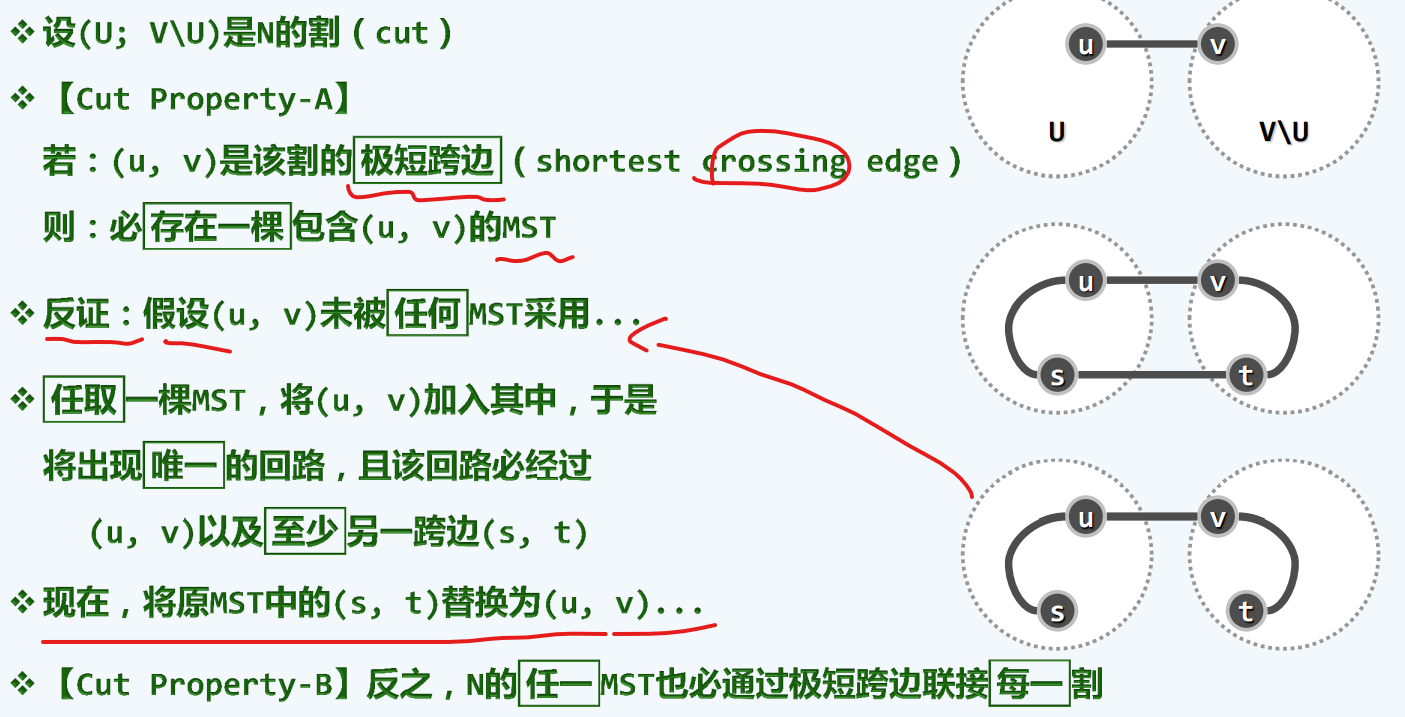
增加矛盾
证明不够严谨
s,u v,t可能是同一个点?
而且,MST隔断之后,未必只有一个跨边,可能会采用bridges
只用最短的就够了,可能同时我们会有更多的
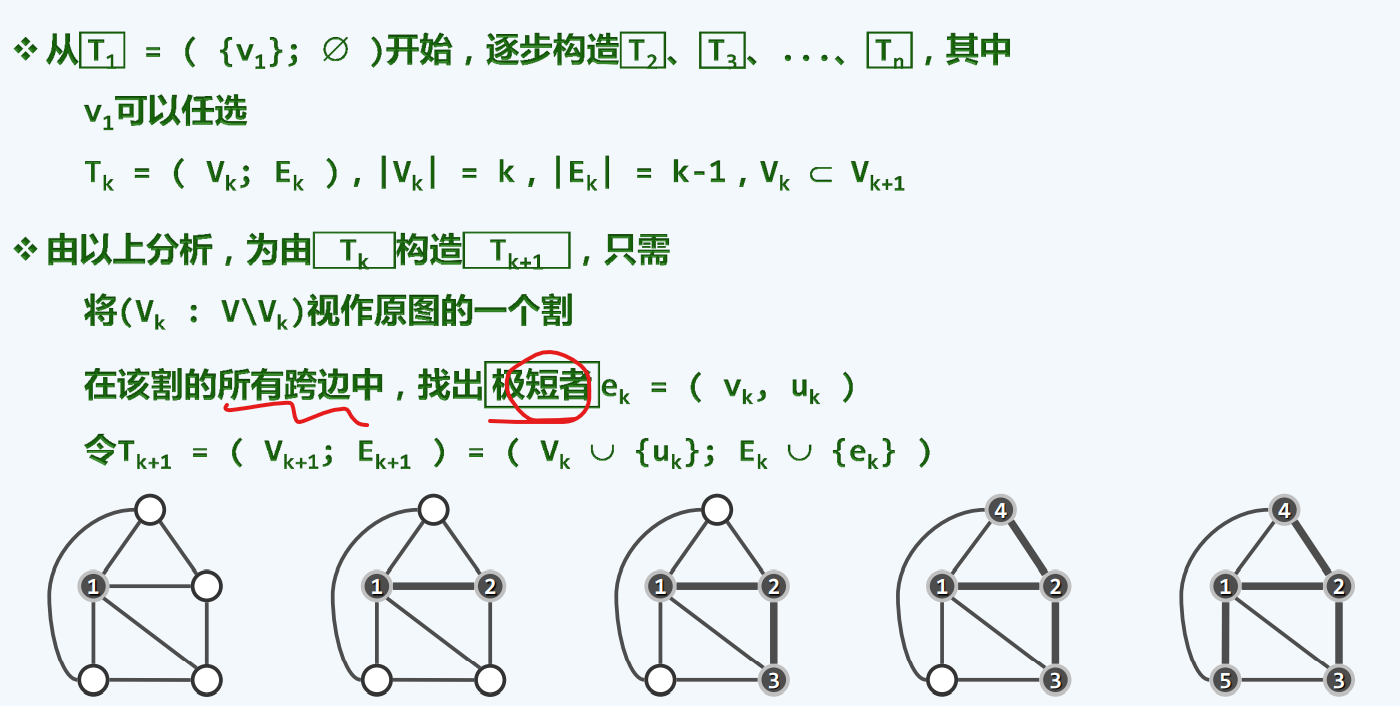
算法
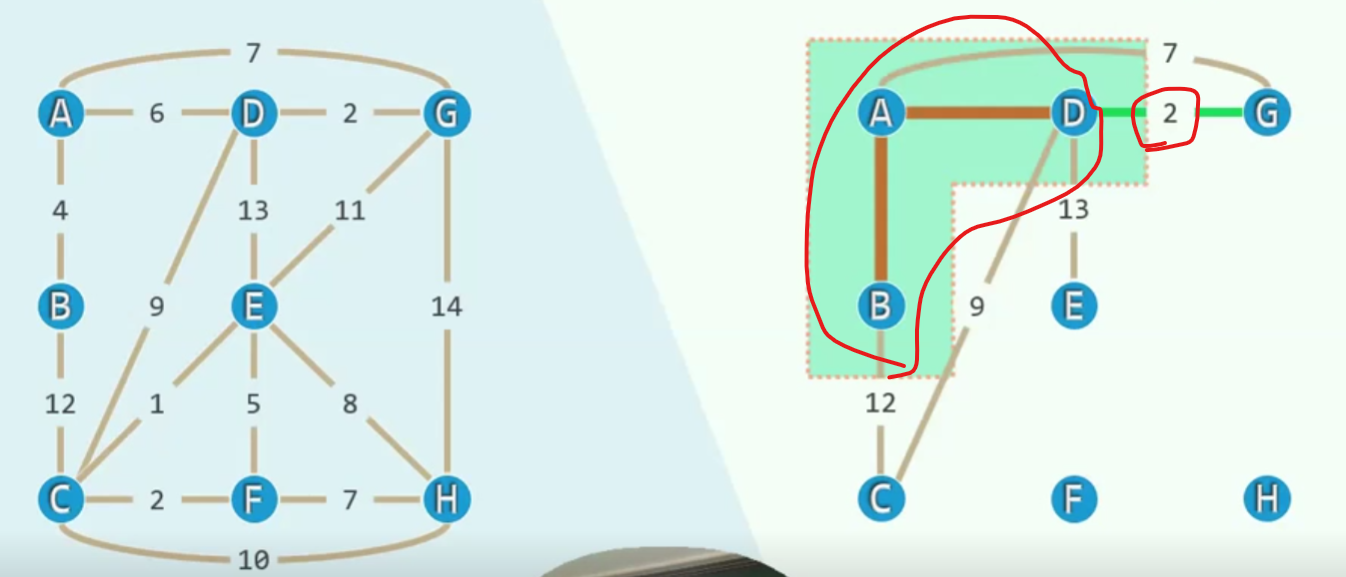
贪心的思想,每次吞进一个,找他们的跨边,找最短的跨边
Correctness
虽然说很幸运,这个算法算出来的是对的,没有漏洞,但是这种思想是有漏洞的,因为比如每一割,可能会产生几条最小权边,也就是最小生成树可能不止一颗,我们试想,比如四大美人,如果我们取每一个的五官中的一部分,组合在一起,那么最后真的一定是美人吗?这里也是一样,不同的最小权边,拼凑起来,还真不一定是最后的最小的,不过很幸运(再次)这里确实是对的!
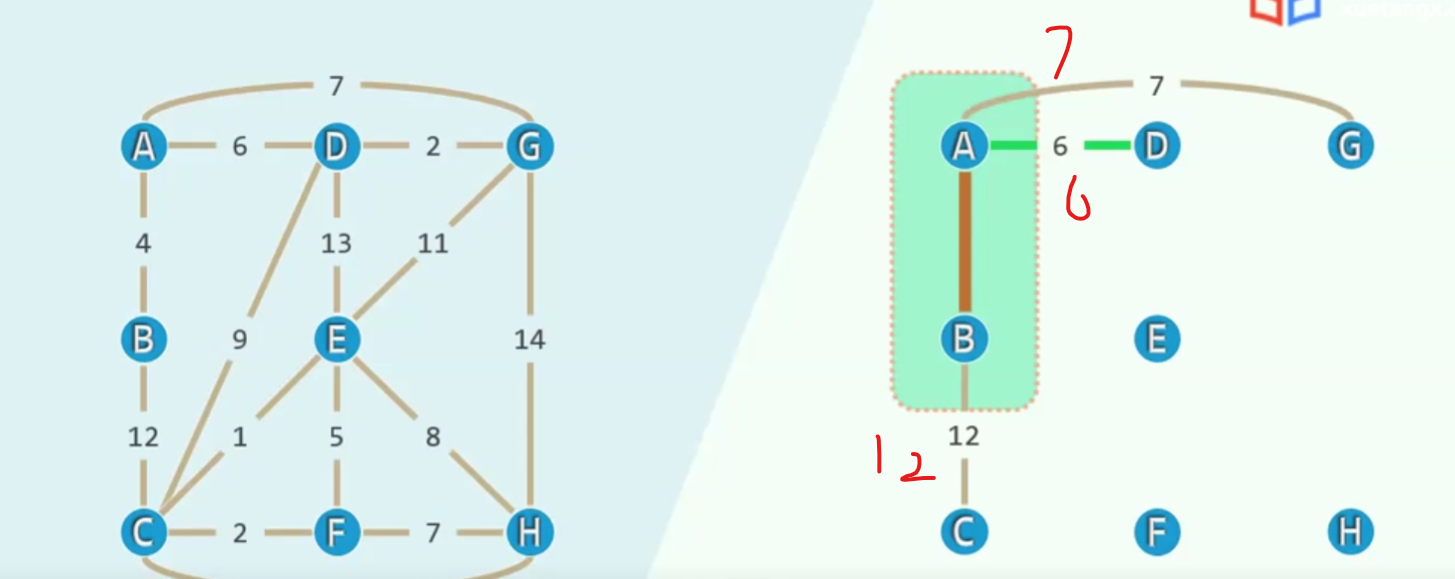
Priority = Distance
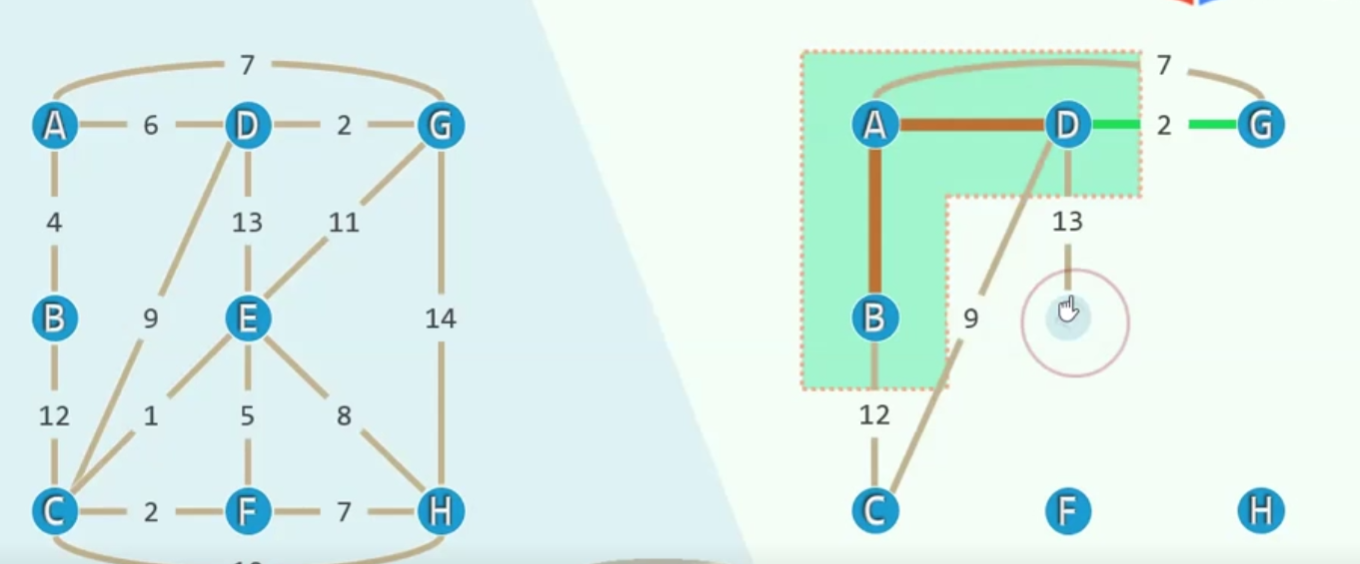
对于E来说(鼠标位置)与其说那条边是13,不如说当前他的优先级是13(优先级在这里越小越好)对于G,它之前的优先级是7(之前还没有加入D)现在优先级变成了2
所以说,这个优先级是会变动的,欣然的更新
Implementation
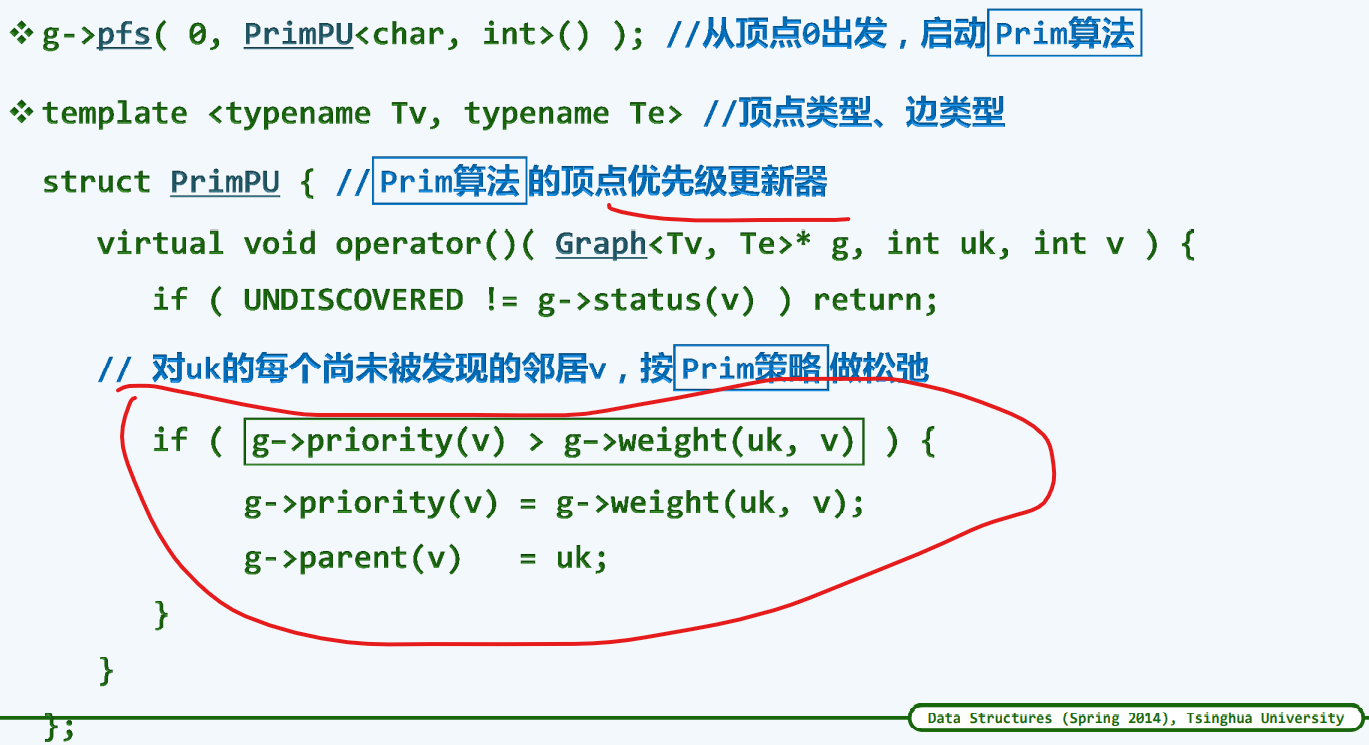
更新器-prim
与kstra的差别仅仅一行半
重载括号(含这个传参列表的括号)
代码–PFS
1 | template <typename Tv, typename Te> template <typename PU> //优先级搜索(全图) |
 微信
微信 支付宝
支付宝