以下笔记为jjyaoao本人制作,欢迎借鉴学习和提出相关建议,转载需要标明出处www.jjyaoao.space
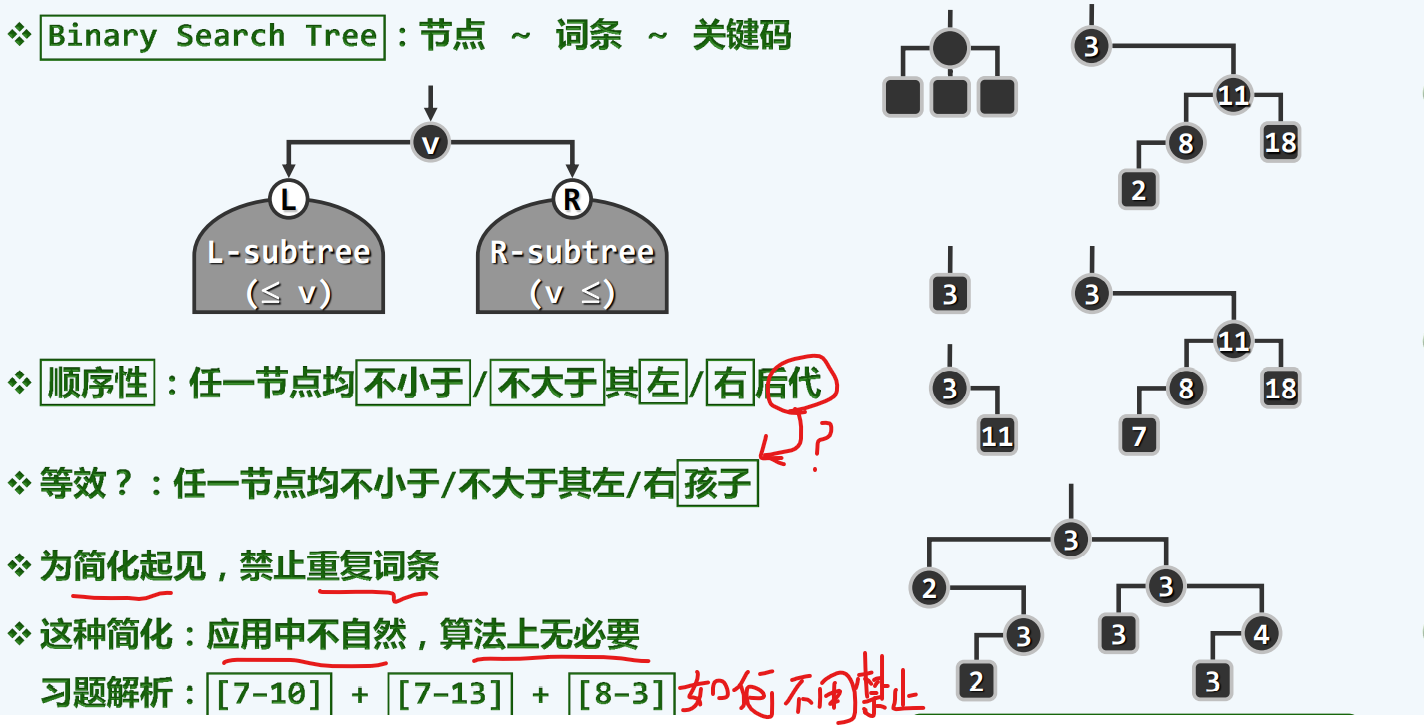
二叉搜索树
寻关键码访问
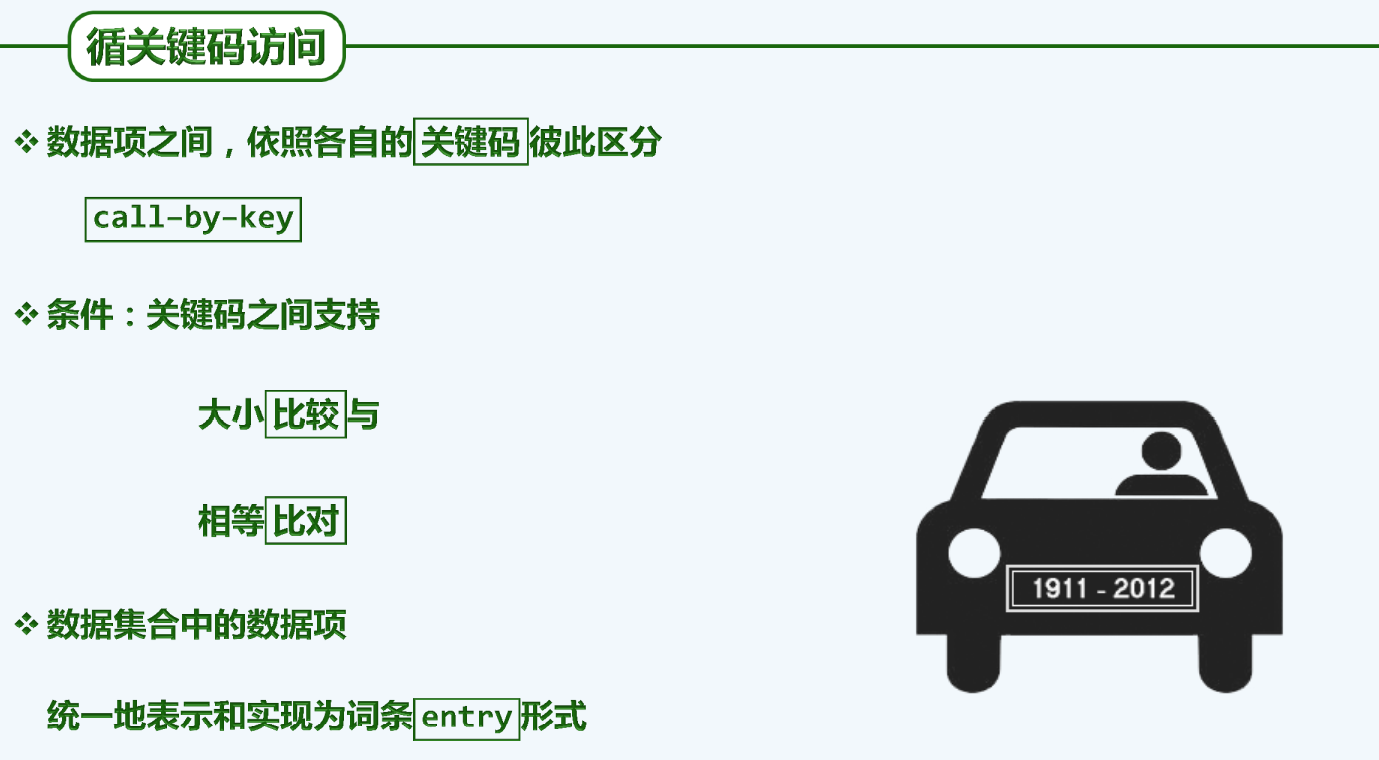
有序性
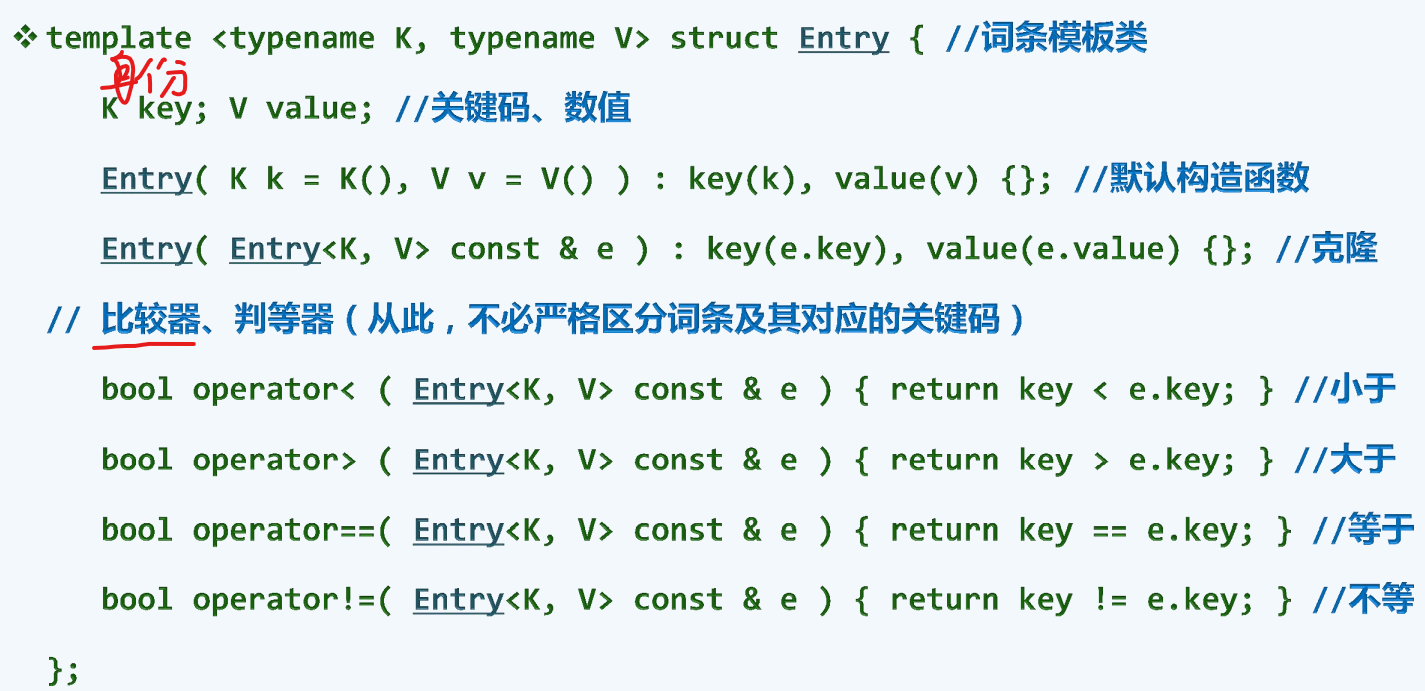
为了简单而言 节点 = 词条 = 关键码
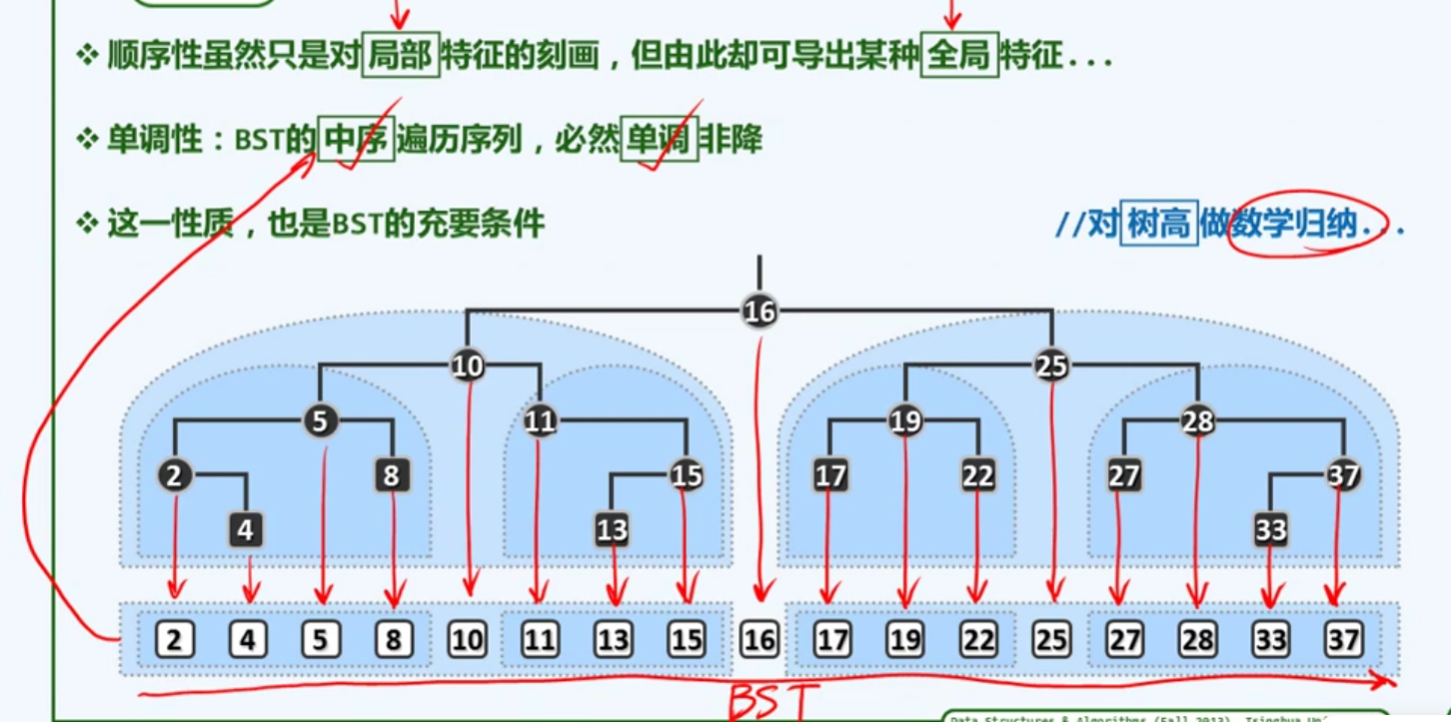
单调性
在微观上处处满足顺序性,宏观上每一个的垂直投影,满足单调性
ADT
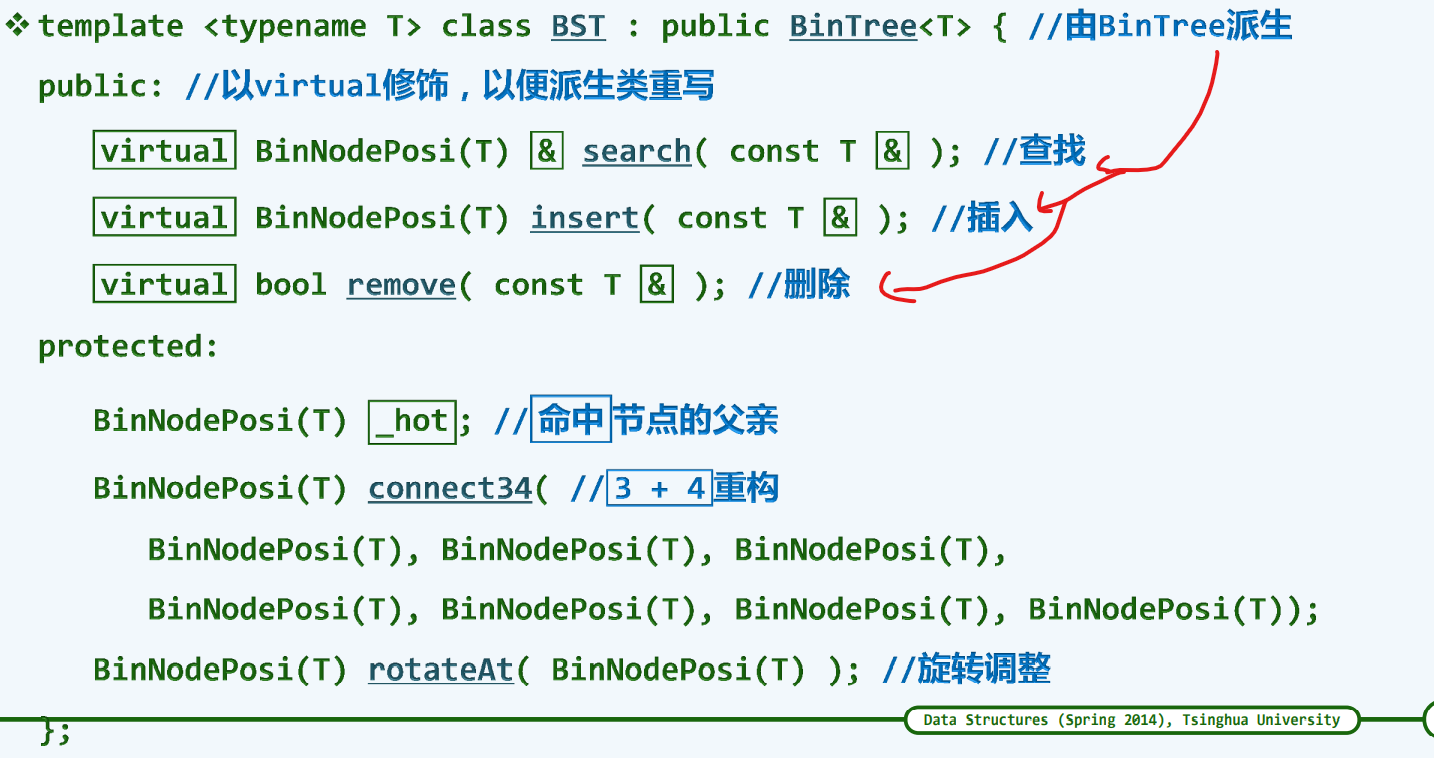
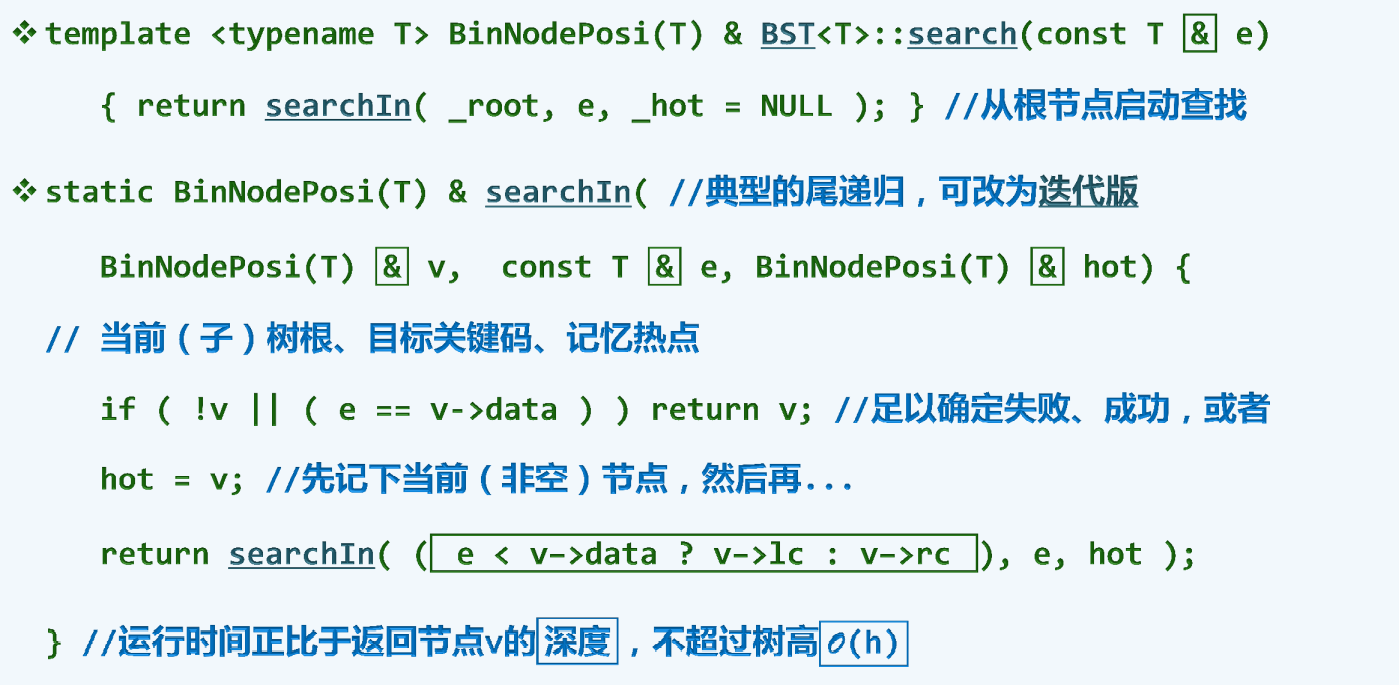
查找
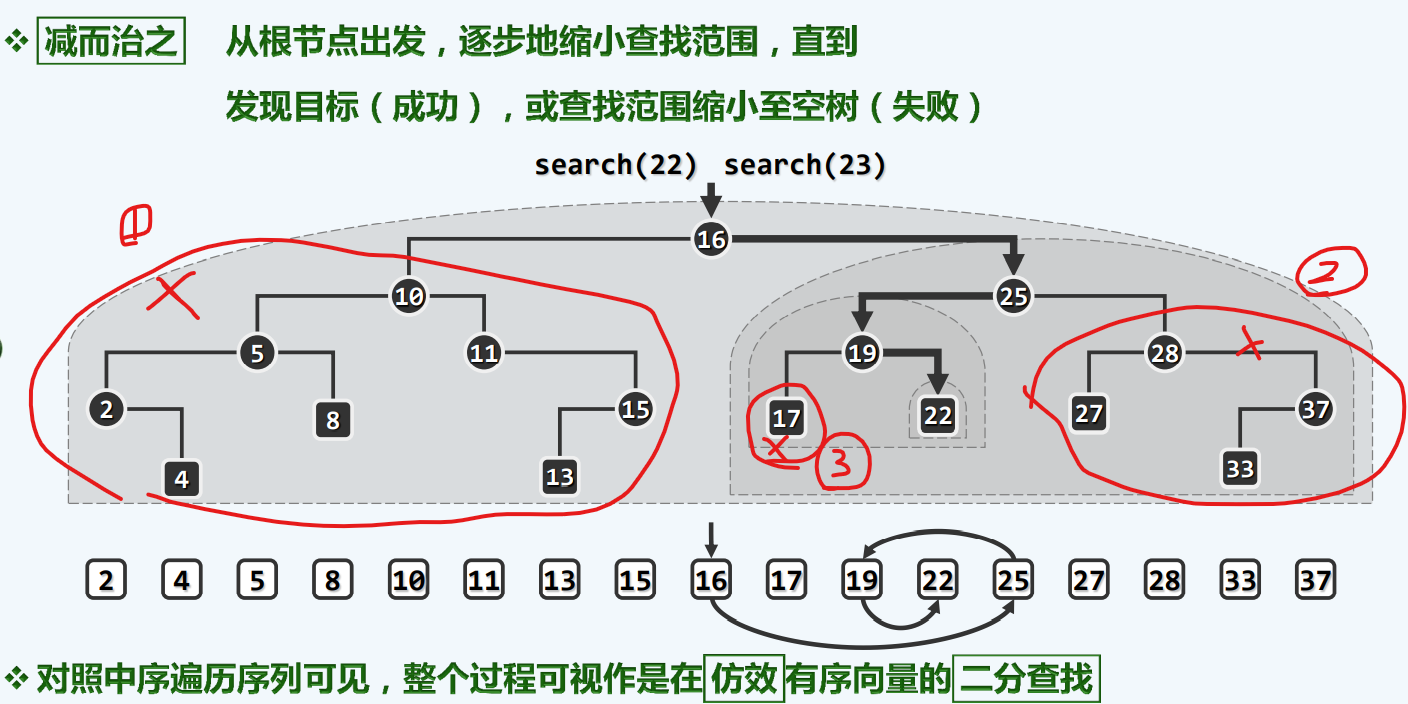
可以看到,和二分查找过程相仿
1
2
3
4
5
6
7
| template <typename T> BinNodePosi<T> & BST<T>::search ( const T & e ) {
0010 if ( !_root || e == _root->data ) { _hot = NULL; return _root; }
0011 for ( _hot = _root; ; ) {
0012 BinNodePosi<T> & v = ( e < _hot->data ) ? _hot->lc : _hot->rc;
0013 if ( !v || e == v->data ) return v; _hot = v;
0014 }
0015 }
|
*两种表现形式*,下面一种更易理解
每运行一次,下降一层
hot会记下此前访问过的非空节点,总体而言,hot最终将会指向谁呢?
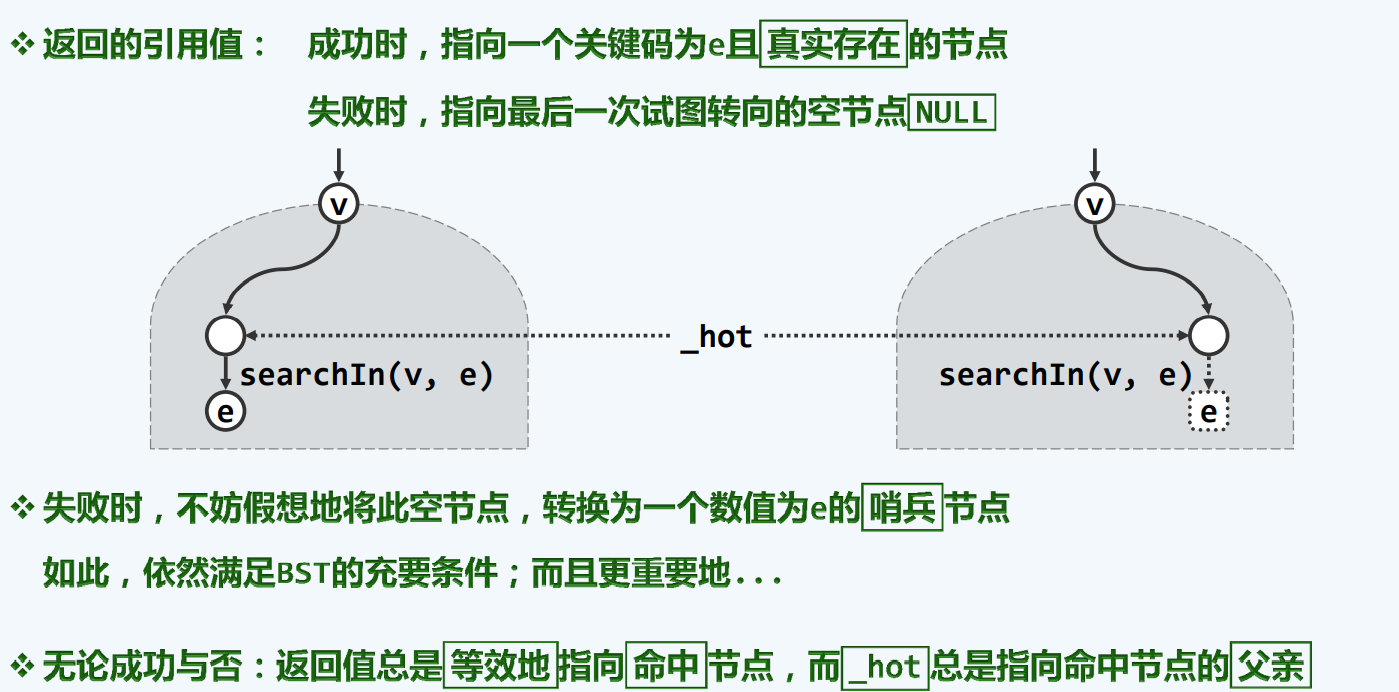
我们引入一个假想的哨兵(上图右边的e),它的位置在我们树的叶节点的下一位,我们可以看到,如果我们引入之后,这个BST仍然是合法的,更重要的是,它让我们的hot语义变得完整起来,也就是,无论如何,hot总是能指向命中节点的父亲。
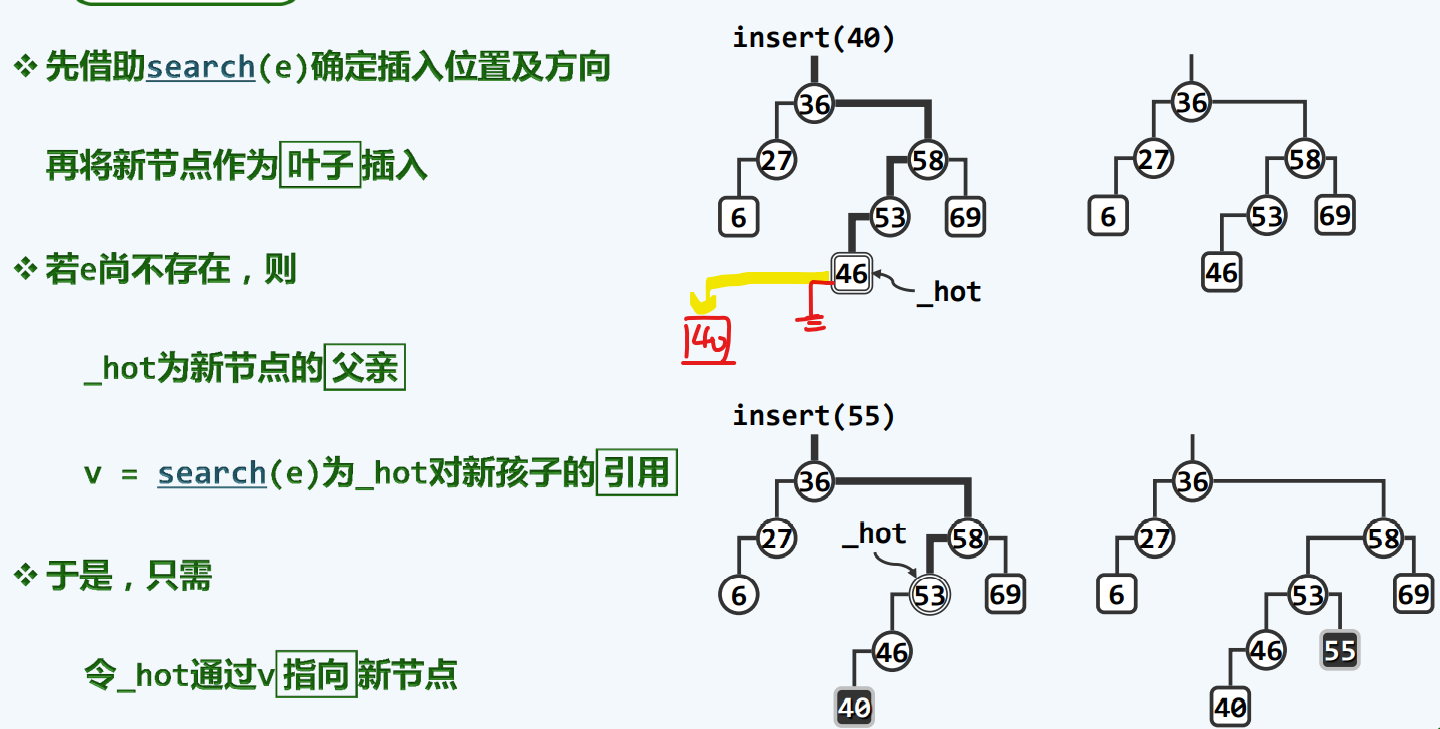
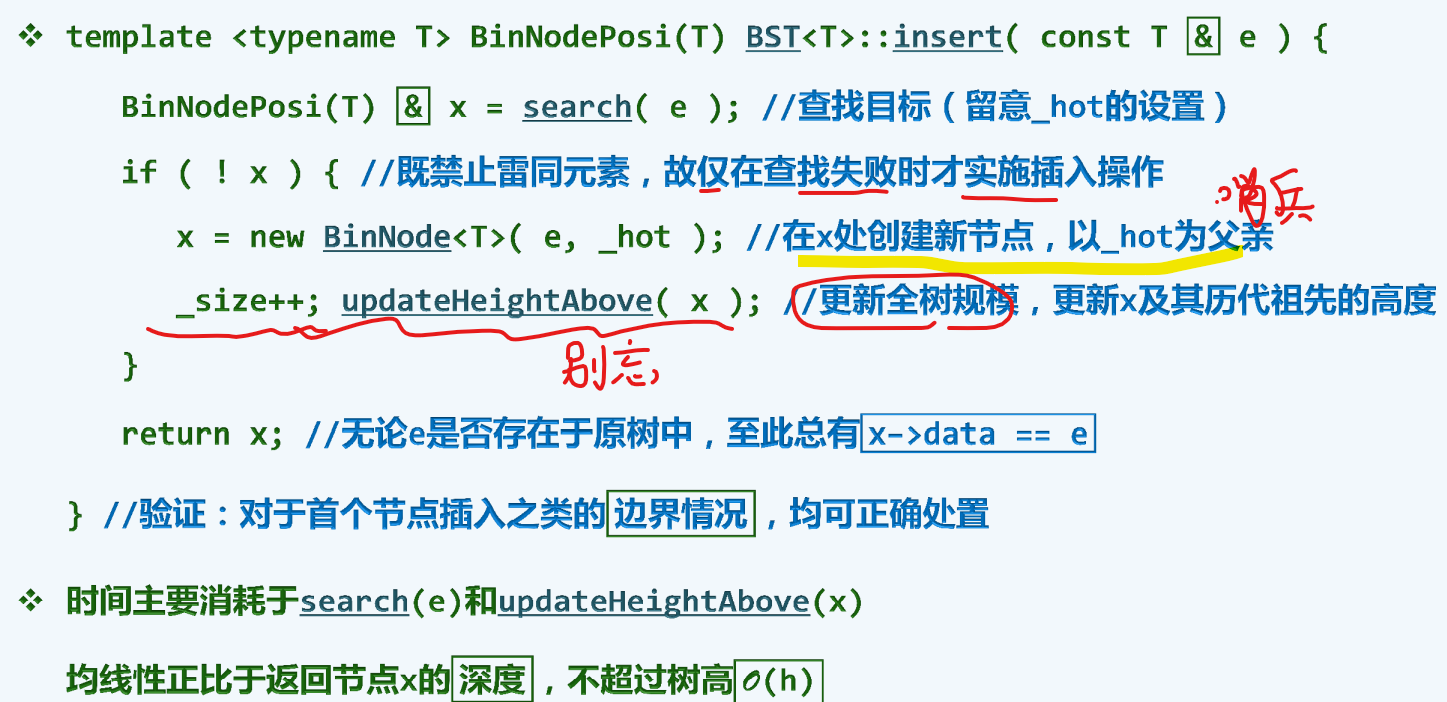
插入
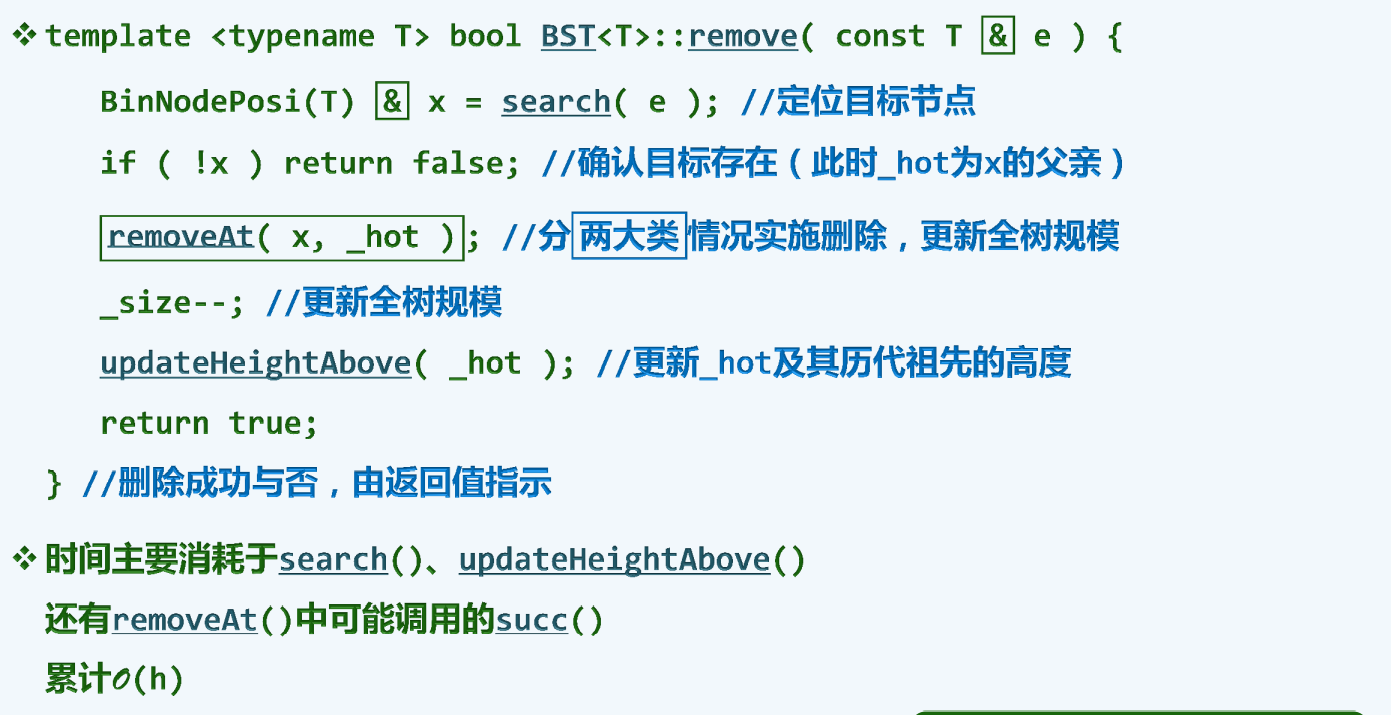
删除
if x 不存在 那么 退出删除 和插入正好对称,接下来的问题是removeAt可能需要处理哪几种情况,各种情况又当如何应对呢
单分支删除
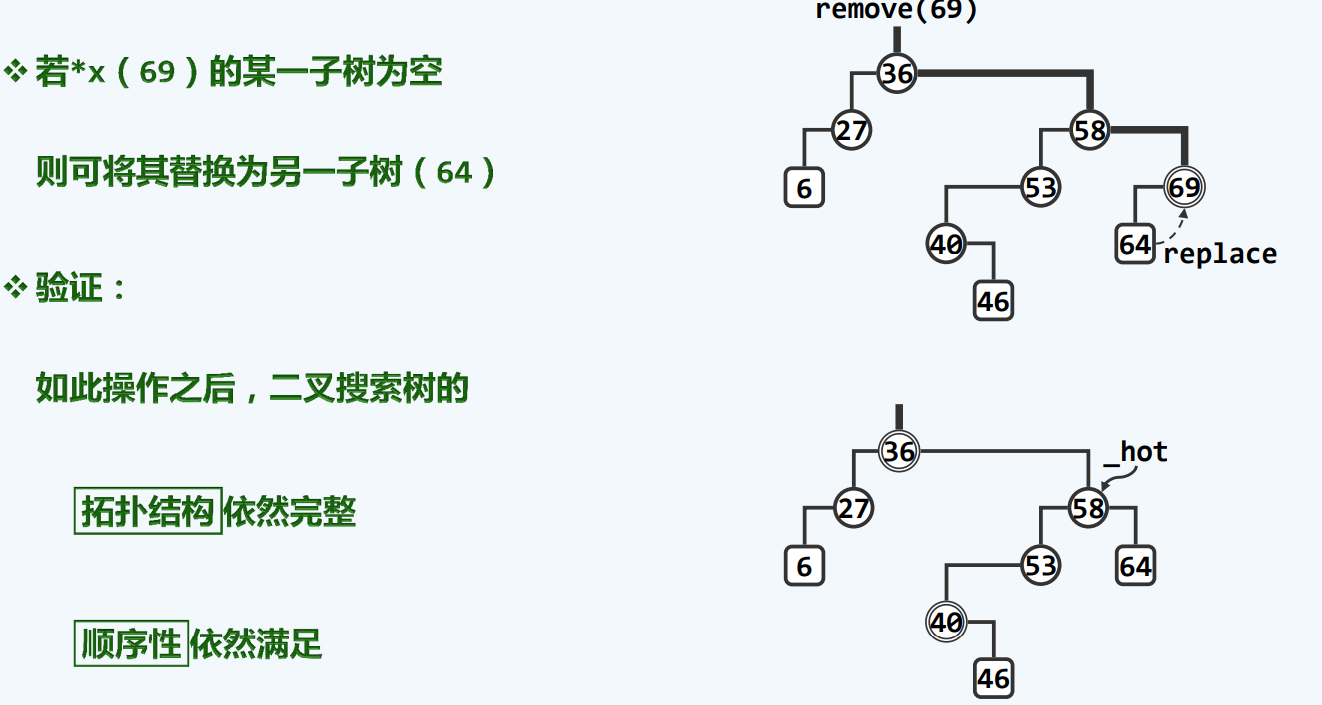
实现
双分支删除
化繁为简!
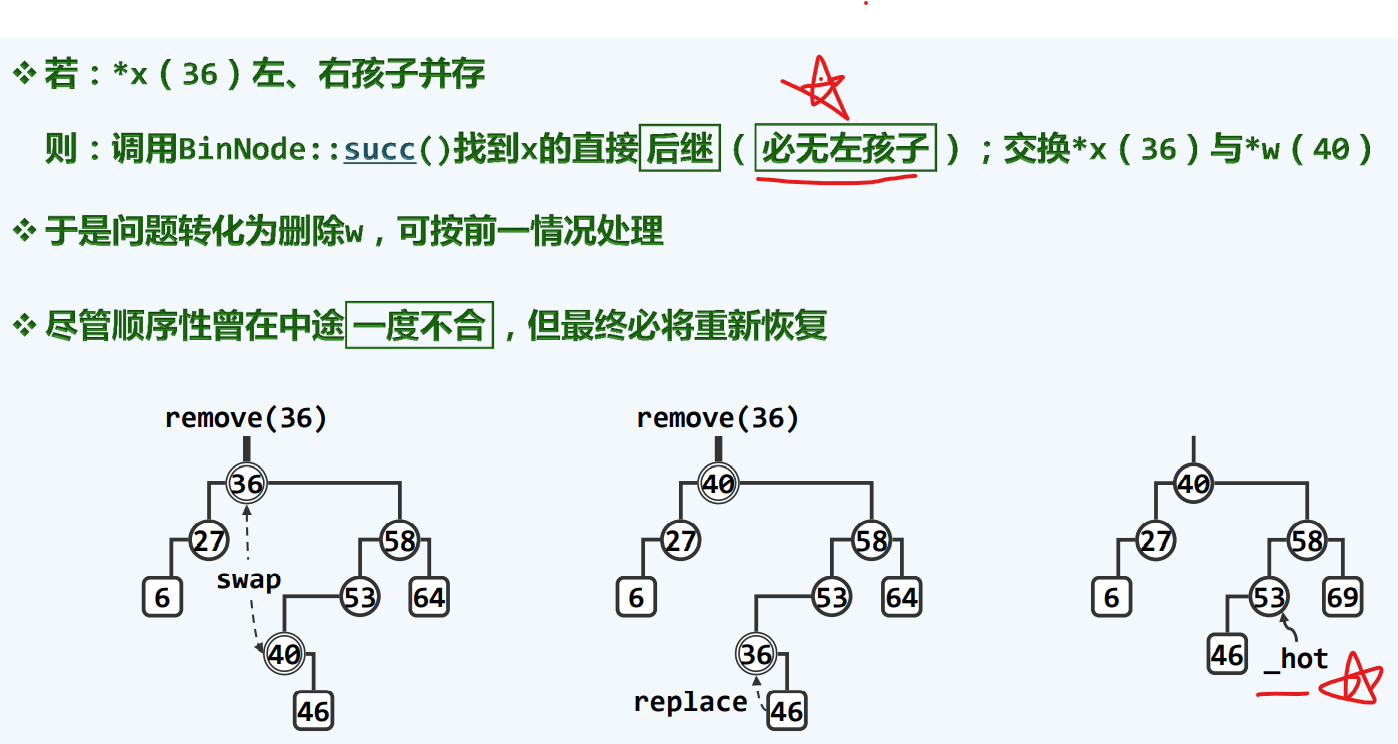
必无左孩子(因为直接后继一定是右孩子的最左边的左子代
需要说明的是,hot需要在删除完节点后更新为刚刚被实际删除节点的父亲节点,并且向上遍历,因为有可能祖先的高度会发生变化(因为后代的删除)
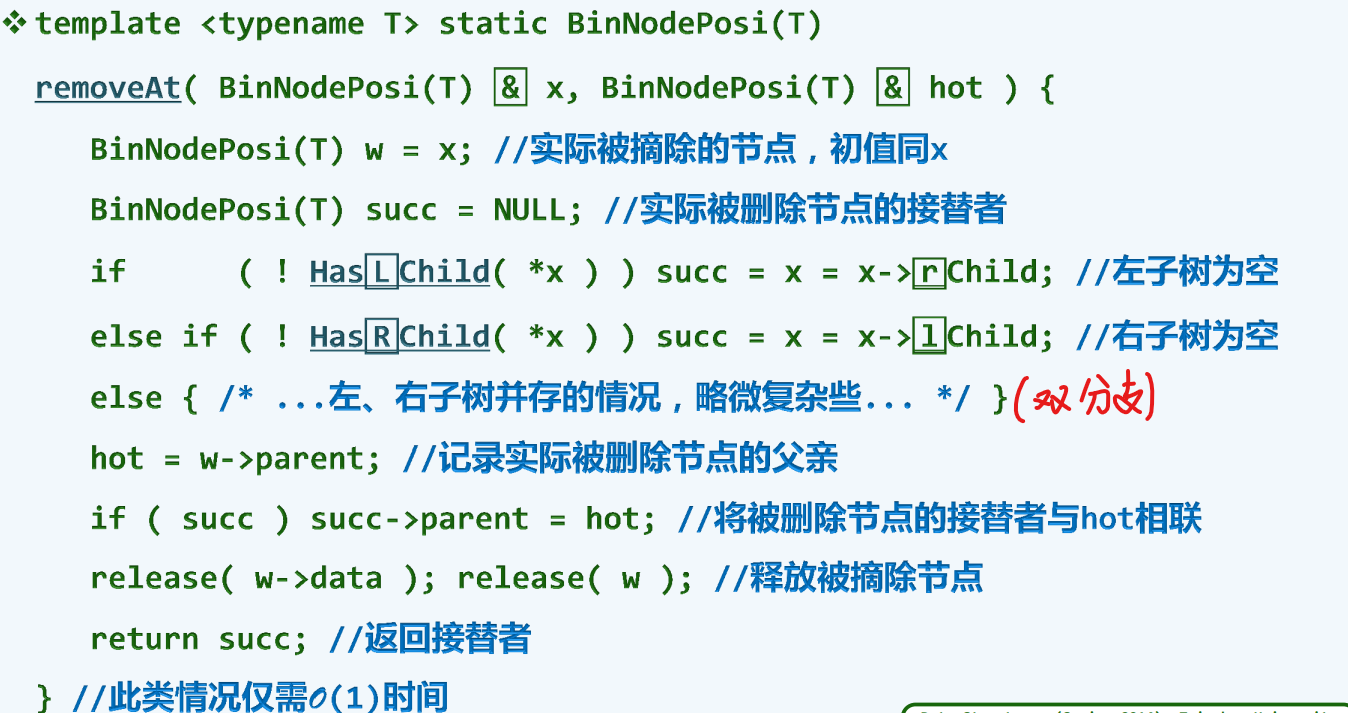
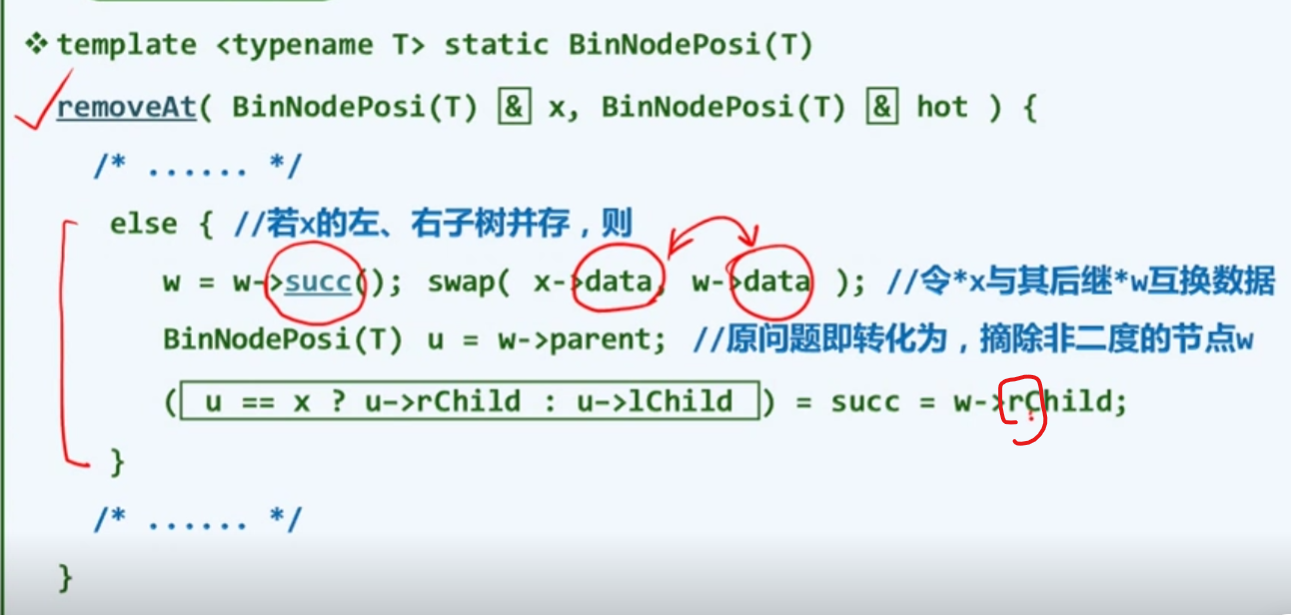
实现
首先找到待删除节点的直接后继,令他和待删除节点交换,等效的将待删除的节点转移到新的位置,并且至多只有一个分支,当然,这个节点一定只有右孩子(或者没有孩子
我们现在只需要在他和祖父之间正确的完成一次双向连接
w为待删除数据,x为它的直接后继
后面那一句三元即为桥梁,将w在这个BST树里剔除掉
SUCC()
1
2
3
4
5
6
7
8
9
10
11
| template <typename T> BinNodePosi<T> BinNode<T>::succ() {
0002 BinNodePosi<T> s = this;
0003 if ( rc ) {
0004 s = rc;
0005 while ( HasLChild ( *s ) ) s = s->lc;
0006 } else {
0007 while ( IsRChild ( *s ) ) s = s->parent;
0008 s = s->parent;
0009 }
0010 return s;
0011 }
|
removeAt ()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| template <typename T>
0007 static BinNodePosi<T> removeAt ( BinNodePosi<T> & x, BinNodePosi<T> & hot ) {
0008 BinNodePosi<T> w = x;
0009 BinNodePosi<T> succ = NULL;
0010 if ( !HasLChild ( *x ) )
0011 succ = x = x->rc;
0012 else if ( !HasRChild ( *x ) )
0013 succ = x = x->lc;
0014 else {
0015 w = w->succ();
0016 swap ( x->data, w->data );
0017 BinNodePosi<T> u = w->parent;
0018 ( ( u == x ) ? u->rc : u->lc ) = succ = w->rc;
0019 }
0020 hot = w->parent;
0021 if ( succ ) succ->parent = hot;
0022 release ( w->data ); release ( w ); return succ;
0023 }
|
复杂度
我们观察,BST的删除操作,所需要的时间主要来源于更新祖先高度,和找到直接后继,经过推理验证,不难得出,两者都不会超过O(h)的复杂度,因此,删除算法和插入一样,都是O(h)的复杂度,
那么,这个结论,是好还是不够好呢?
我们将进行进一步探讨(后续
平衡与等价
极端退化
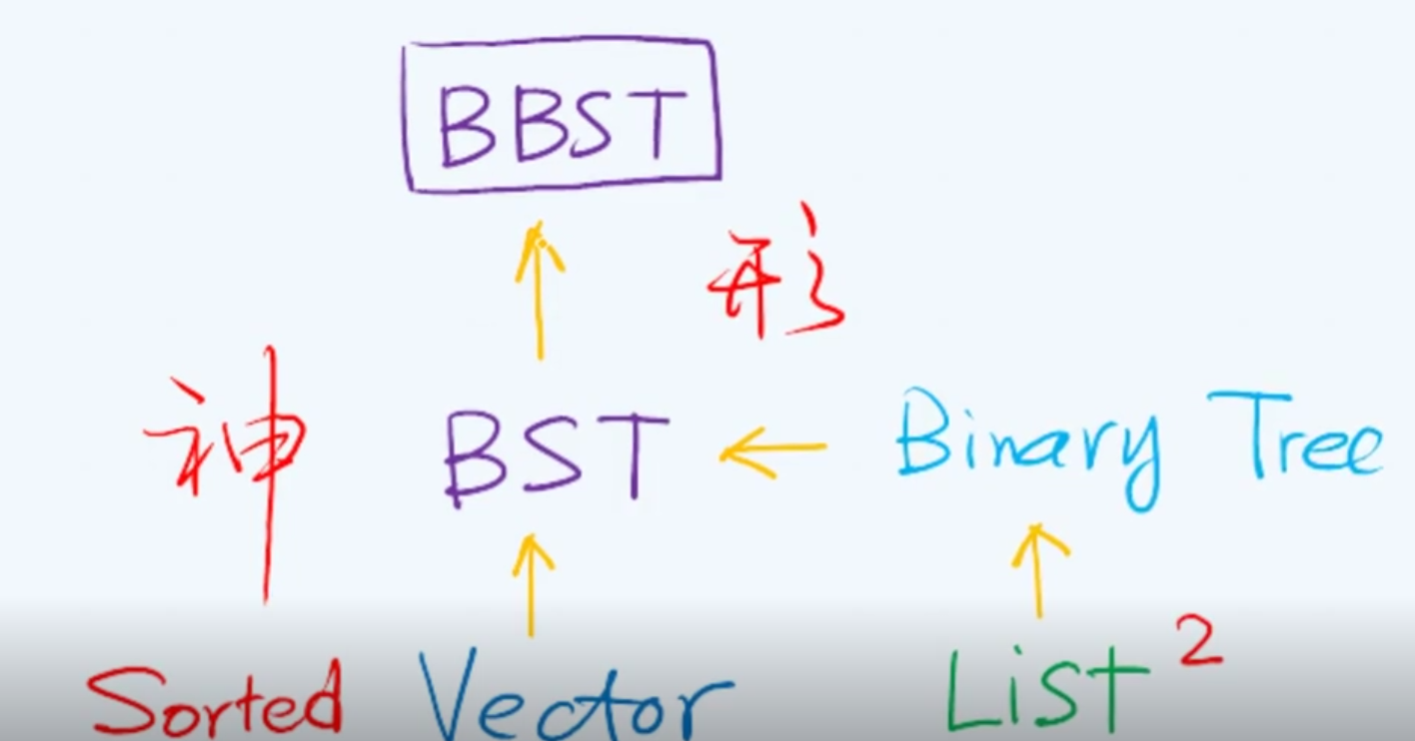
BST = List + Vector
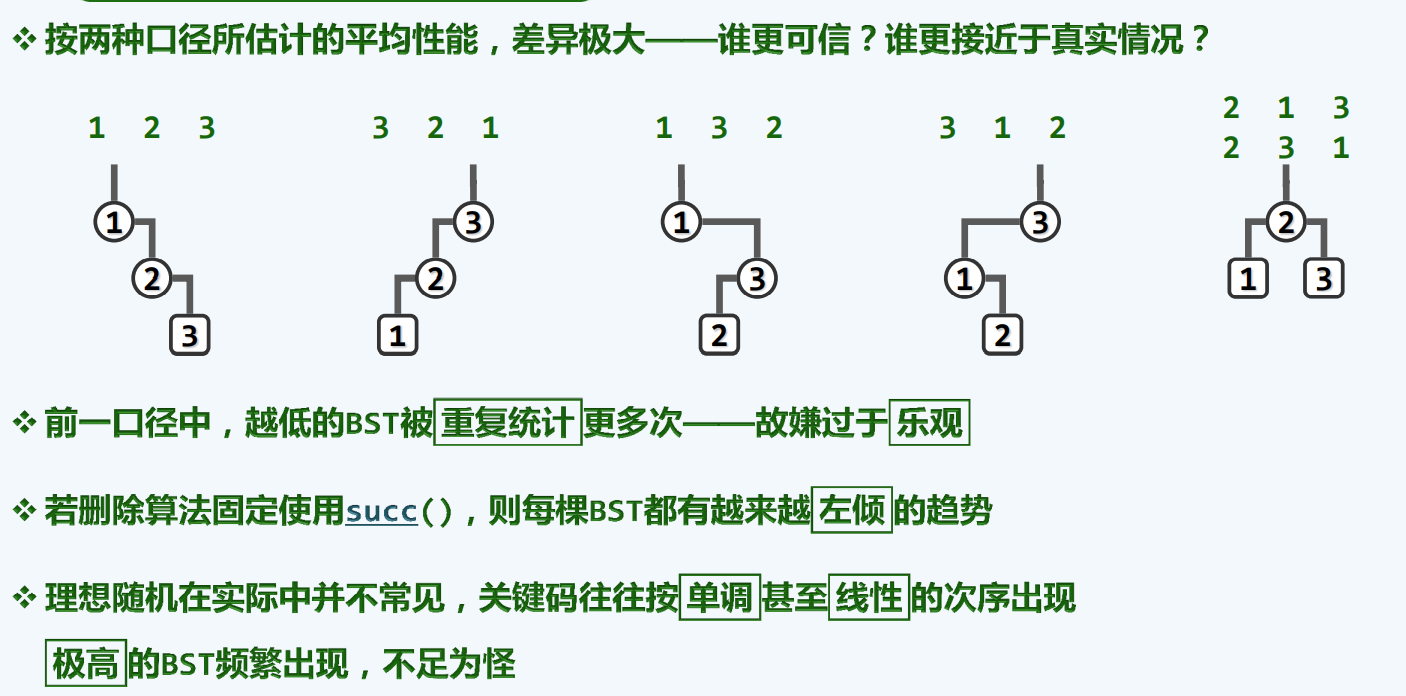
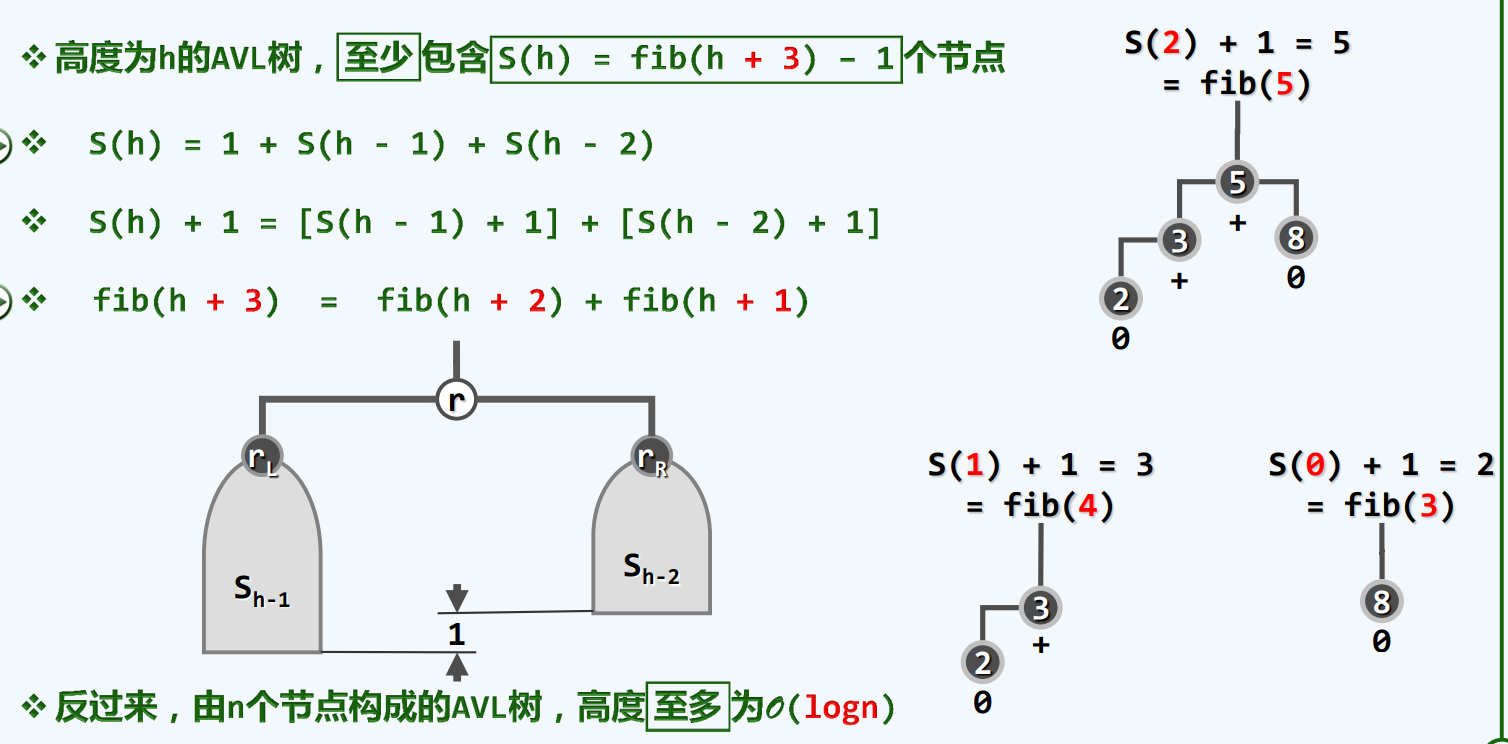
平均高度
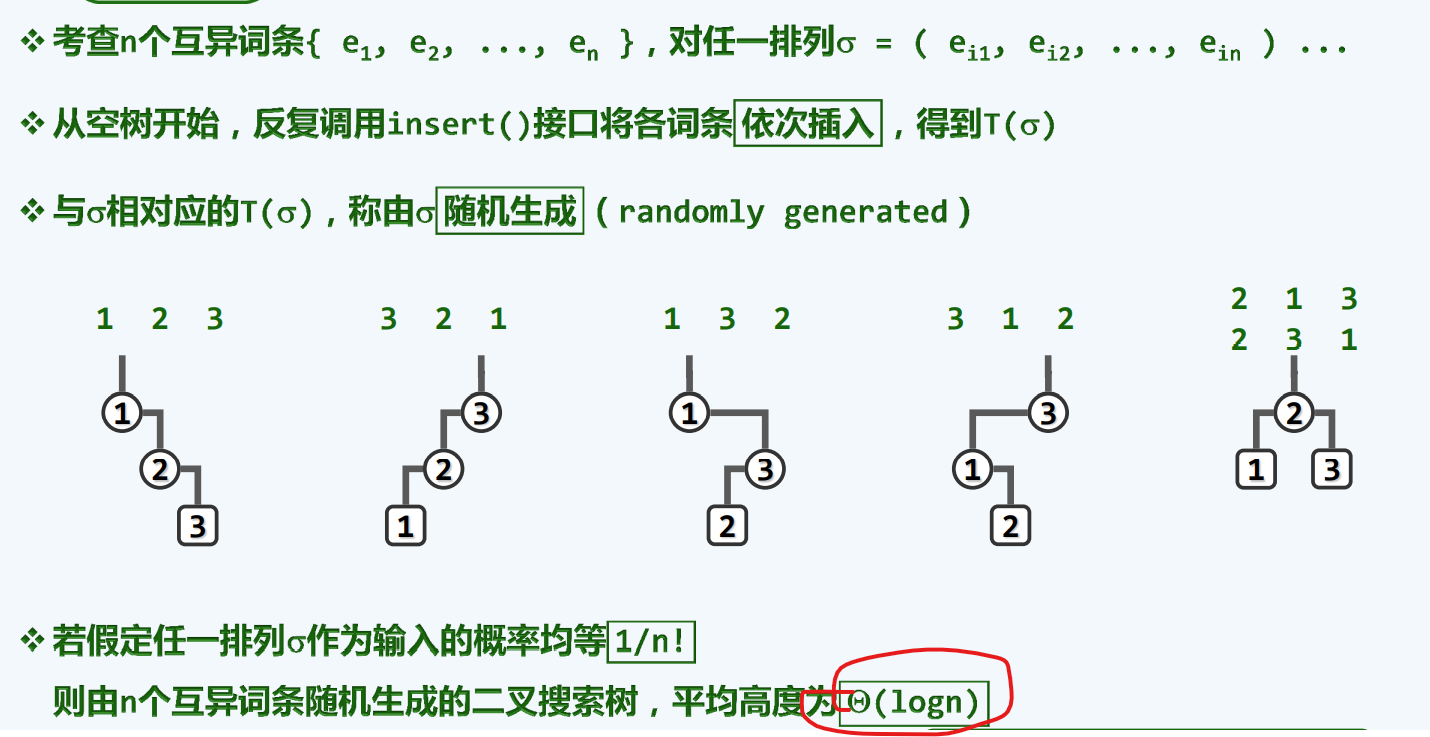
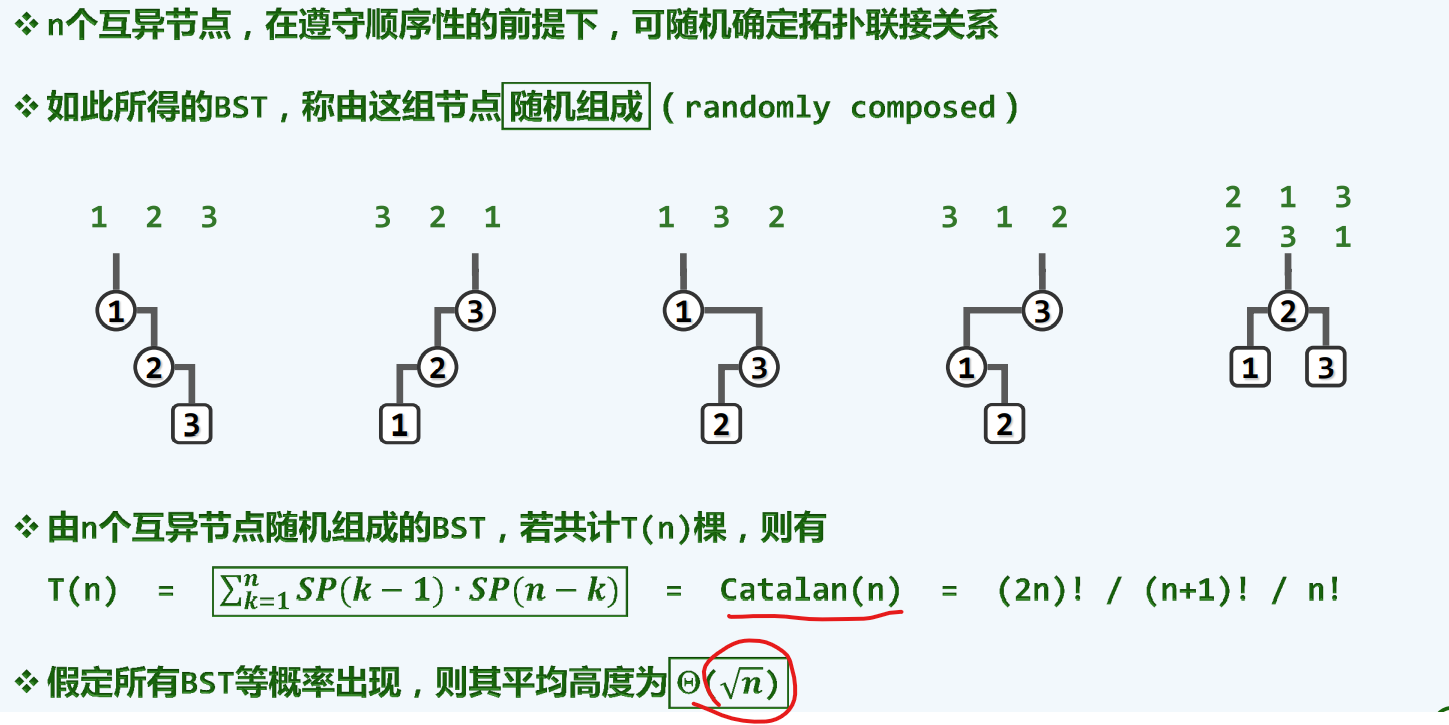
n!和卡特兰数,谁的统计更为准确呢?我们认为,是Catalan数,因为n!统计会有重复,因为在前一统计口径所得到的估算值,在高度更小的时候,会出现更多的重复(比如2 1 3 ,2 3 1)这也使得,重复在高度低的位置充作统计对象,这也是它为什么会统计的平均高度更小的原因
从这一观点来看,logn过于乐观了,根号n也许更加可信
为了控制树高,我们也许应该做点什么,同时,我们也可以发现,我们需要采取一系列的技巧
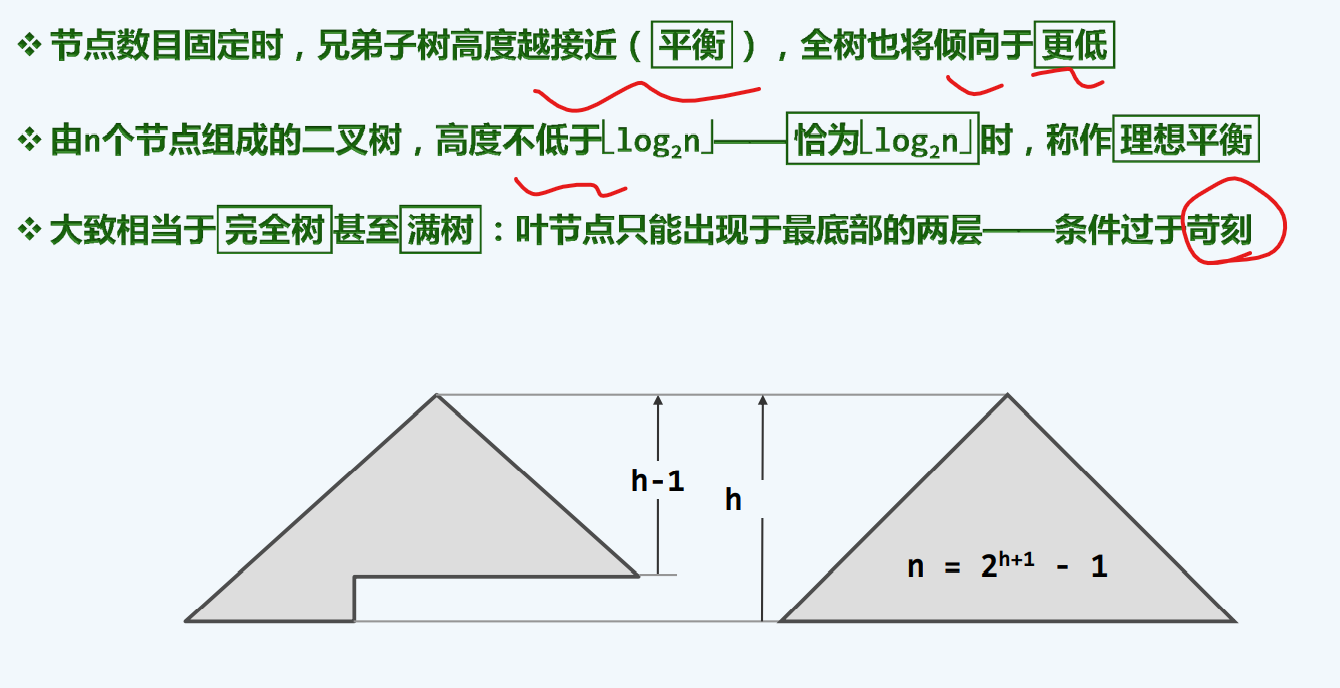
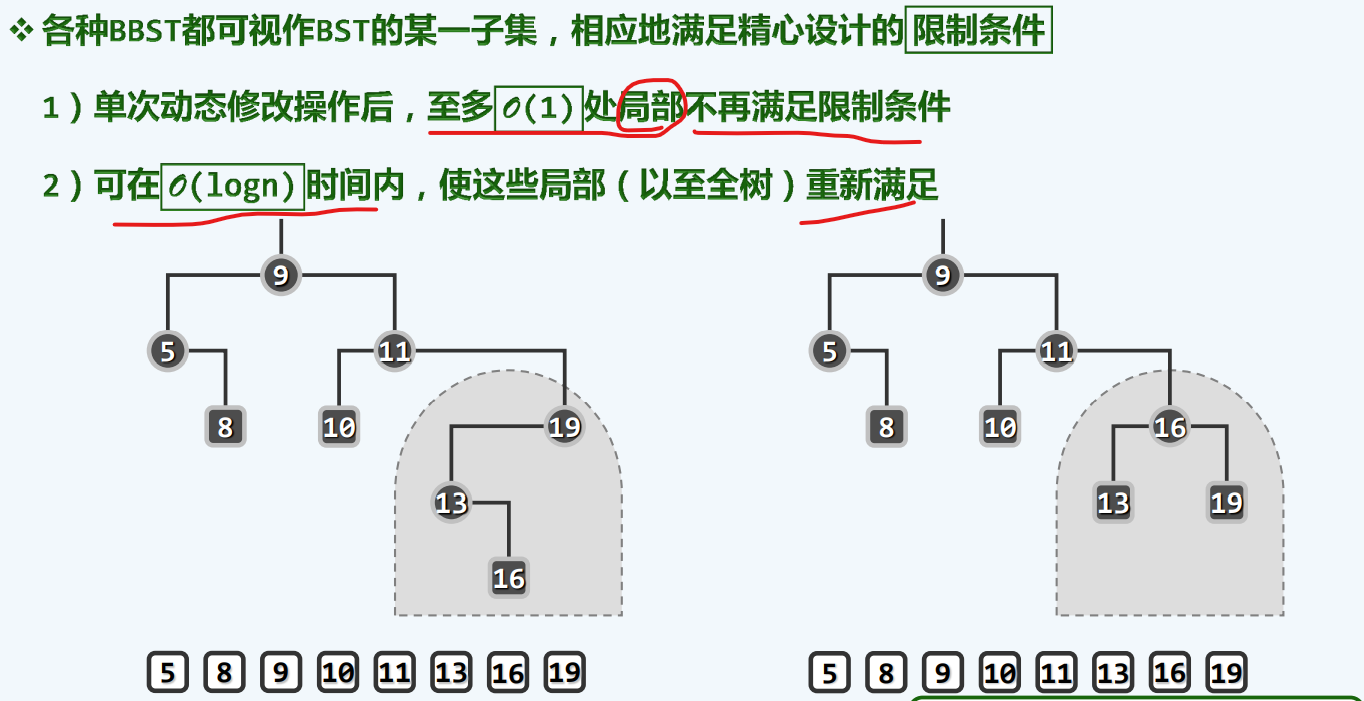
理想+适度
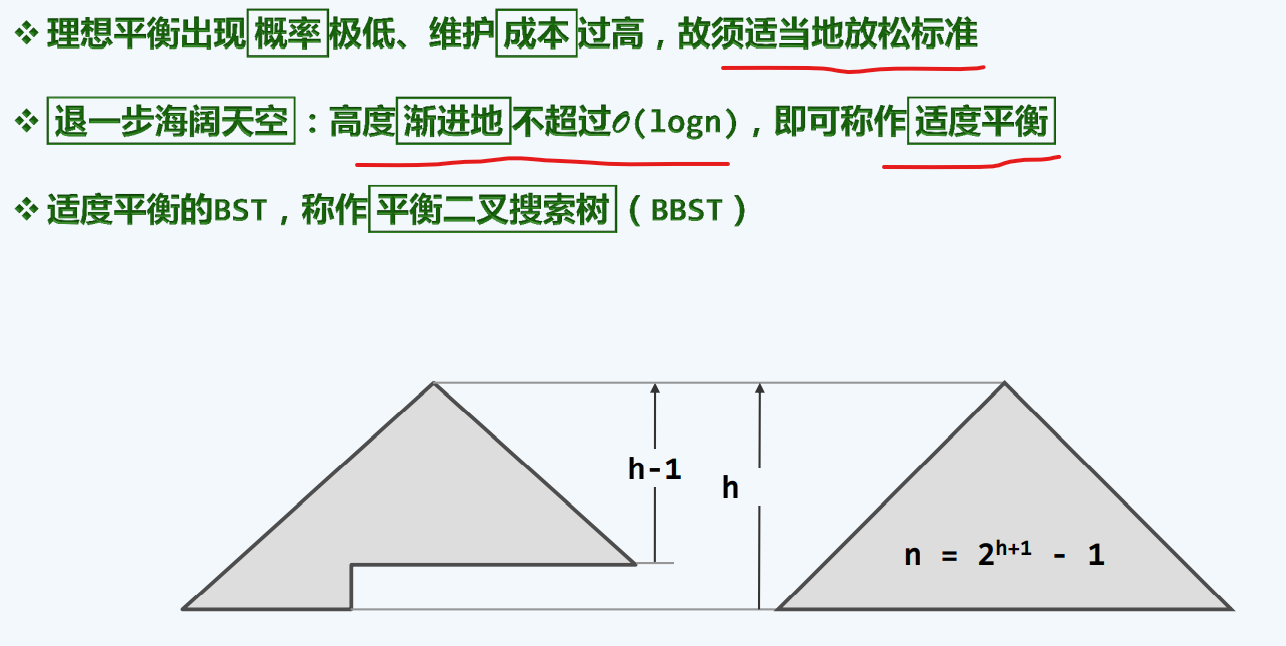
而这种适度平衡的树,我们就把他叫做 BBST
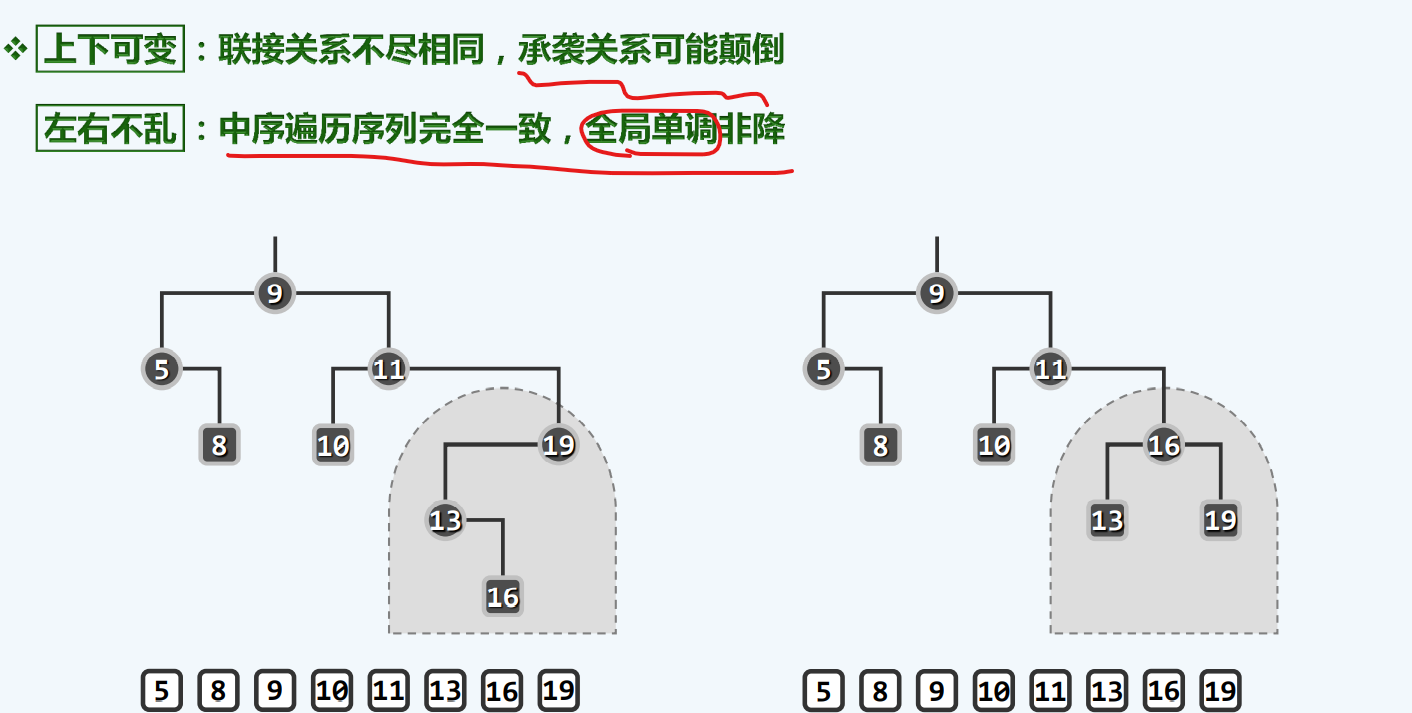
歧义=等价
全局上任然是BST
在微观上可以改变
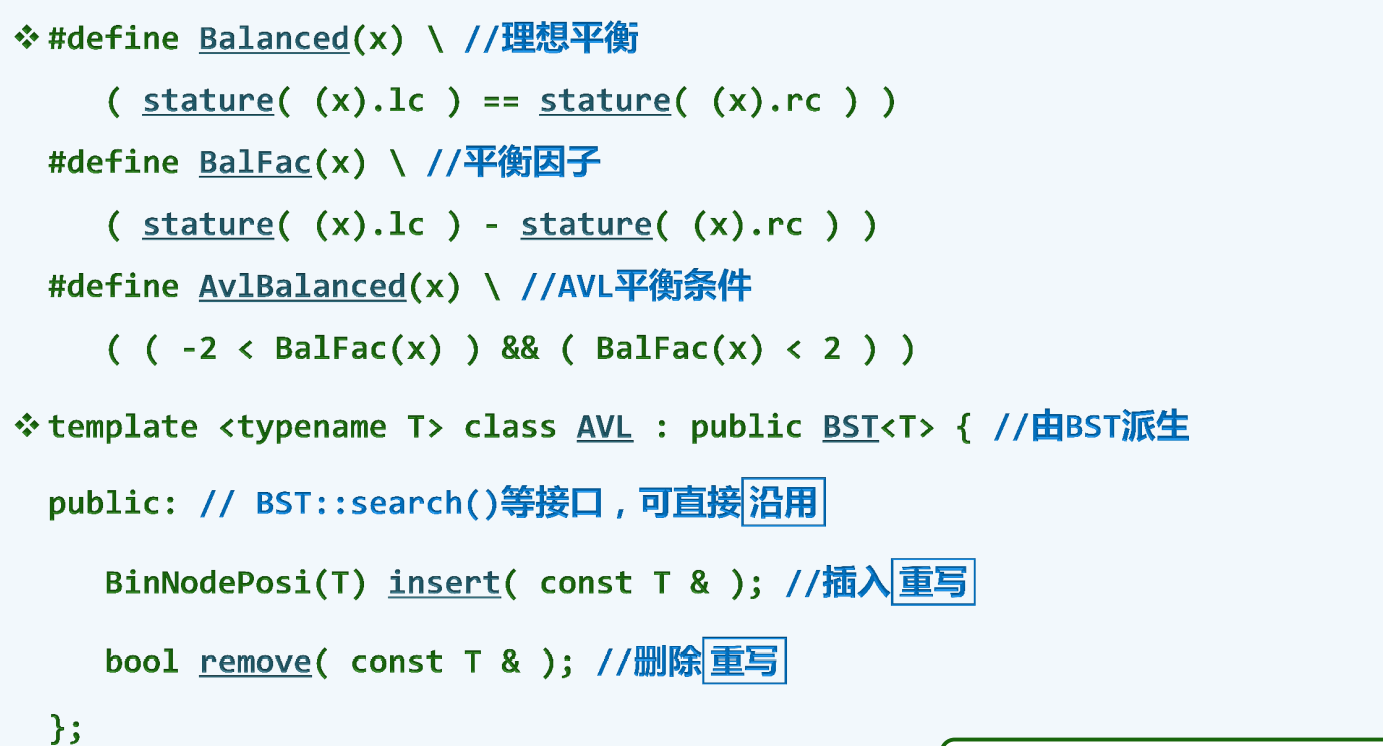
AVL
了解就好,已经过时
平衡因子
balfac()
一种适度的平衡标准
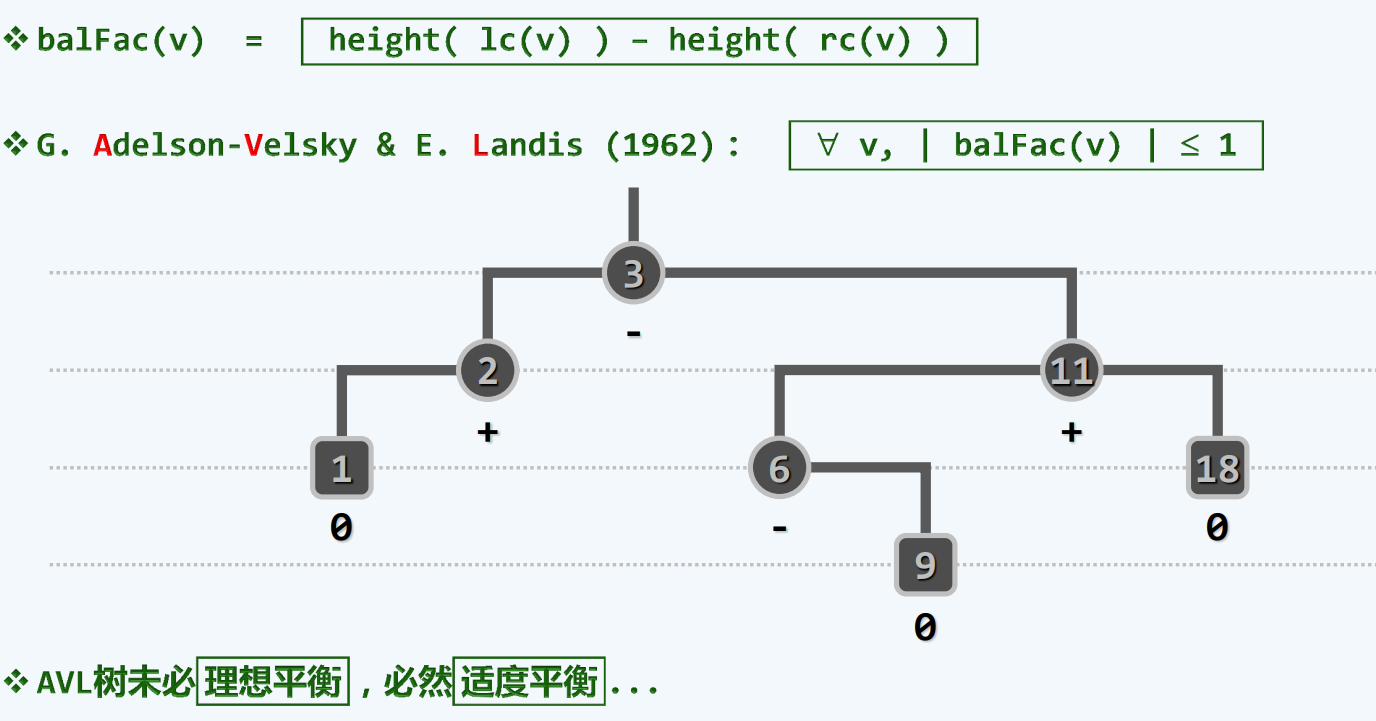
适度平衡
ADT
失衡与重平衡
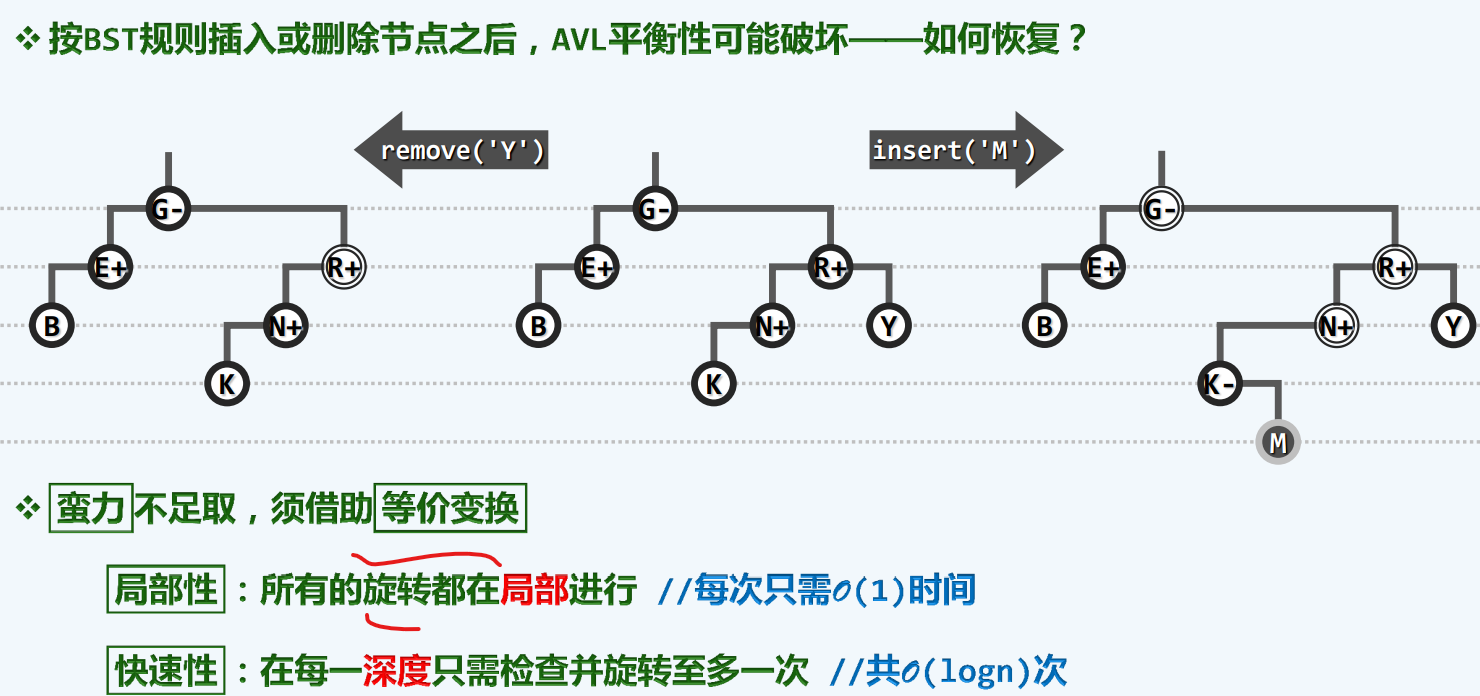
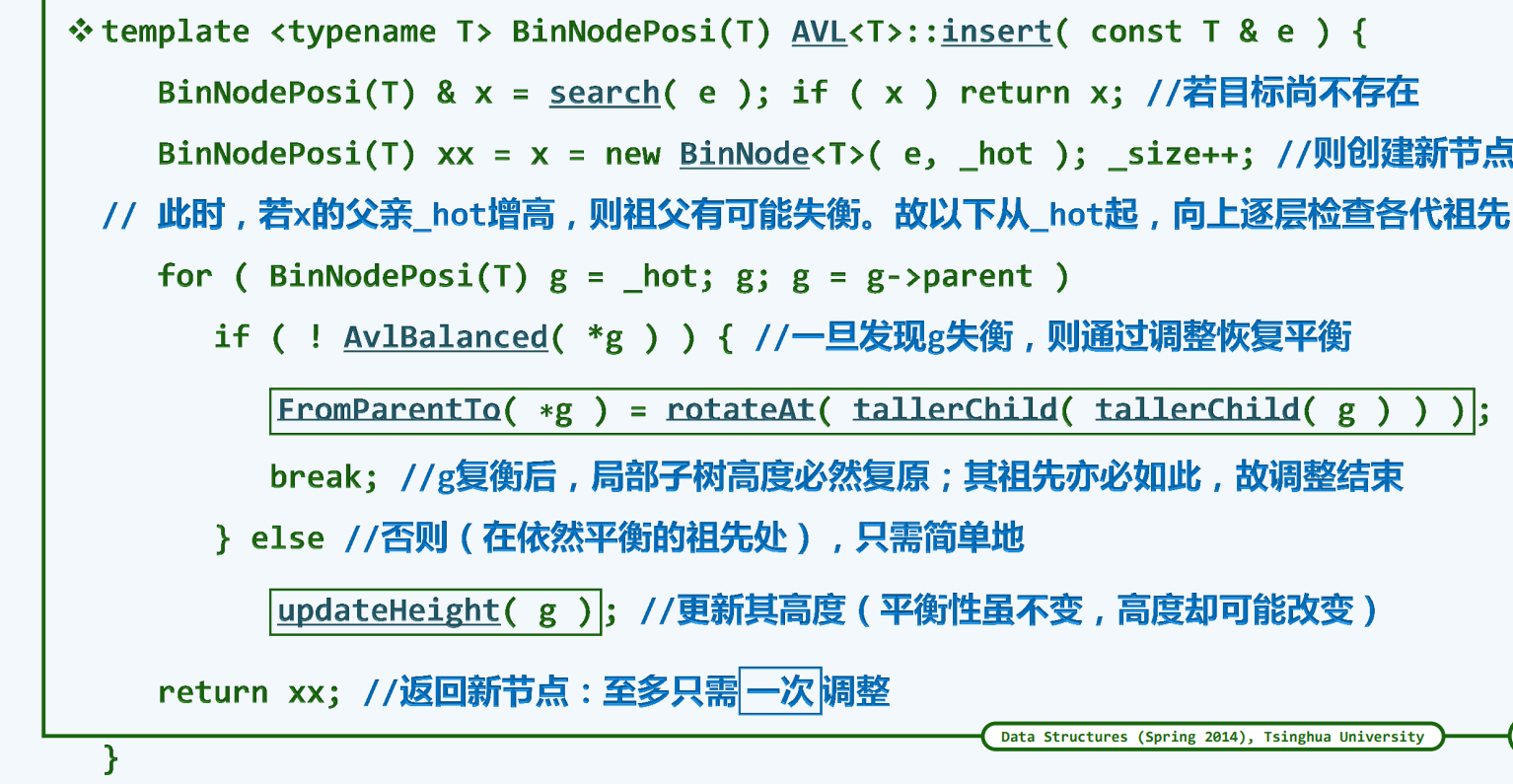
插入
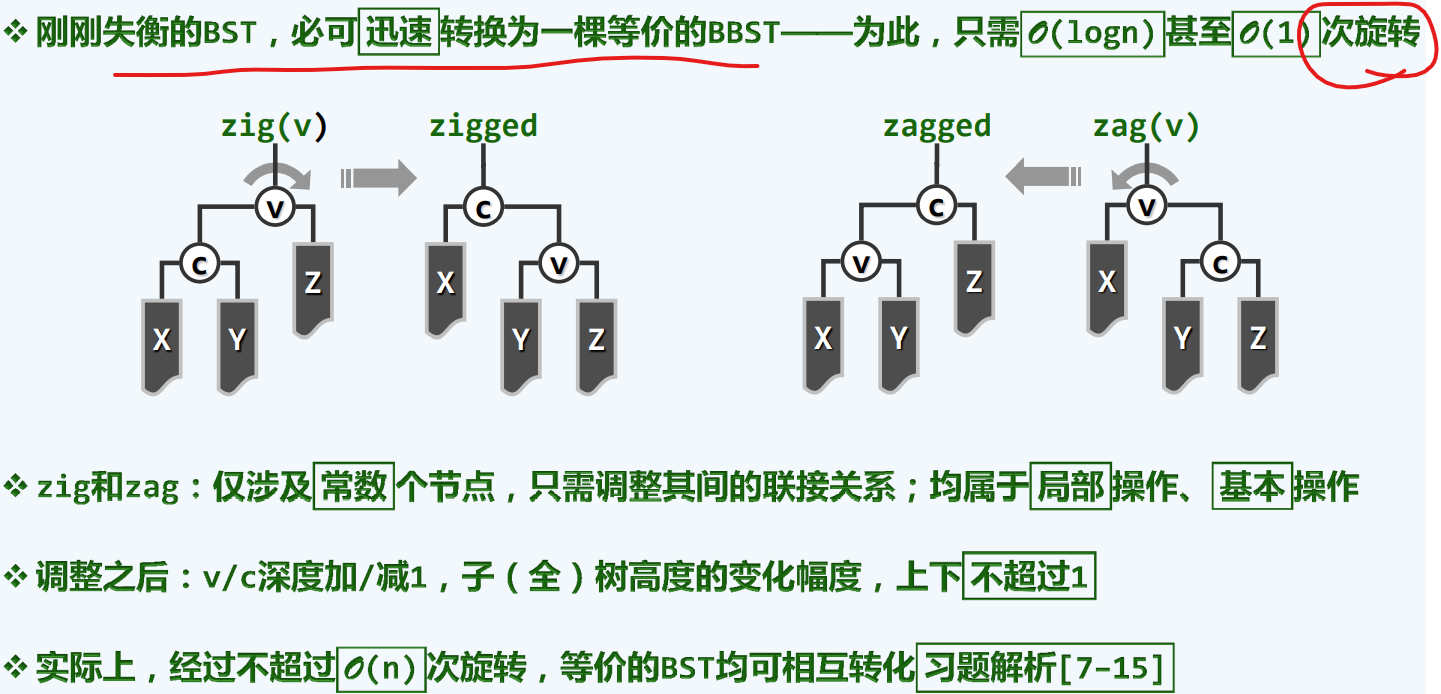
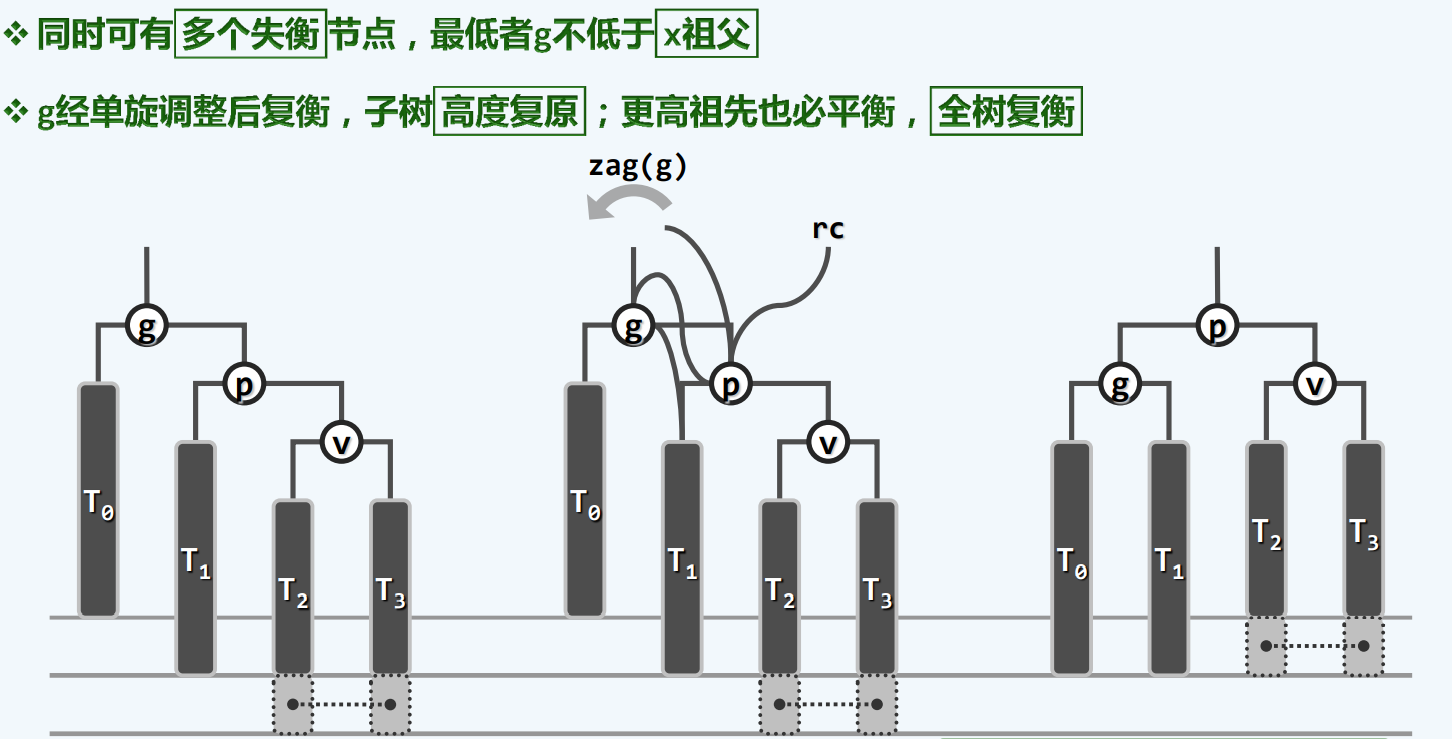
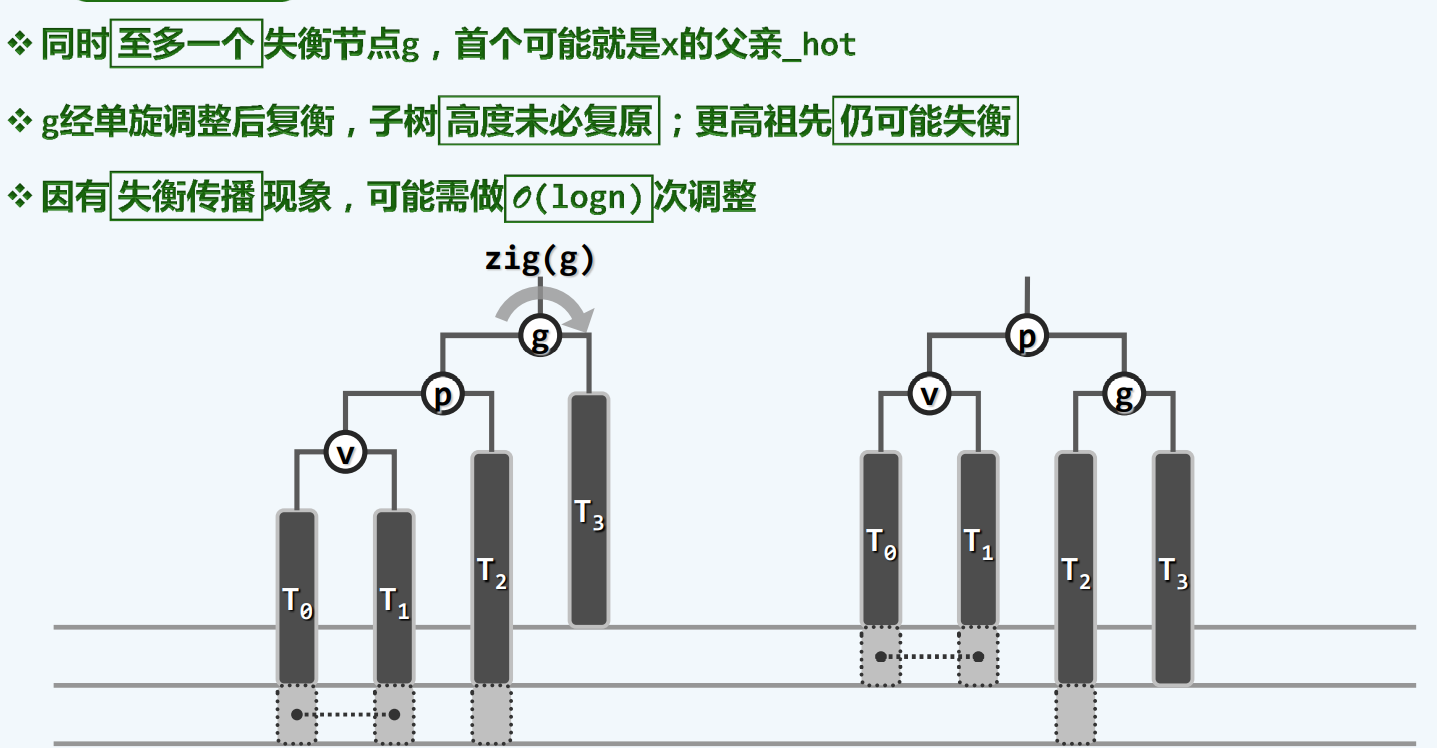
插入:单旋转
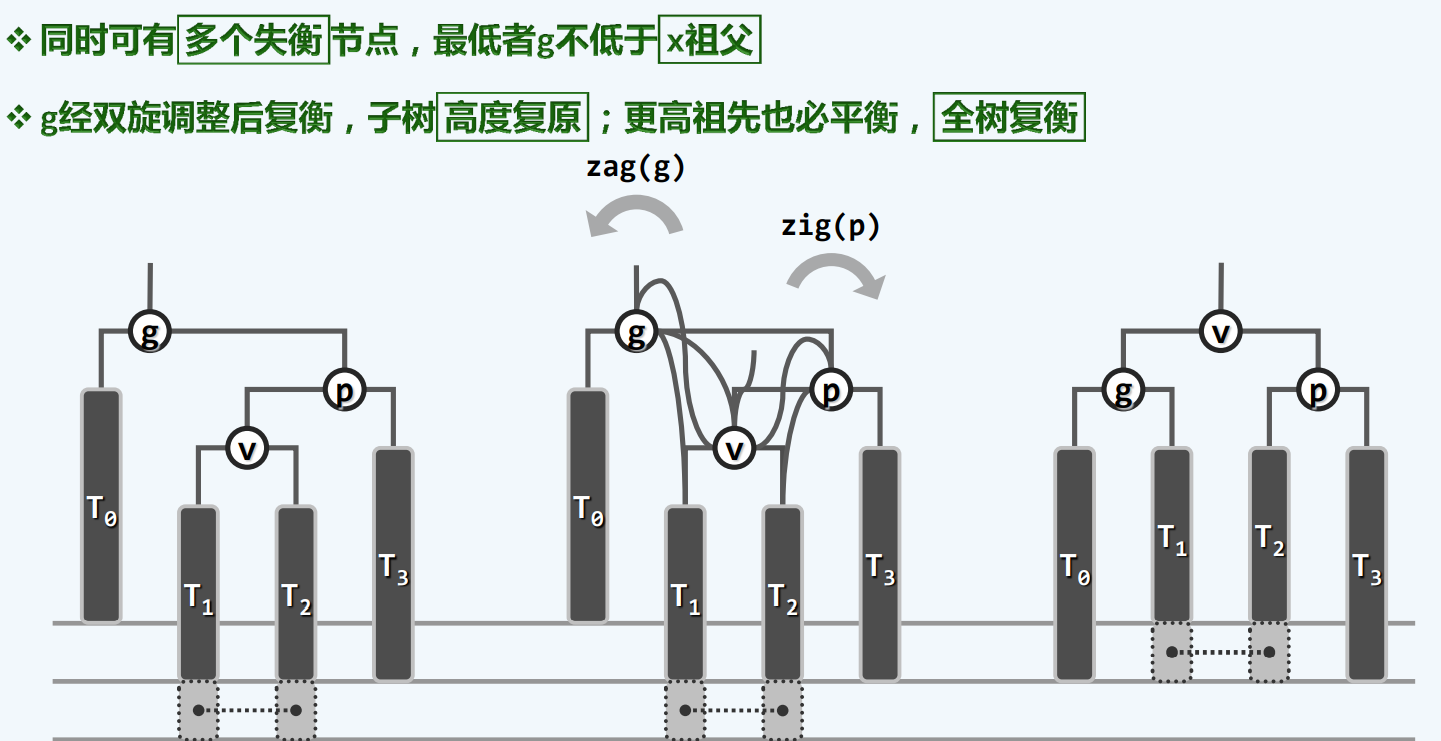
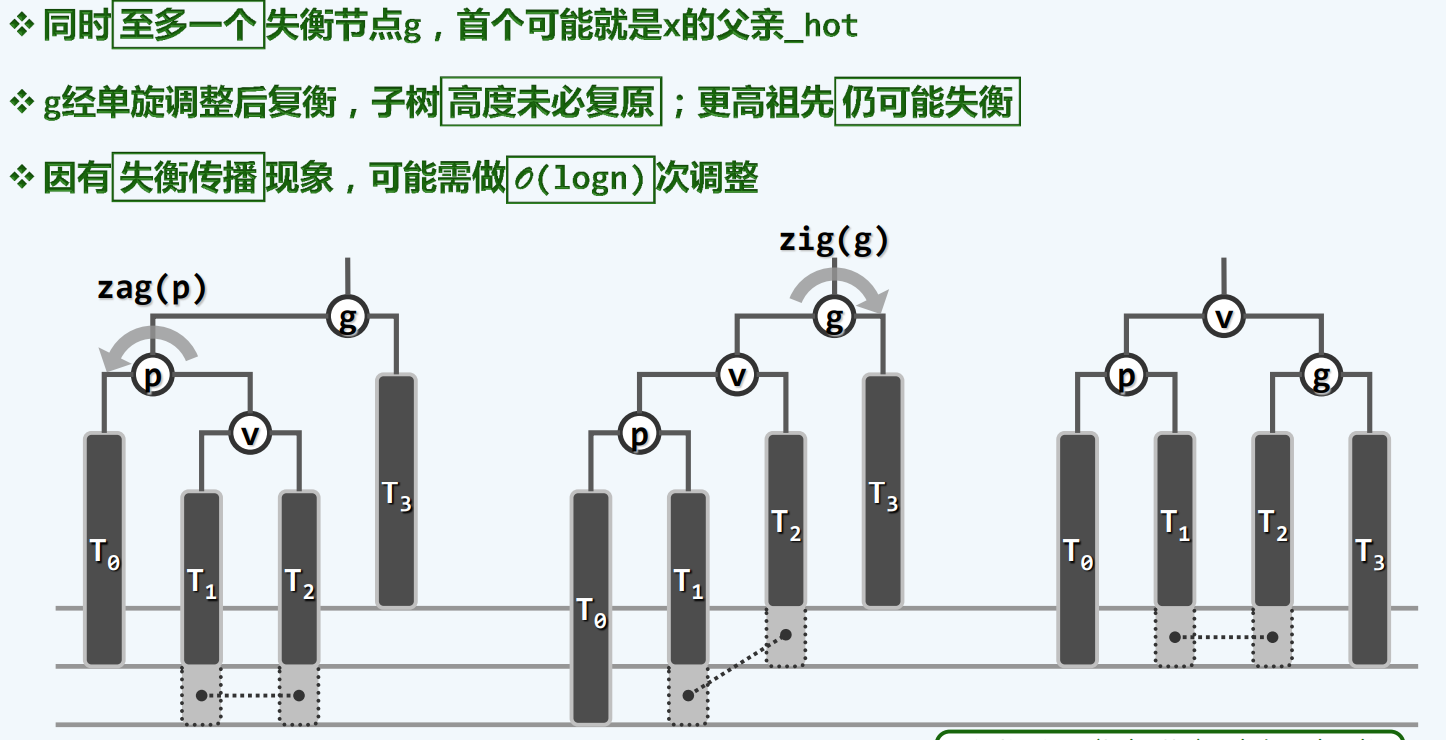
插入:双旋
插入:实现
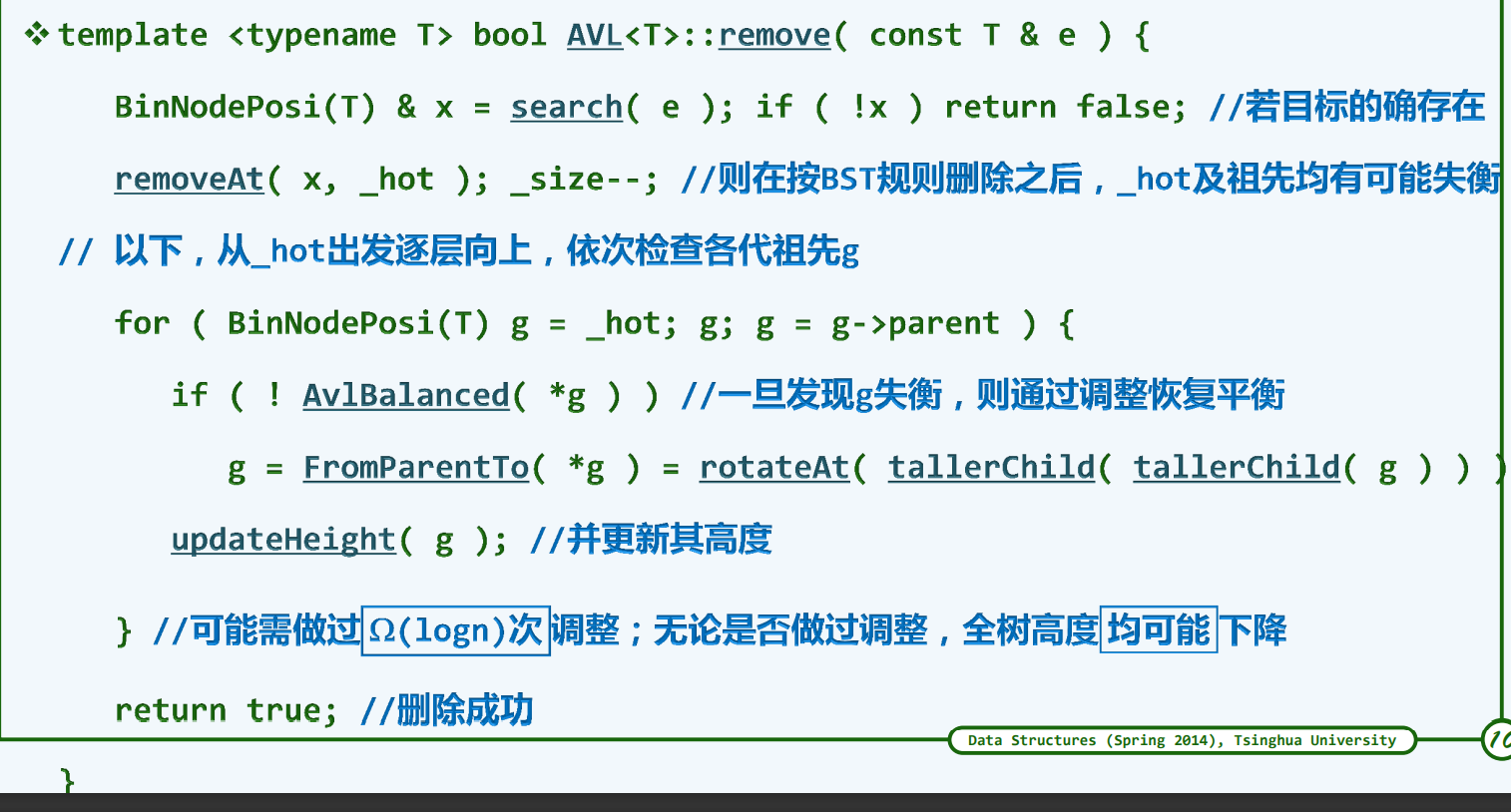
删除
单旋转
双旋转
实现
3+4重构
以上删除插入,使用旋转,无非是帮助理解算法如何实现
而真正实施,大可不必这样,因为我们是追求的效率,而不是所谓的技巧
对于魔方工人而言,可以选择随便组装,然后再转到标准的魔方样子,更可以直接拆散,然后进行组装
算法
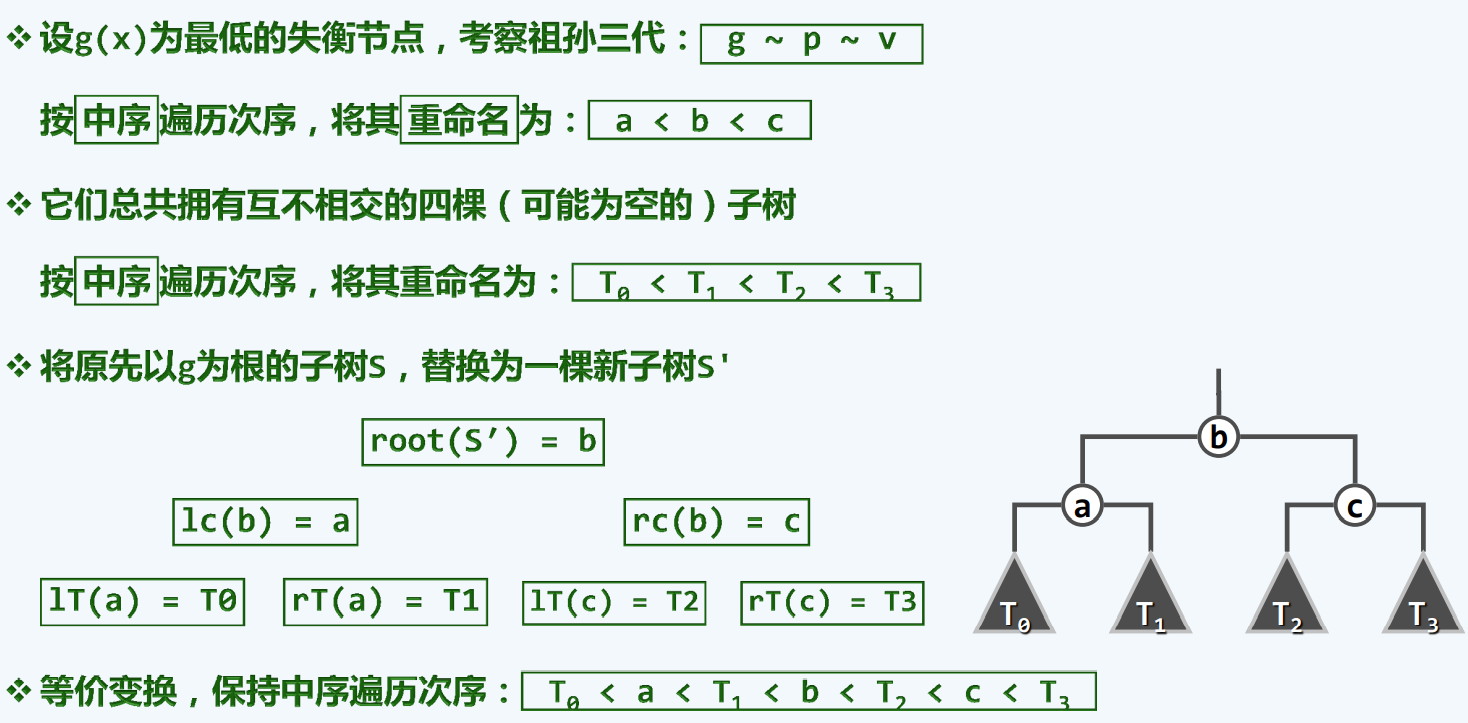
注意重新命名
实现
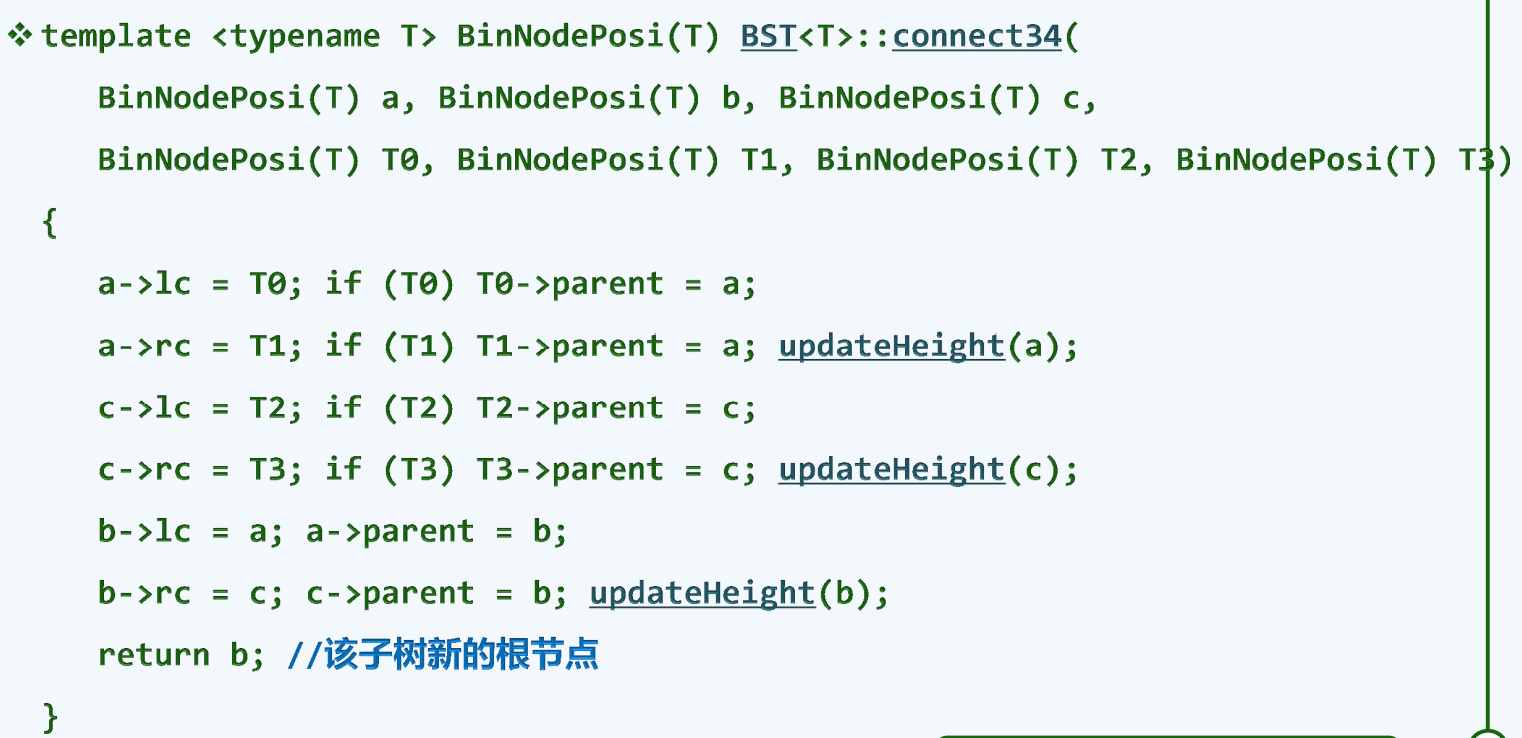
connect34()
1
2
3
4
5
6
7
8
9
10
11
12
| template <typename T> BinNodePosi<T> BST<T>::connect34 (
0007 BinNodePosi<T> a, BinNodePosi<T> b, BinNodePosi<T> c,
0008 BinNodePosi<T> T0, BinNodePosi<T> T1, BinNodePosi<T> T2, BinNodePosi<T> T3
0009 ) {
0010 a->lc = T0; if ( T0 ) T0->parent = a;
0011 a->rc = T1; if ( T1 ) T1->parent = a; updateHeight ( a );
0012 c->lc = T2; if ( T2 ) T2->parent = c;
0013 c->rc = T3; if ( T3 ) T3->parent = c; updateHeight ( c );
0014 b->lc = a; a->parent = b;
0015 b->rc = c; c->parent = b; updateHeight ( b );
0016 return b;
0017 }
|
统一调整
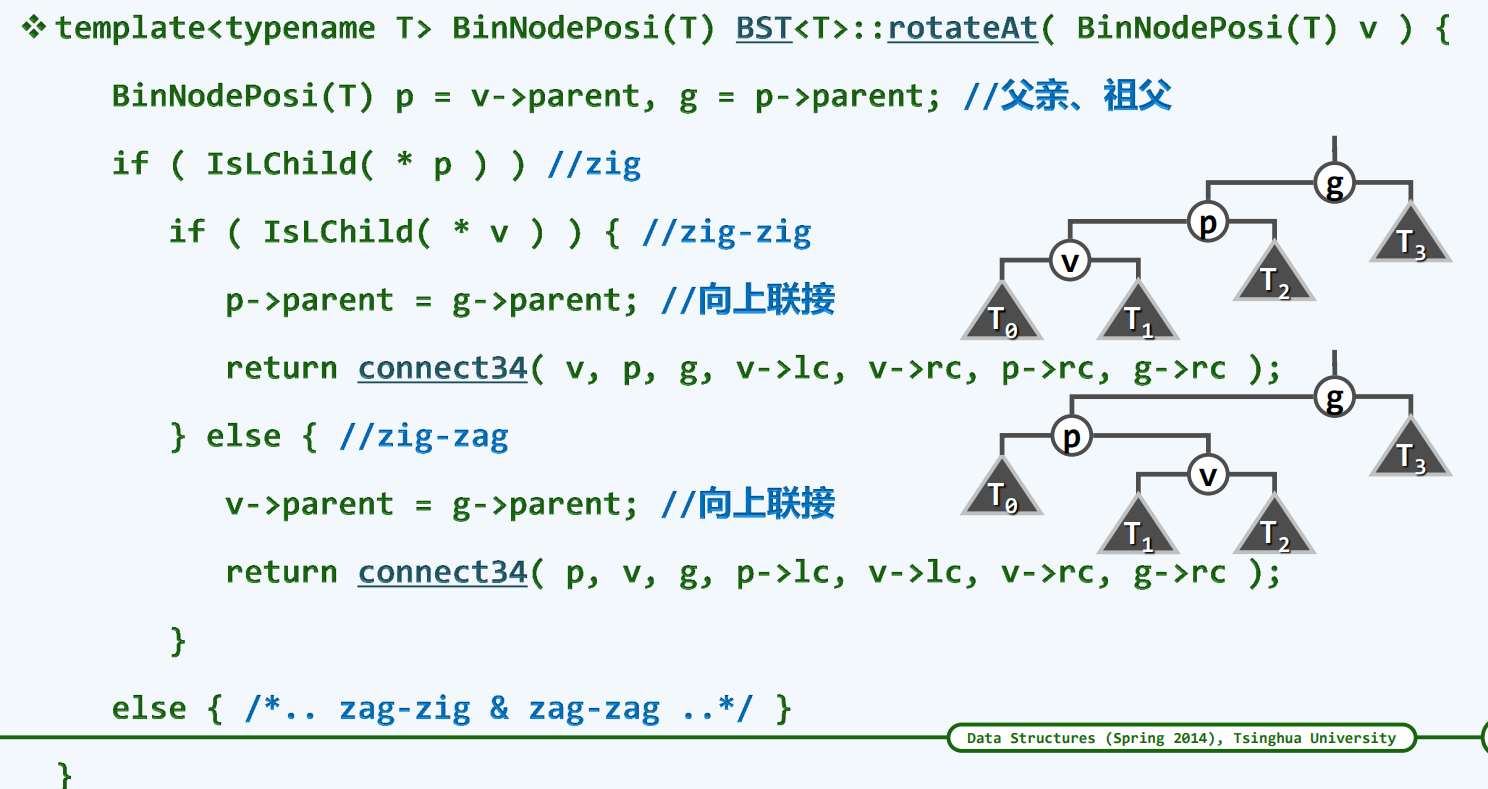
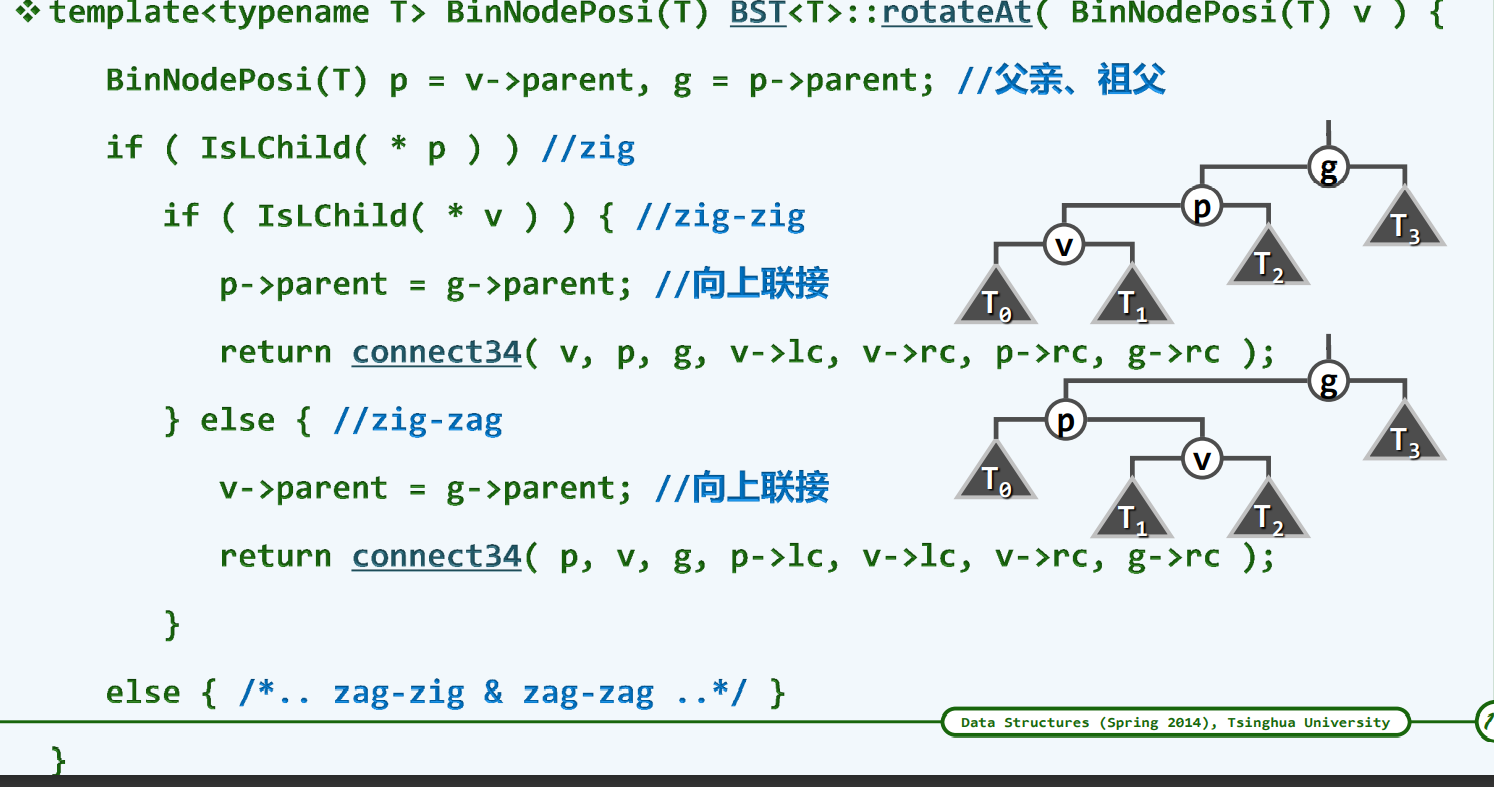
rotateAt()
我们通过判断p和v到底是左孩子还是右孩子,就可以准确的区分选用zig-zig,zig-zag……..
而在每一种情况下,v,p,g究竟该如何命名为a,b,c,以及属下的四棵子树该如何命名,都是固定的,甚至可以绘制成一张表,这张表也就是rotateAt所作的事情
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
|
0005 template <typename T> BinNodePosi<T> BST<T>::rotateAt ( BinNodePosi<T> v ) {
0006 BinNodePosi<T> p = v->parent; BinNodePosi<T> g = p->parent;
0007 if ( IsLChild ( *p ) )
0008 if ( IsLChild ( *v ) ) {
0009 p->parent = g->parent;
0010 return connect34 ( v, p, g, v->lc, v->rc, p->rc, g->rc );
0011 } else {
0012 v->parent = g->parent;
0013 return connect34 ( p, v, g, p->lc, v->lc, v->rc, g->rc );
0014 }
0015 else
0016 if ( IsRChild ( *v ) ) {
0017 p->parent = g->parent;
0018 return connect34 ( g, p, v, g->lc, p->lc, v->lc, v->rc );
0019 } else {
0020 v->parent = g->parent;
0021 return connect34 ( g, v, p, g->lc, v->lc, v->rc, p->rc );
0022 }
0023 }
|
评价AVL
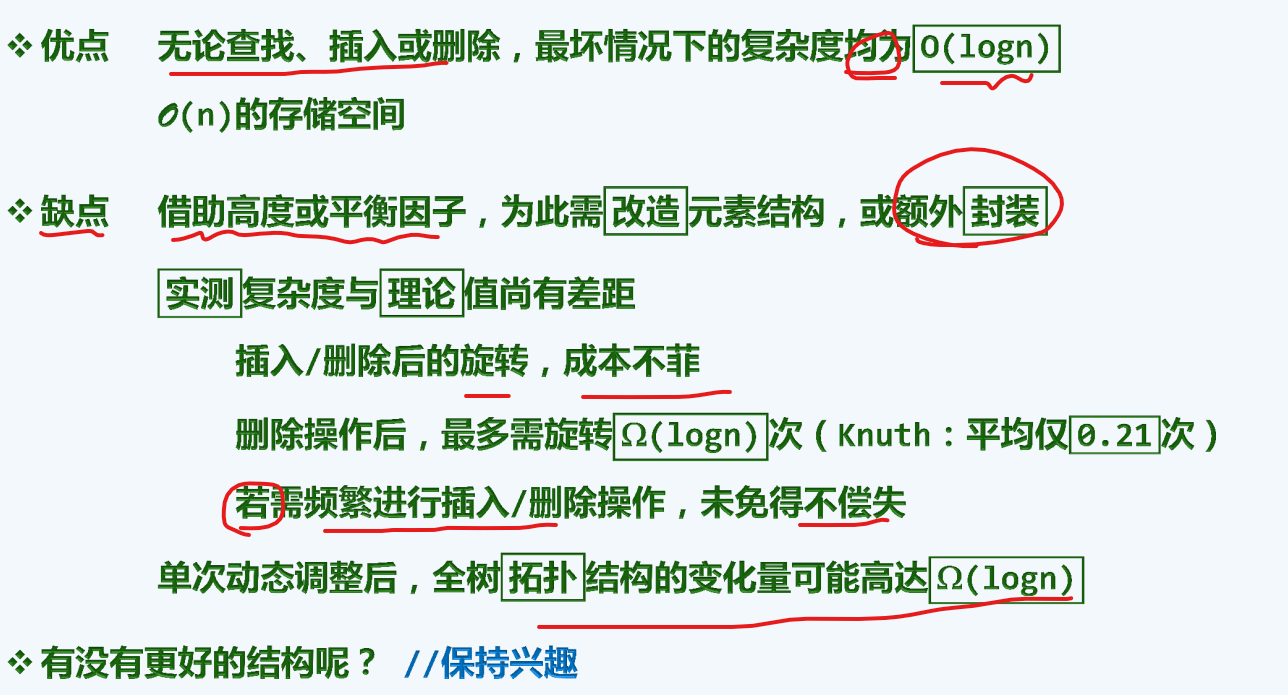
如果说,前两个缺点是鸡蛋里挑骨头,那最后一个则是致命的(拓扑排序的变动)
insert和delete的操作是非常不对等的,就删除而言,拓扑排序变化量能保持在常数的范围,而删除则只能logn,对于更高级的数据结构而言,对变化量是有严格的要求的,而我们这里的logn是绝对不能满足要求的,我们希望将他们控制到更低

 微信
微信 支付宝
支付宝