以下笔记为jjyaoao本人制作,欢迎借鉴学习和提出相关建议,转载需要标明出处www.jjyaoao.space
优先级队列
需求和动机
应用需求
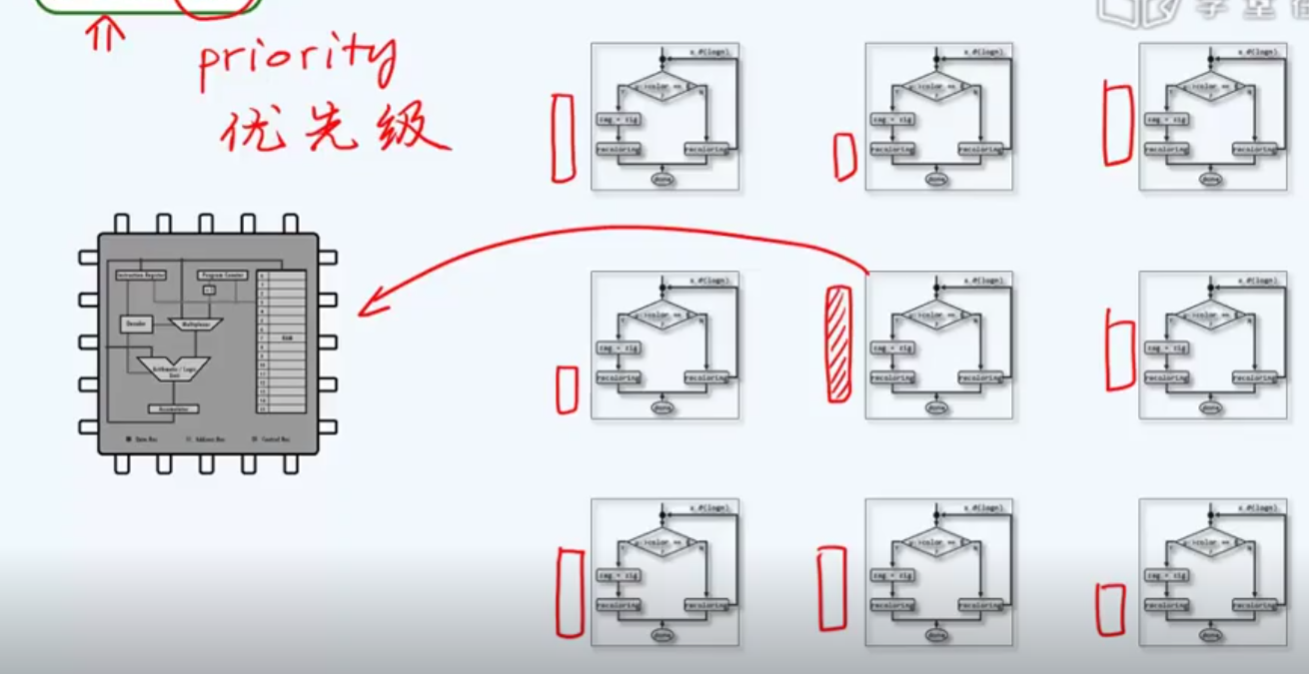
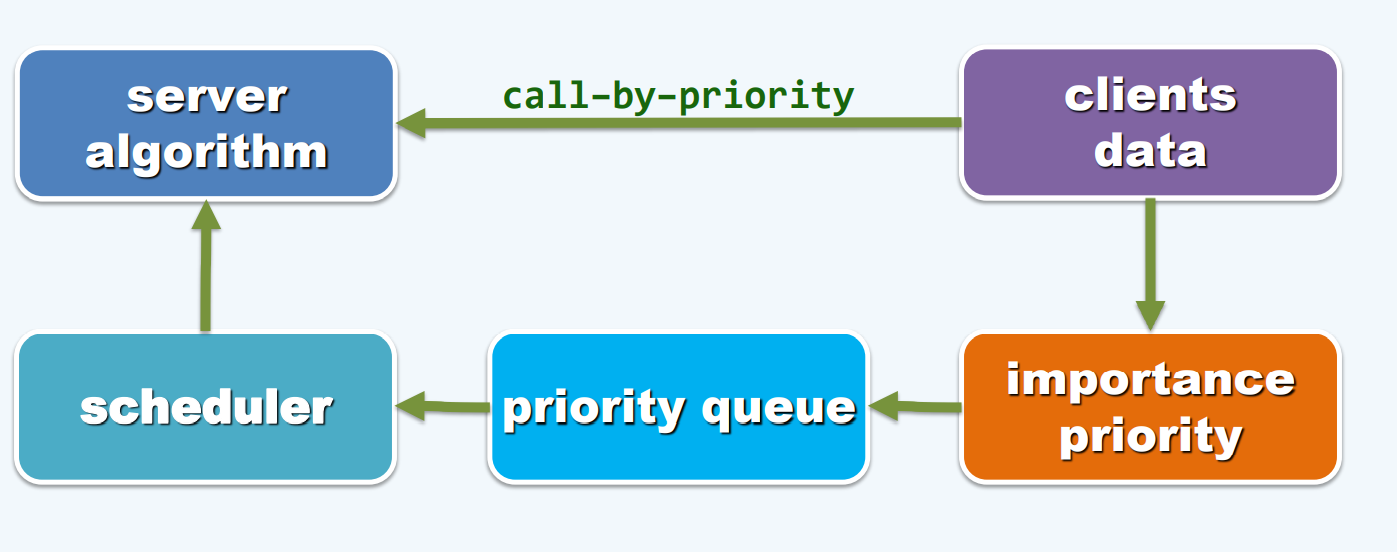
问题模式
服务端–客户
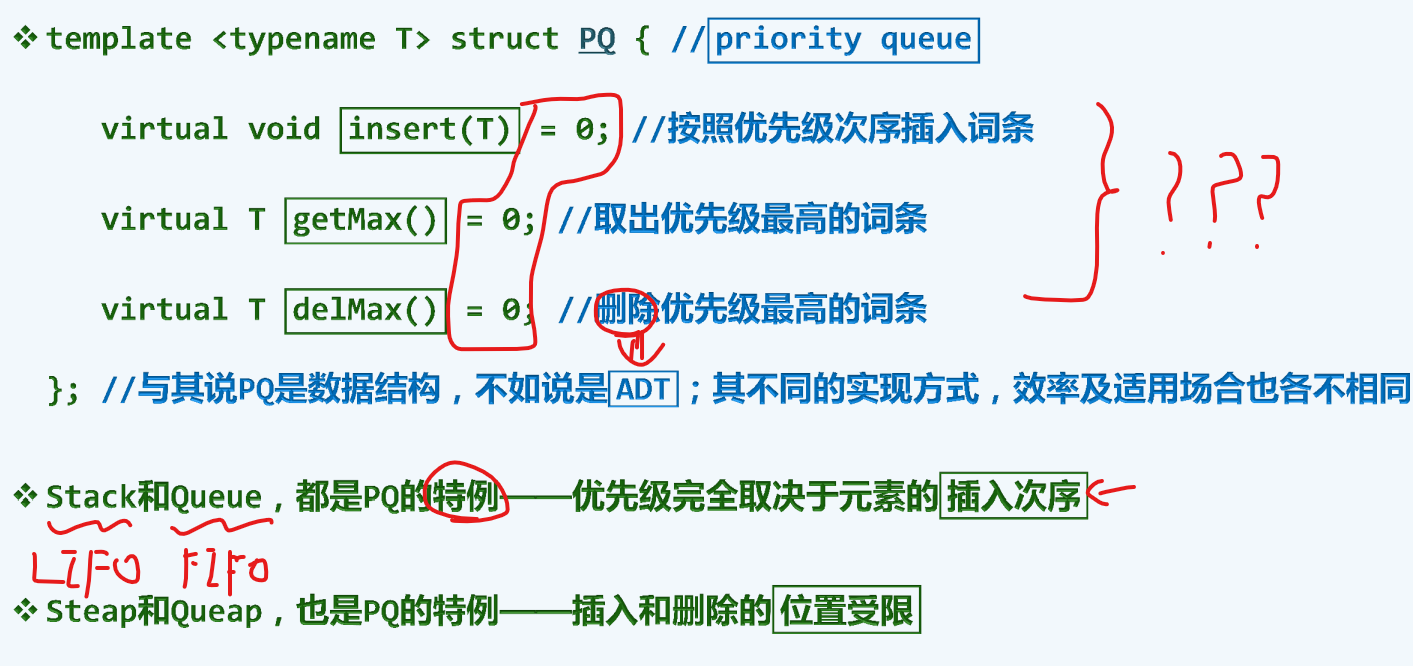
ADT
基本实现
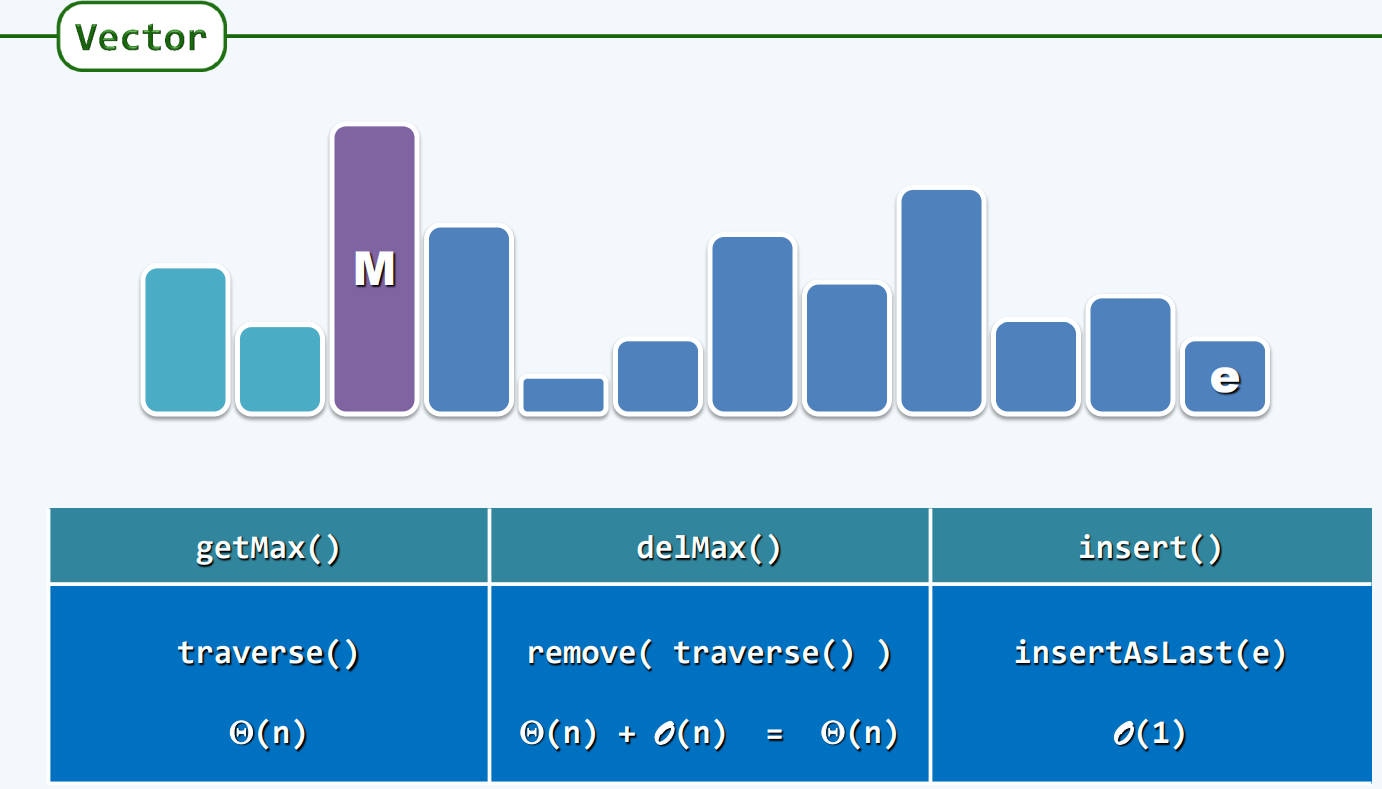
Vector
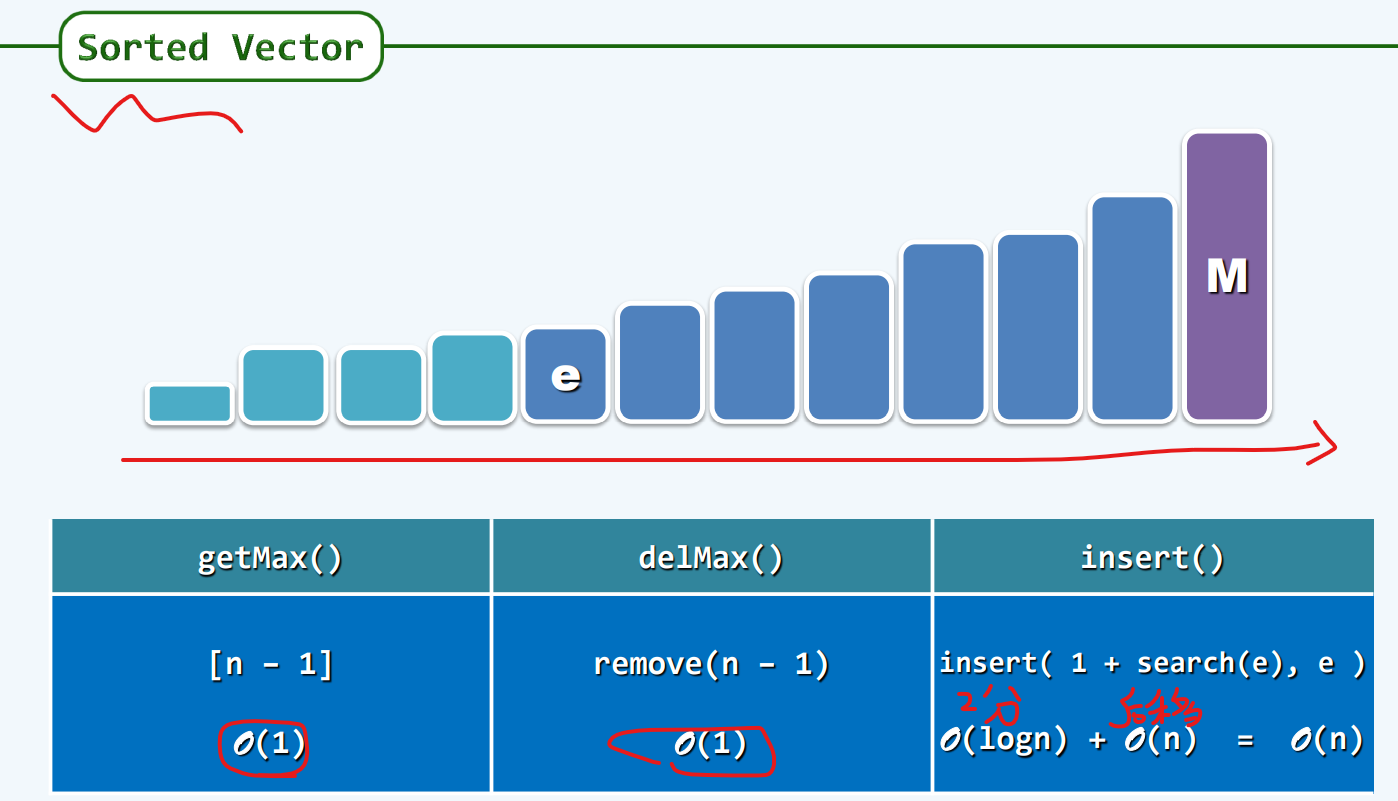
Sorted Vector
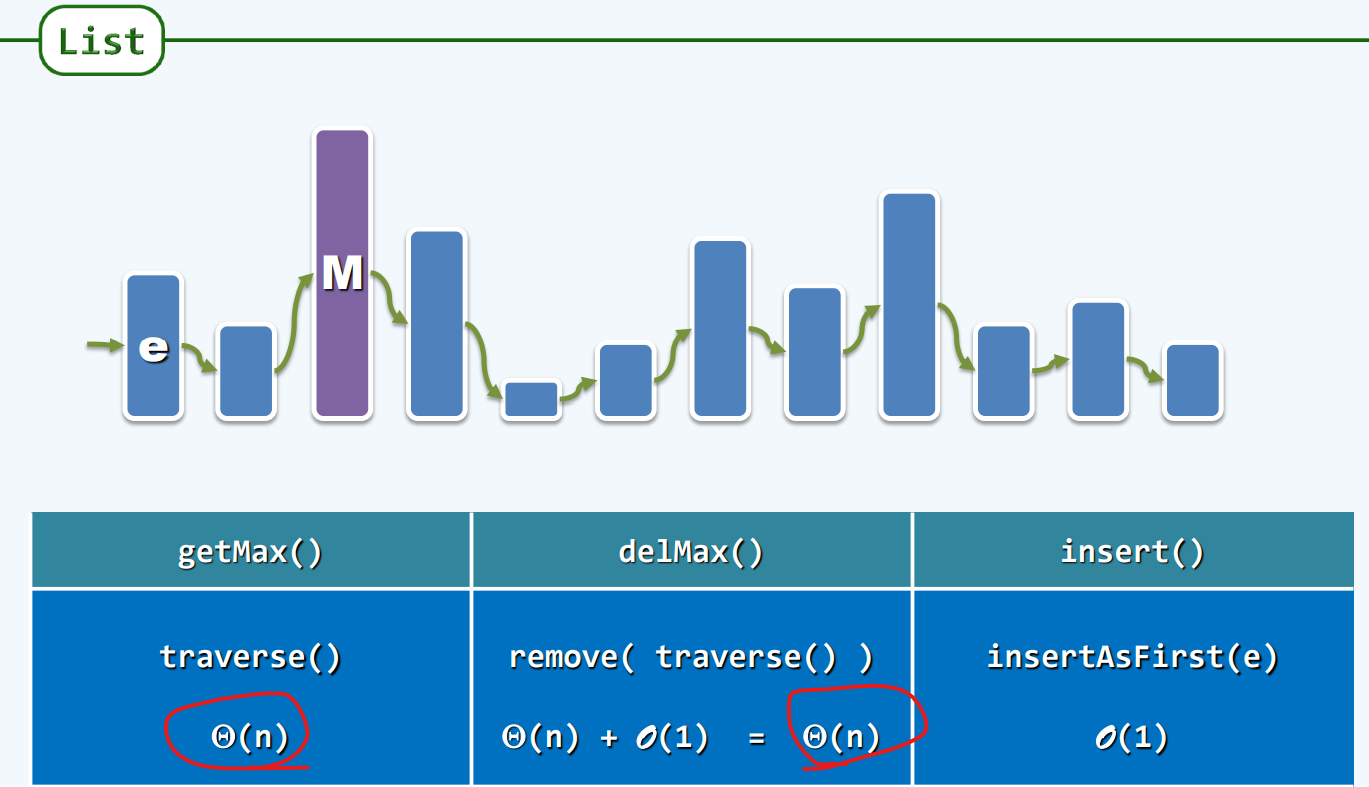
List
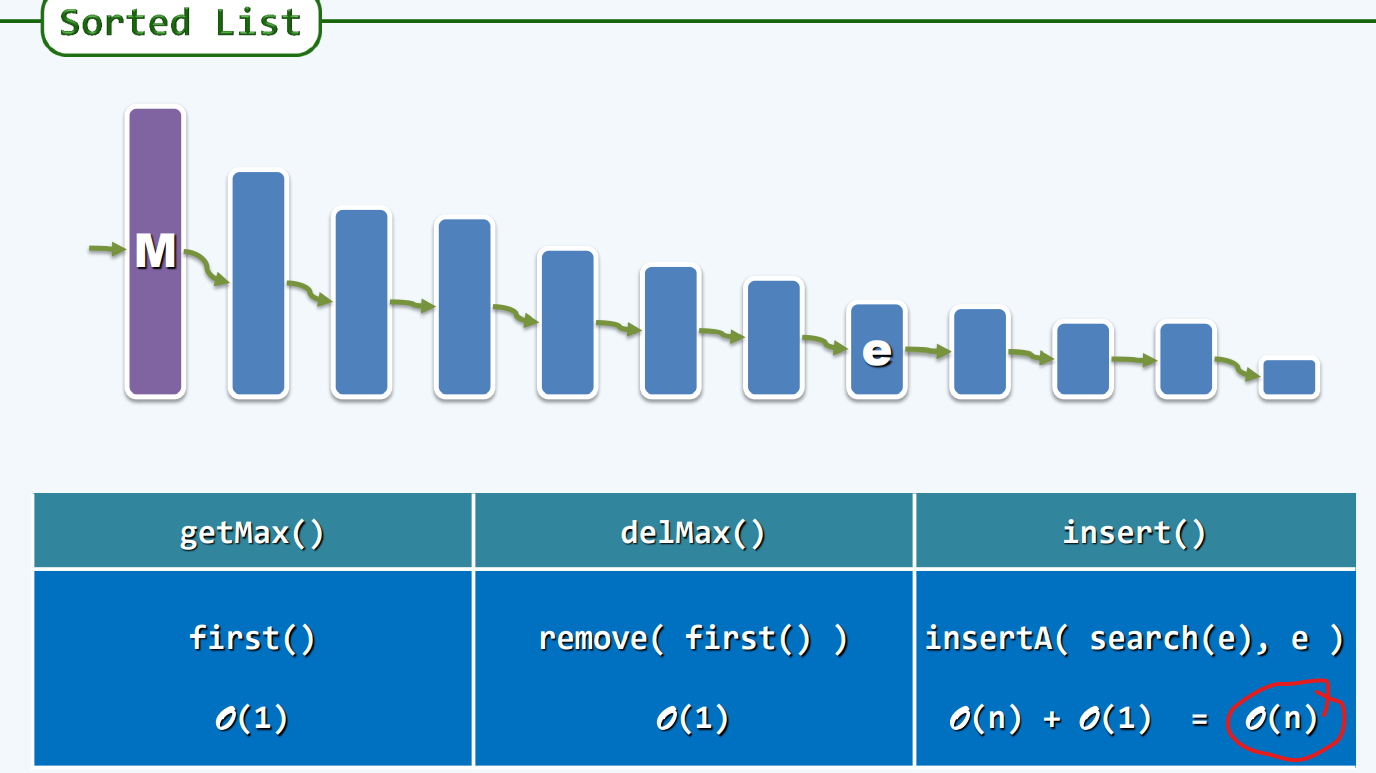
Sorted List
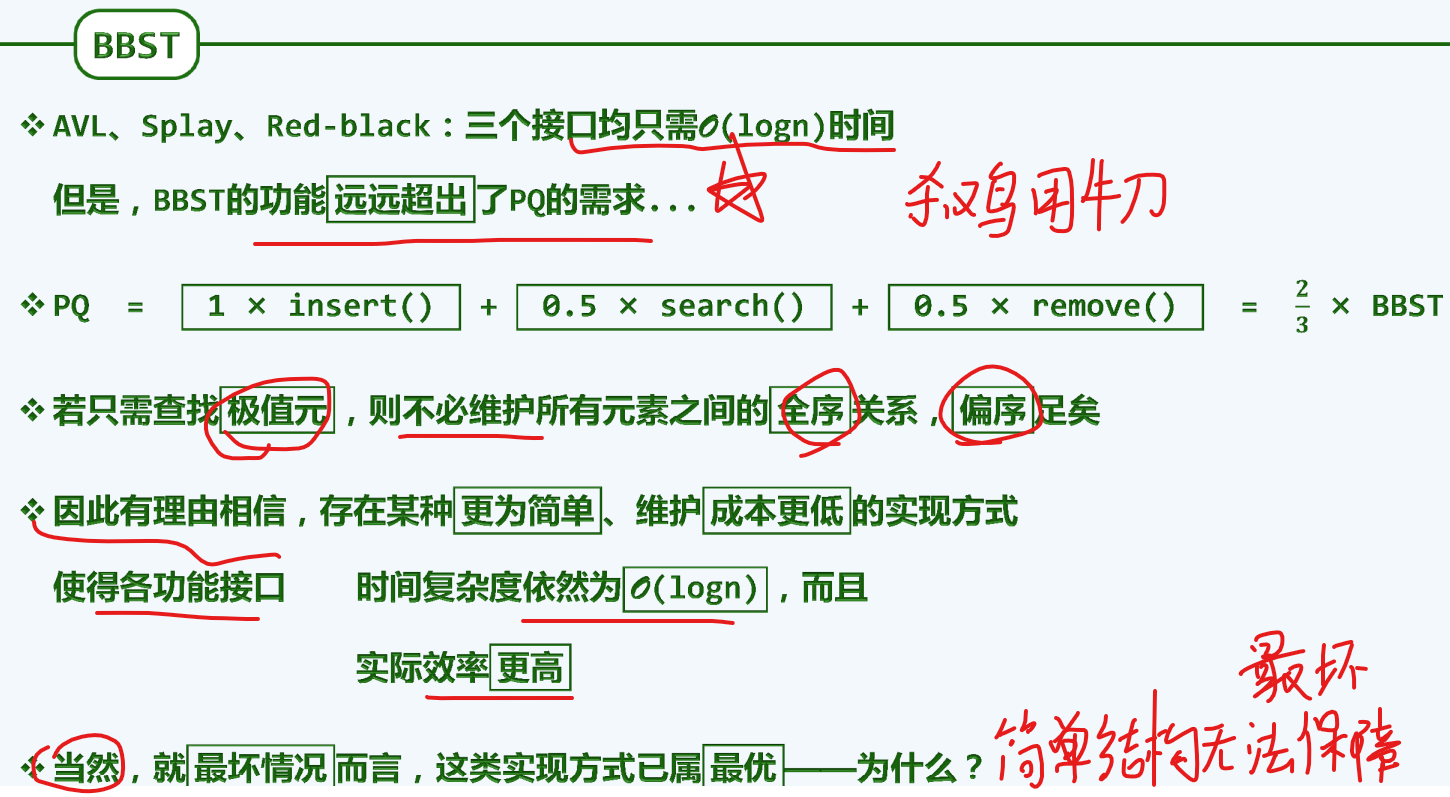
BBST
实现尝试
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
|
0004 #include "PQ_test.h"
0005 #include <windows.h>
0006
0007
0010 template <typename PQ, typename T>
0011 void testHeap ( int n ) {
0012 T* A = new T[2*n/3];
0013 for ( int i = 0; i < 2 * n / 3; i++ ) A[i] = dice ( ( T ) 3 * n );
0014 PQ heap ( A + n / 6, n / 3 );
0015 delete [] A;
0016 while ( heap.size() < n ) {
0017 if ( dice ( 100 ) < 70 ) {
0018 T e = dice ( ( T ) 3 * n );
0019 heap.insert ( e );
0020 } else {
0021 if ( !heap.empty() ) {
0022 T e = heap.delMax();
0023 }
0024 }
0025 }
0026 while ( !heap.empty() ) {
0027 T e = heap.delMax();
0028 }
0029 }
0030
0031
0034 int main ( int argc, char* argv[] ) {
0035 if ( 2 > argc ) { printf ( "Usage: %s <size of test>\a\a\n", argv[0] ); return 1; }
0036 srand ( ( unsigned int ) time ( NULL ) );
0037
0038 #if defined(DSA_PQ_LEFTHEAP)
0039 testHeap<PQ_LeftHeap<int>, int> ( atoi ( argv[1] ) );
0040 #elif defined(DSA_PQ_COMPLHEAP)
0041 testHeap<PQ_ComplHeap<int>, int> ( atoi ( argv[1] ) );
0042 #elif defined(DSA_PQ_LIST)
0043 testHeap<PQ_List<int>, int> ( atoi ( argv[1] ) );
0044 #else
0045 printf ( "PQ type not defined yet\n" );
0046 #endif
0047 return 0;
0048 }
|
完全二叉堆


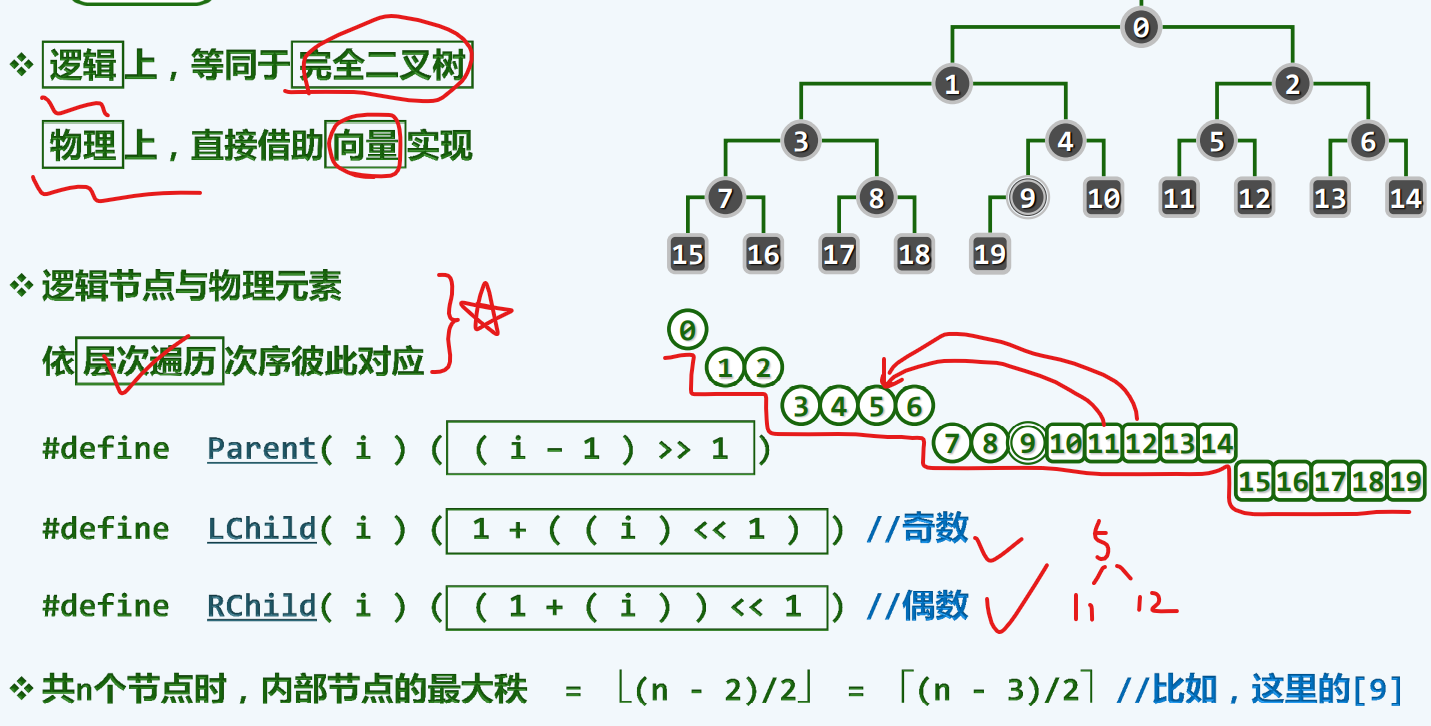
完全二叉树
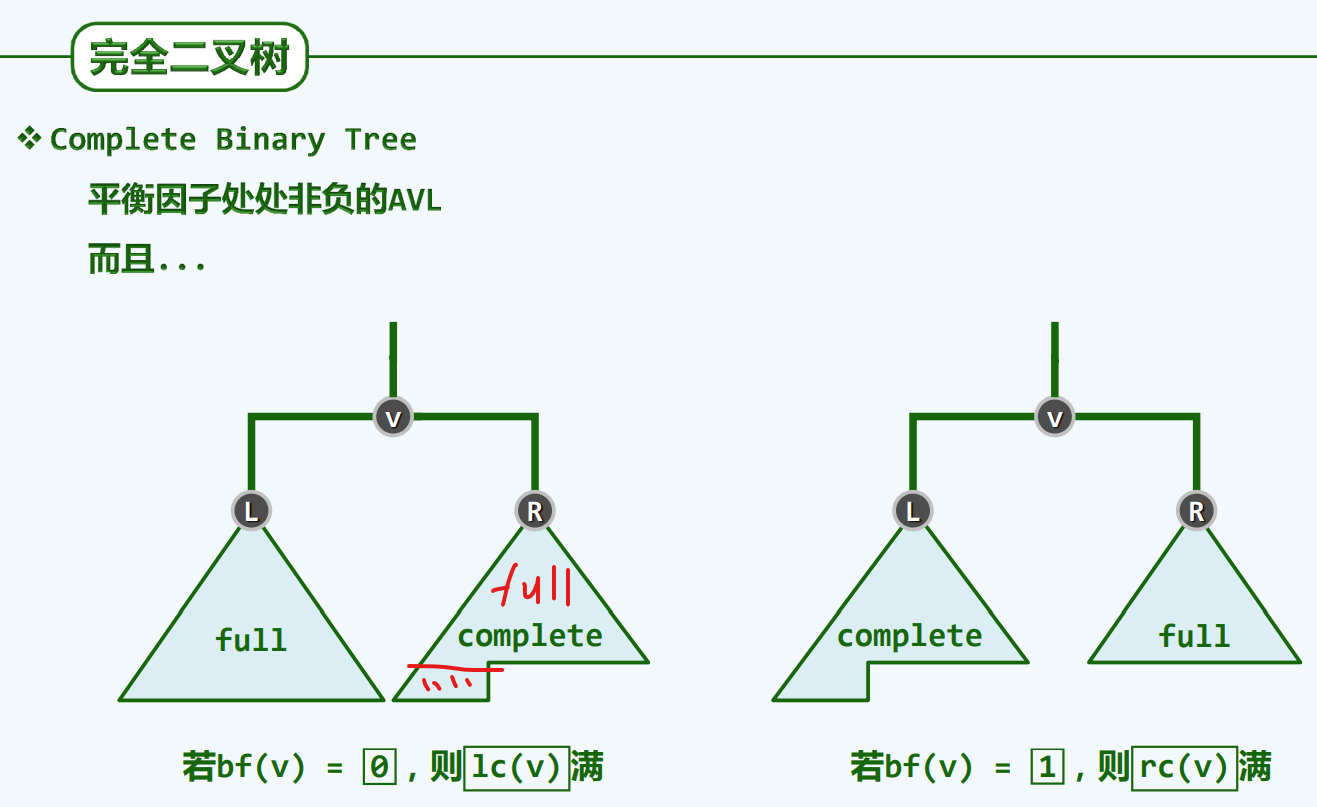
结构性
形具神备
堆序性*
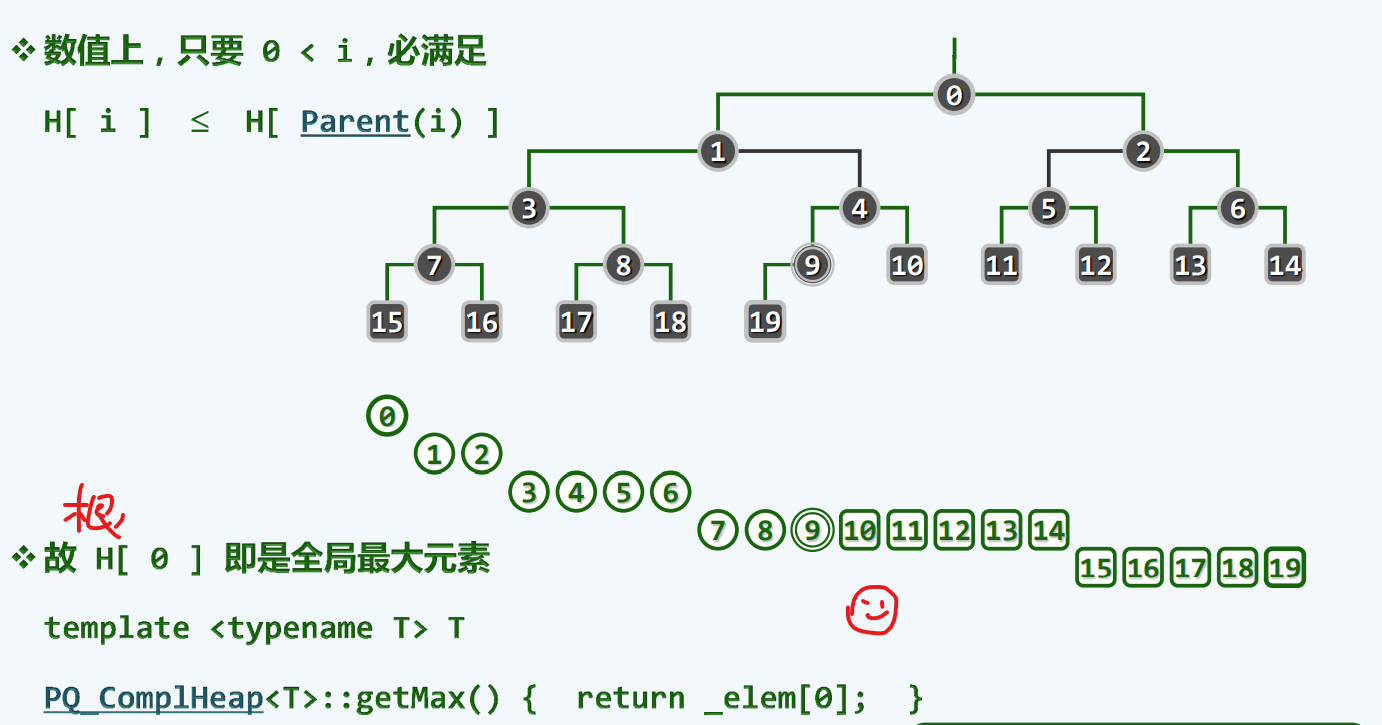
根节点为全局最大的元素
ADT
1
2
3
4
5
6
7
8
9
10
11
12
13
| #include "Vector/Vector.h"
0002 #include "PQ/PQ.h"
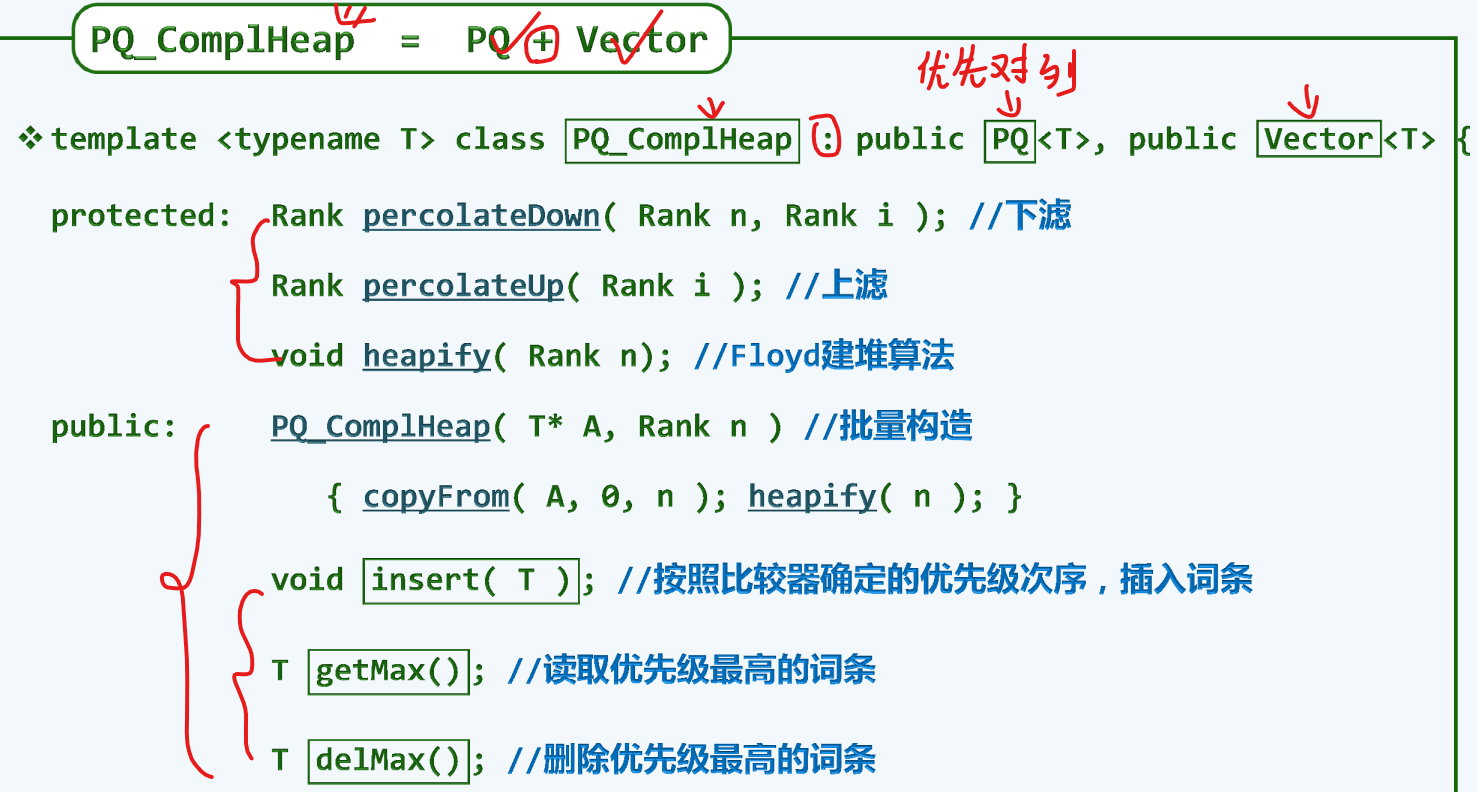
0003 template <typename T> struct PQ_ComplHeap : public PQ<T>, public Vector<T> {
0004 PQ_ComplHeap() { }
0005 PQ_ComplHeap ( T* A, Rank n ) { copyFrom ( A, 0, n ); heapify ( _elem, n ); }
0006 void insert ( T );
0007 T getMax();
0008 T delMax();
0009 };
0010 template <typename T> void heapify ( T* A, Rank n );
0011 template <typename T> Rank percolateDown ( T* A, Rank n, Rank i );
0012 template <typename T> Rank percolateUp ( T* A, Rank i );
0013
|
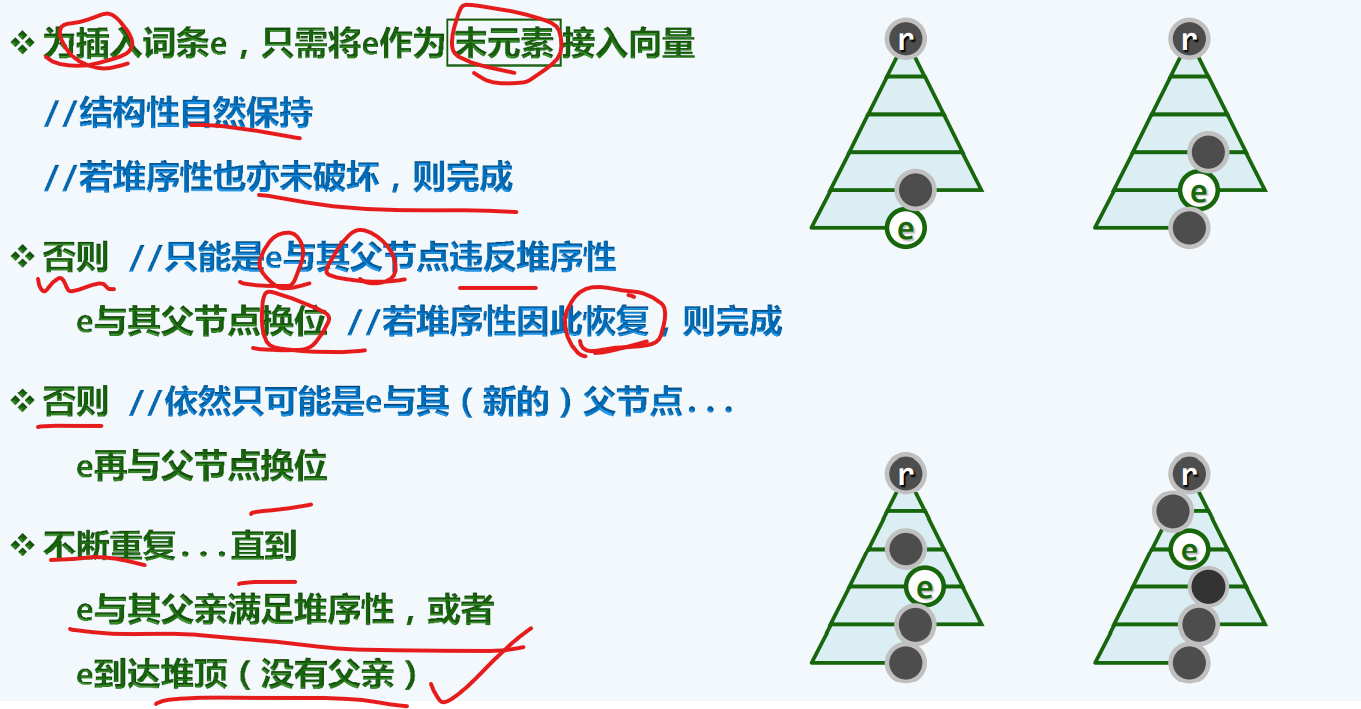
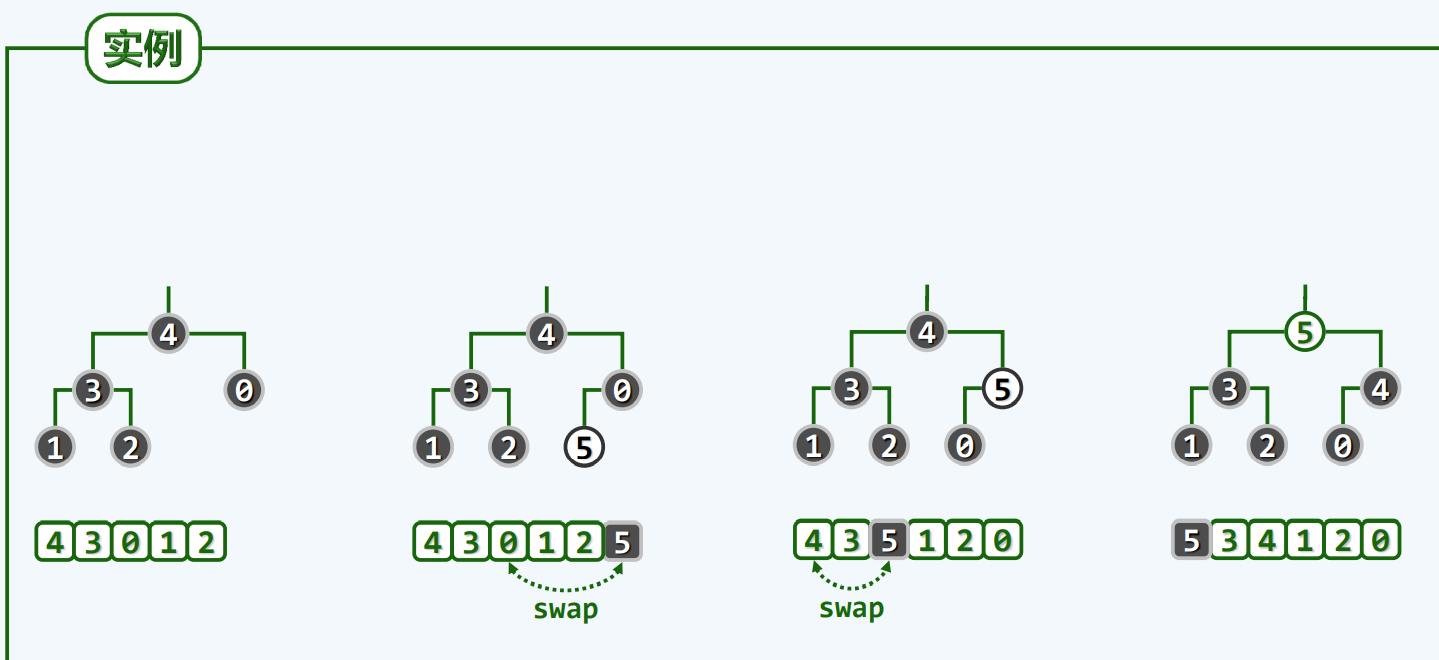
上滤-插入
算法描述
实例
实现
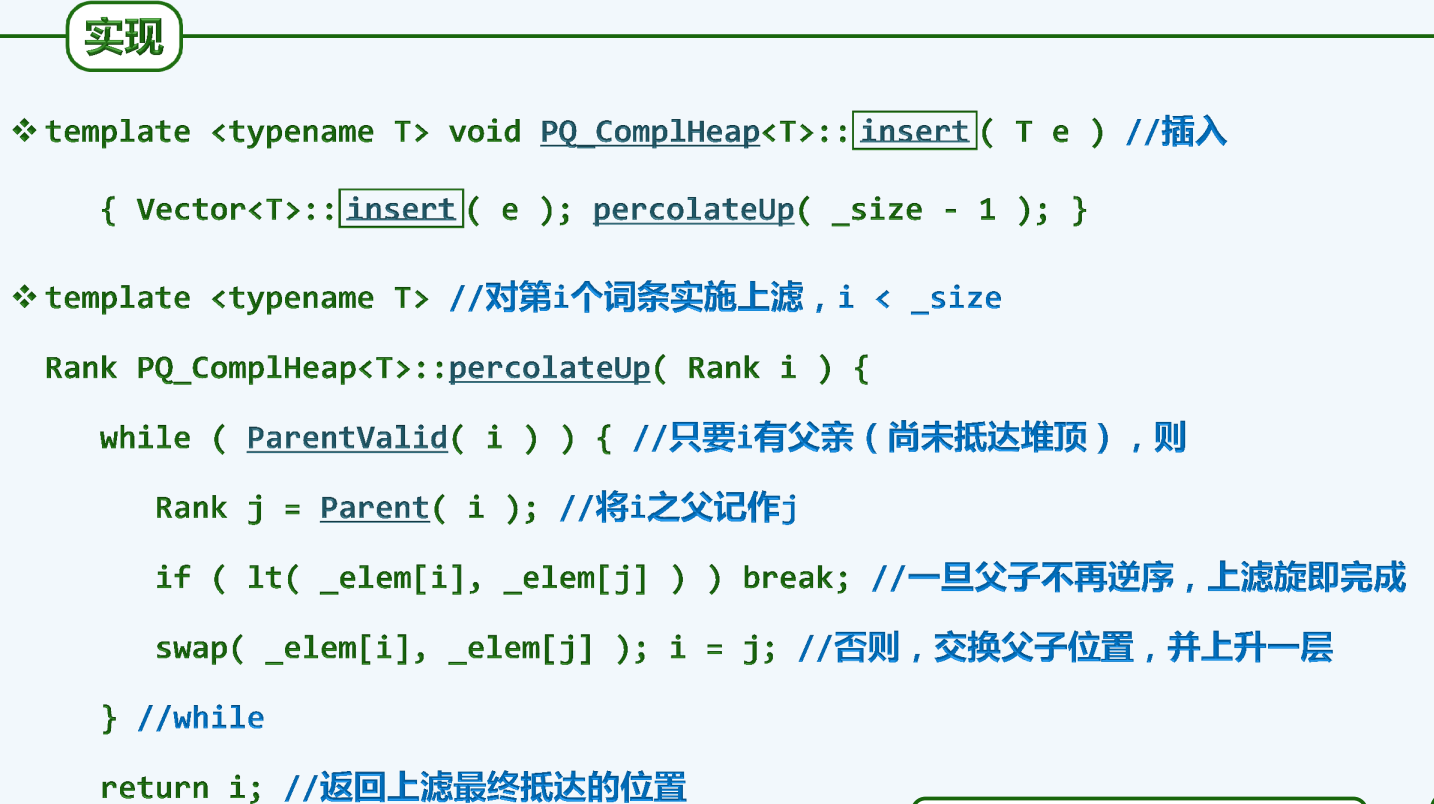
insert()
将待插入的e,接入向量之中(末尾元素,对应的秩为n-1)
1
2
3
4
| template <typename T> void PQ_ComplHeap<T>::insert ( T e ) {
0002 Vector<T>::insert ( e );
0003 percolateUp ( _elem, _size - 1 );
0004 }
|
上滤调整
迭代式的调整过程是用while循环完成的
1
2
3
4
5
6
7
8
9
|
0002 template <typename T> Rank percolateUp ( T* A, Rank i ) {
0003 while ( 0 < i ) {
0004 Rank j = Parent ( i );
0005 if ( lt ( A[i], A[j] ) ) break;
0006 swap ( A[i], A[j] ); i = j;
0007 }
0008 return i;
0009 }
|
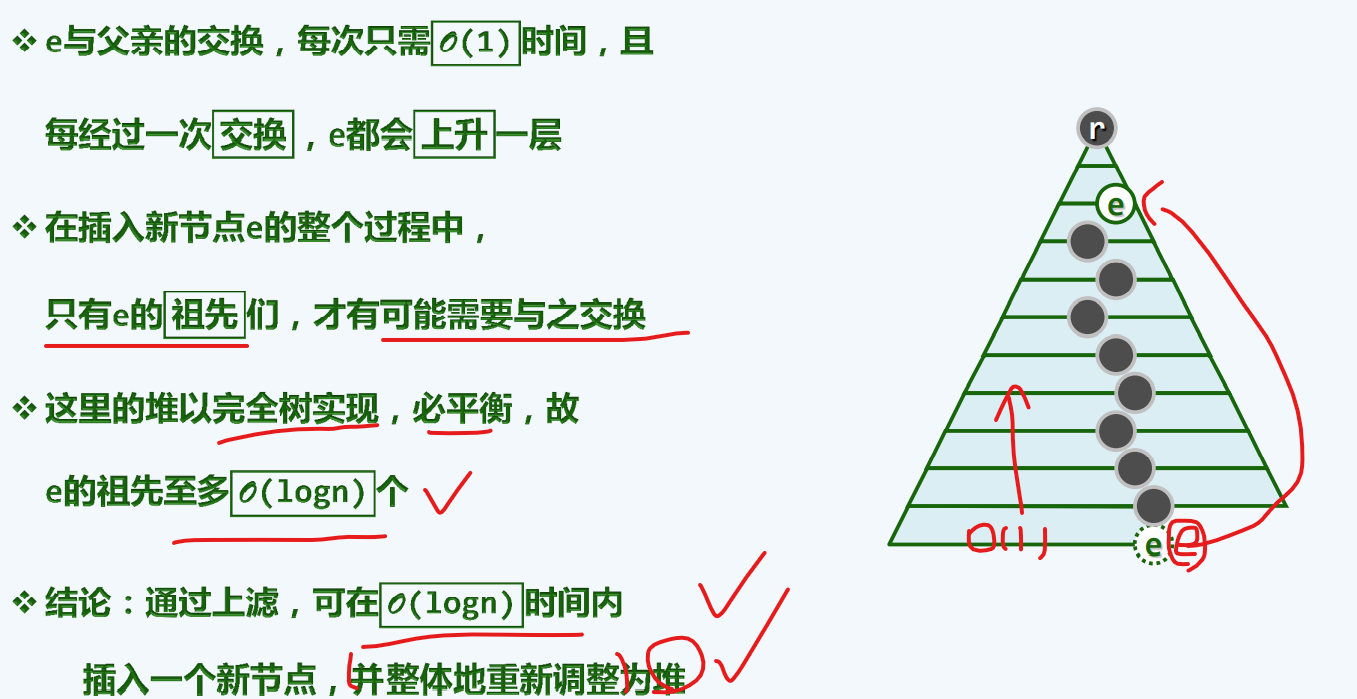
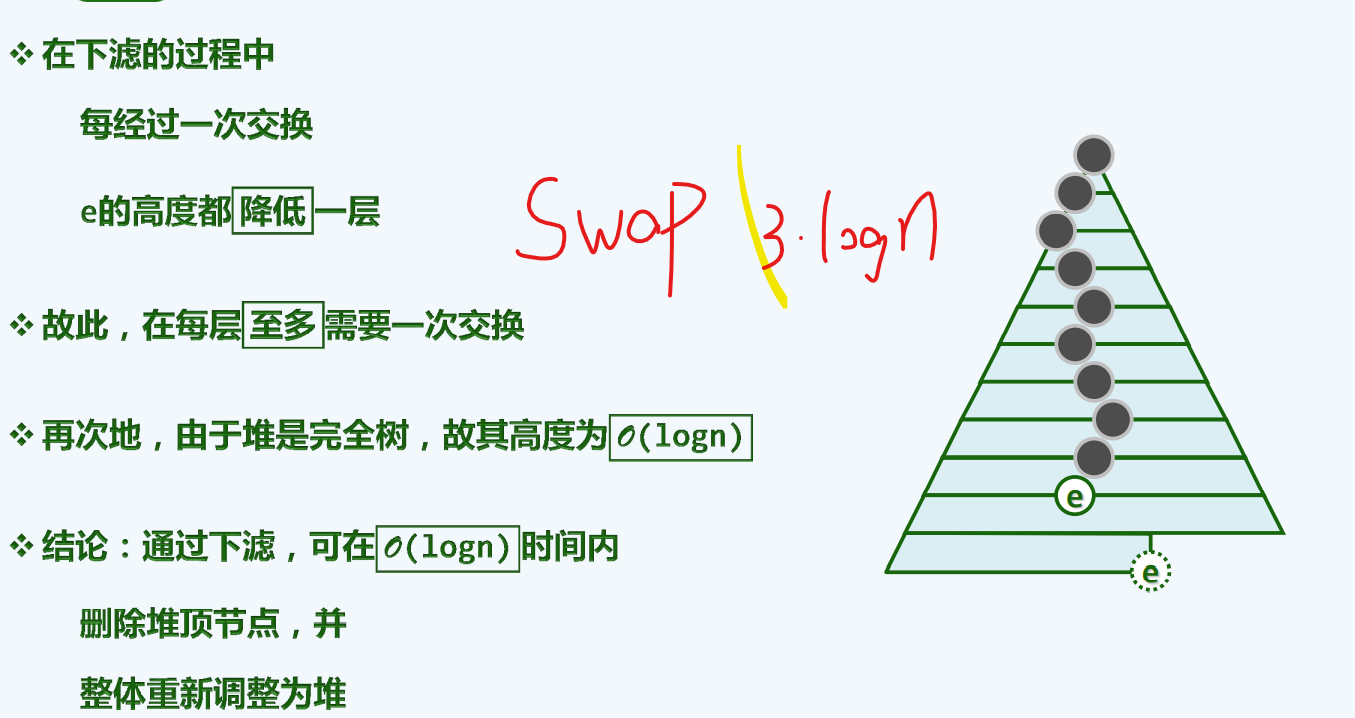
效率
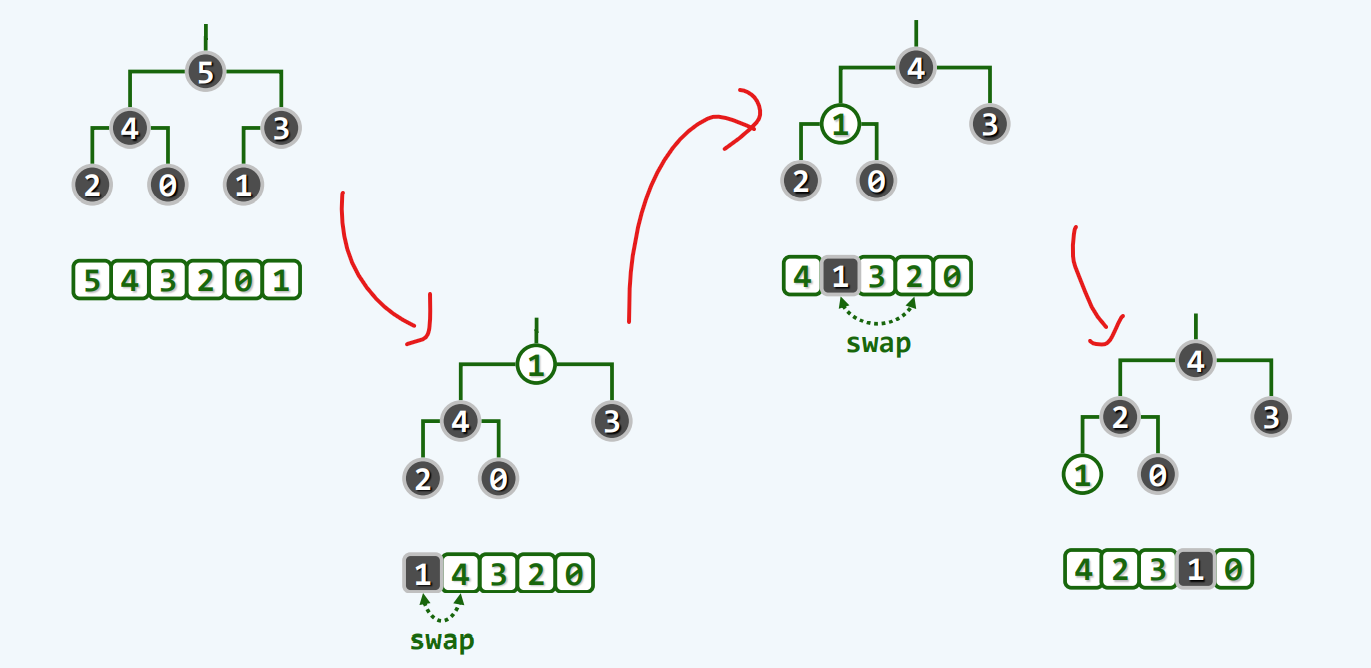
下滤-删除
算法描述
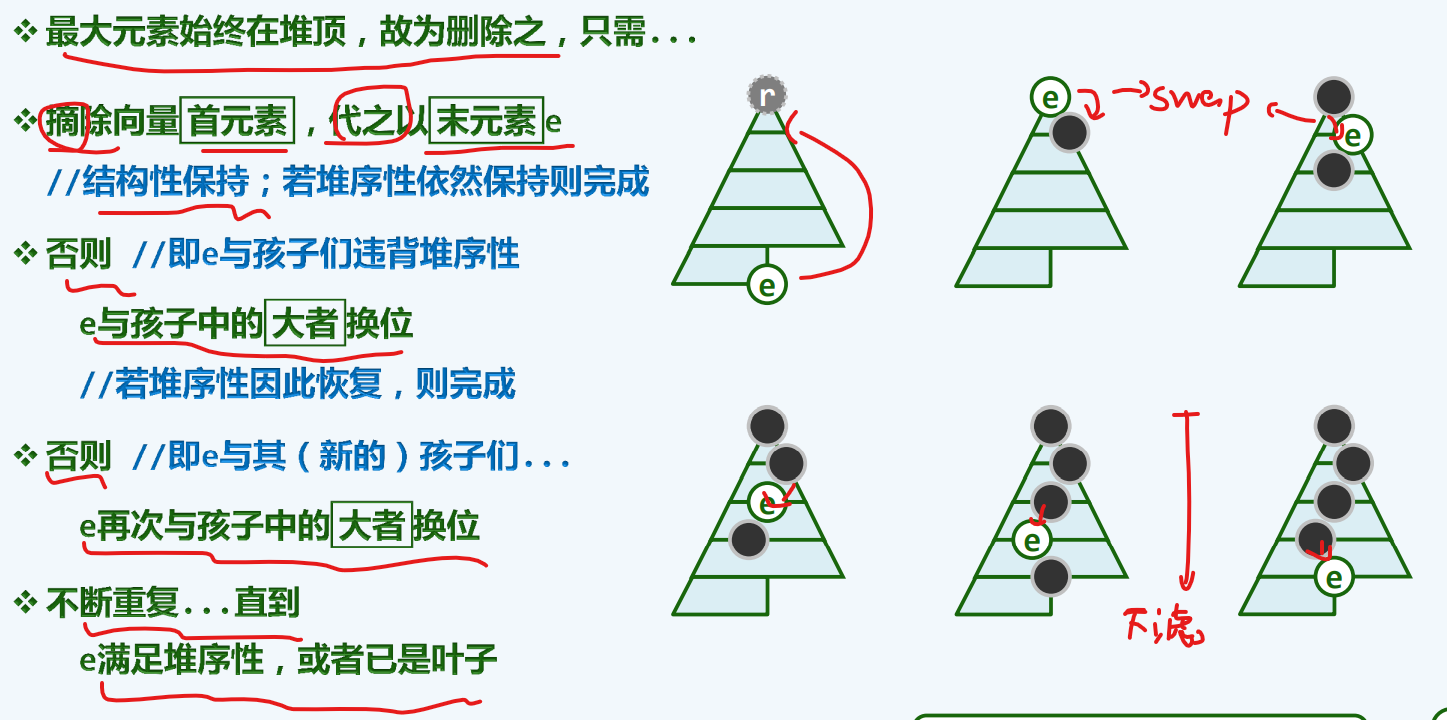
实例
实现
ProertParent()
1
2
3
4
5
6
7
8
9
10
11
12
| #define Parent(i) ( ( ( i ) - 1 ) >> 1 )
0002 #define LChild(i) ( 1 + ( ( i ) << 1 ) )
0003 #define RChild(i) ( ( 1 + ( i ) ) << 1 )
0004 #define InHeap(n, i) ( ( ( -1 ) < ( i ) ) && ( ( i ) < ( n ) ) )
0005 #define LChildValid(n, i) InHeap( n, LChild( i ) )
0006 #define RChildValid(n, i) InHeap( n, RChild( i ) )
0007 #define Bigger(PQ, i, j) ( lt( PQ[i], PQ[j] ) ? j : i )
0008 #define ProperParent(PQ, n, i) \
0009 ( RChildValid(n, i) ? Bigger( PQ, Bigger( PQ, i, LChild(i) ), RChild(i) ) : \
0010 ( LChildValid(n, i) ? Bigger( PQ, i, LChild(i) ) : i \
0011 ) \
0012 )
|
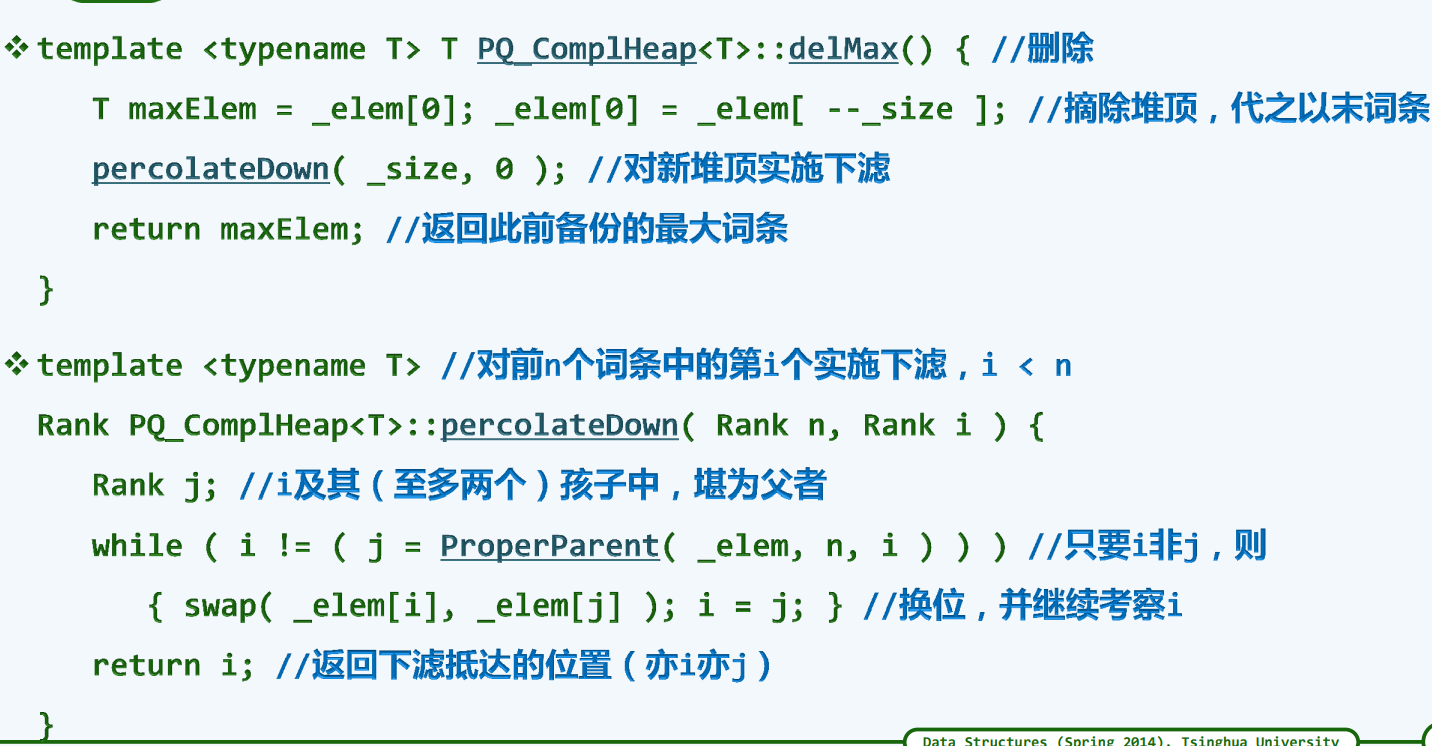
delMax()
1
2
3
4
5
| template <typename T> T PQ_ComplHeap<T>::delMax() {
0002 T maxElem = _elem[0]; _elem[0] = _elem[ --_size ];
0003 percolateDown ( _elem, _size, 0 );
0004 return maxElem;
0005 }
|
percolateDown()
1
2
3
4
5
6
7
|
0002 template <typename T> Rank percolateDown ( T* A, Rank n, Rank i ) {
0003 Rank j;
0004 while ( i != ( j = ProperParent ( A, n, i ) ) )
0005 { swap ( A[i], A[j] ); i = j; }
0006 return i;
0007 }
|
效率
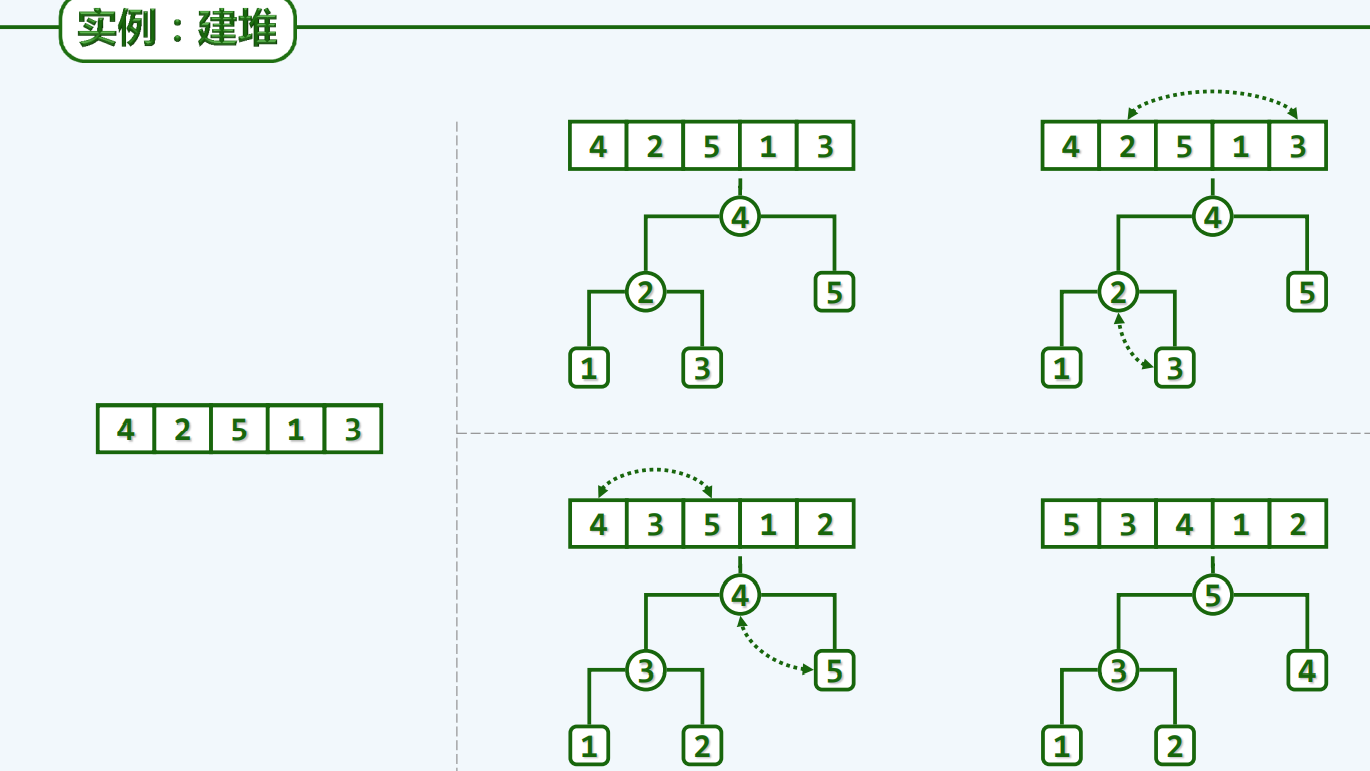
批量造堆
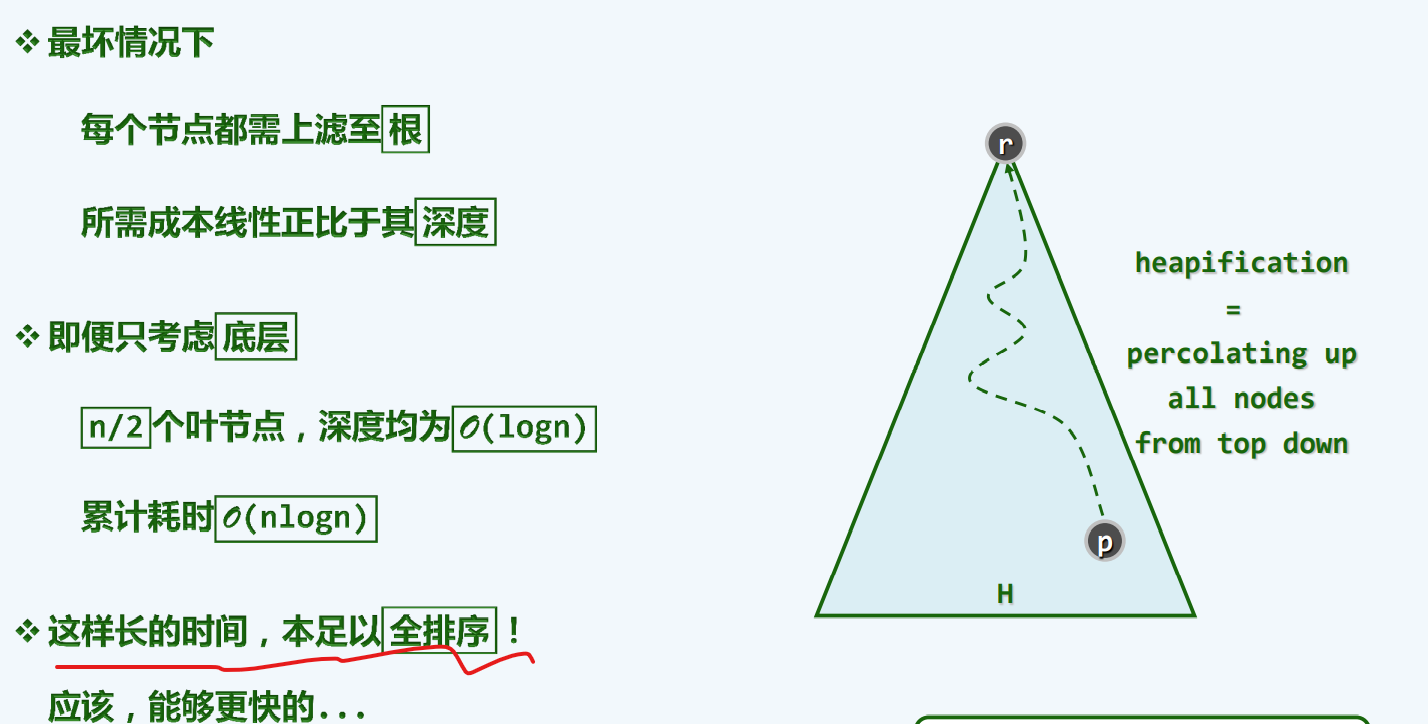
自上而下的上滤
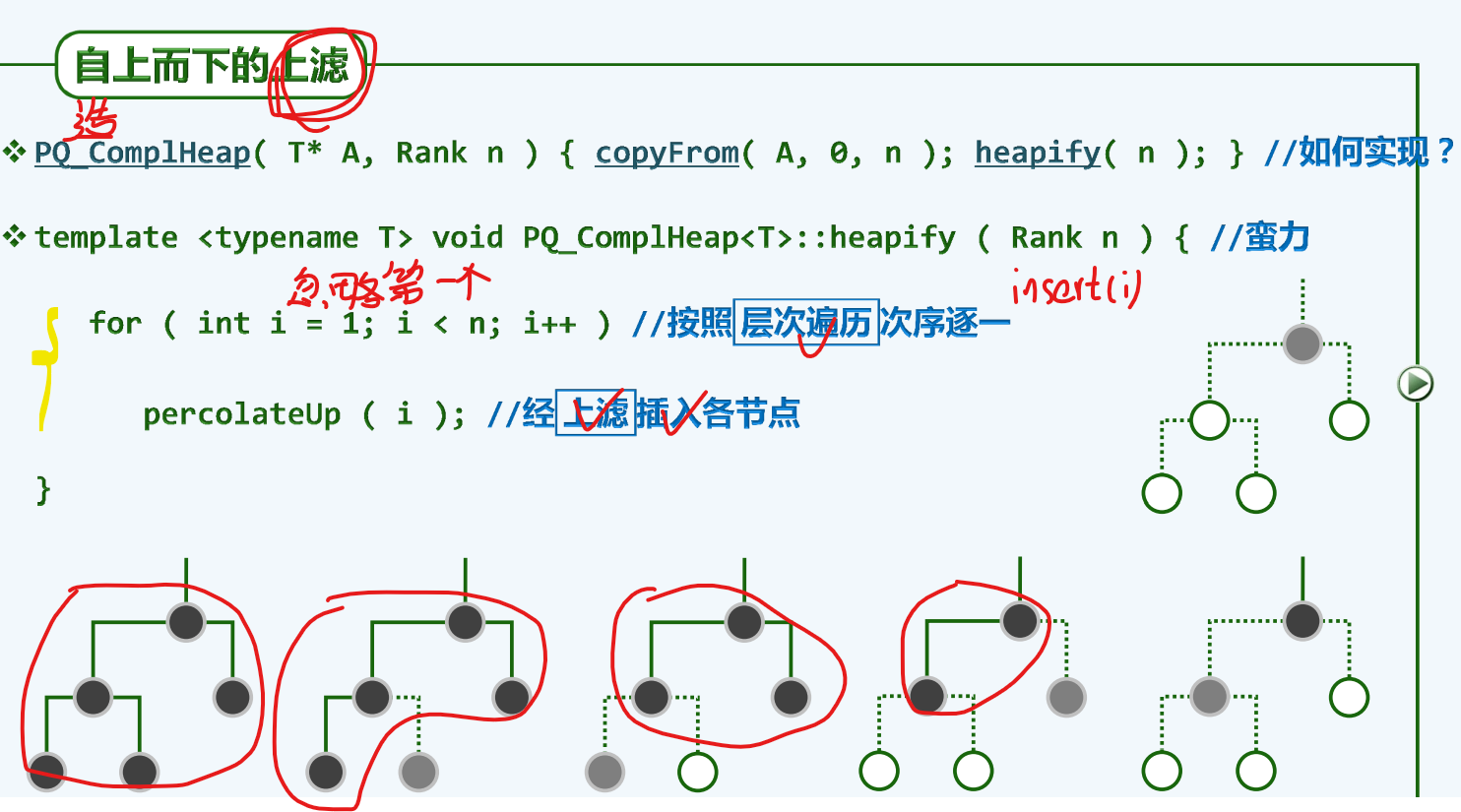
效率
自下而上的下滤
算法
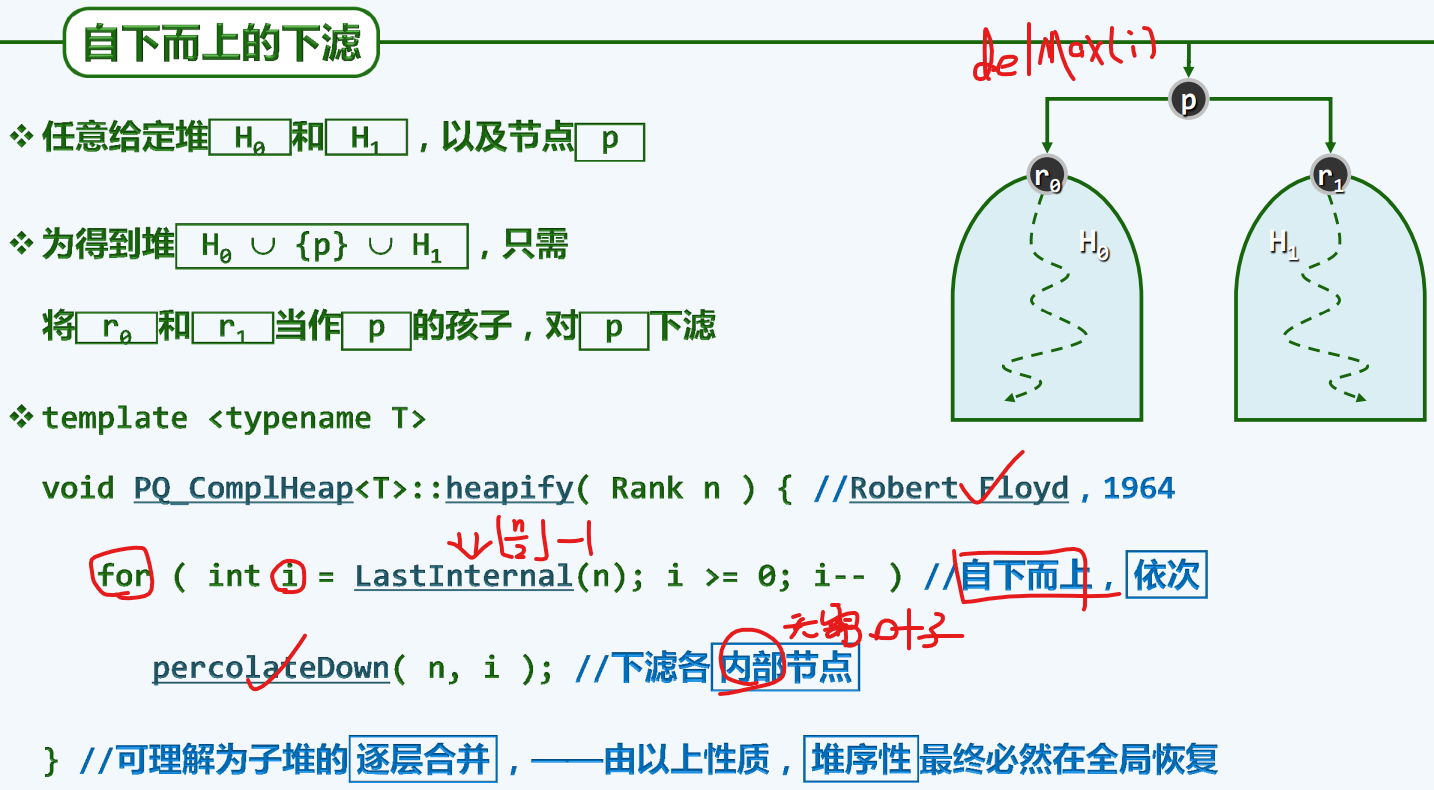
实现
1
2
3
4
| template <typename T> void heapify ( T* A, const Rank n ) {
0002 for ( Rank i = n/2 - 1; 0 <= i; i-- )
0003 percolateDown ( A, n, i );
0004 }
|
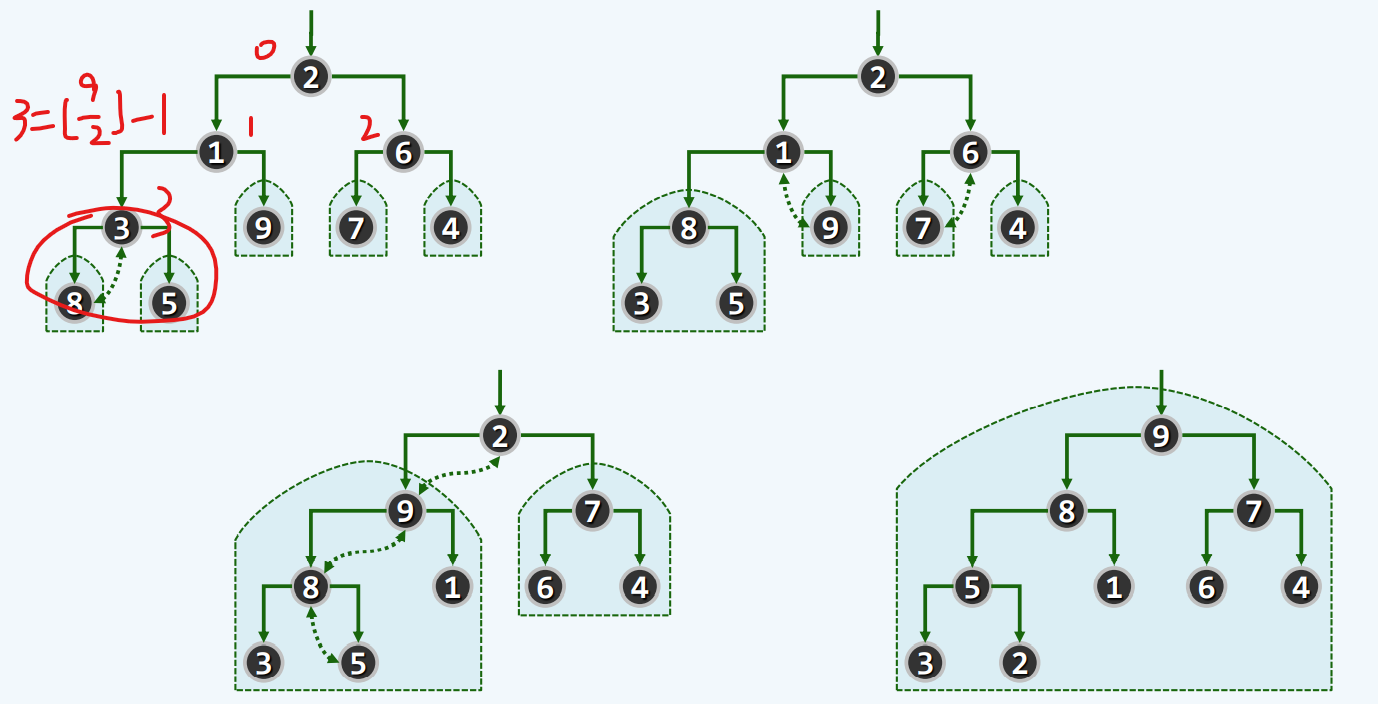
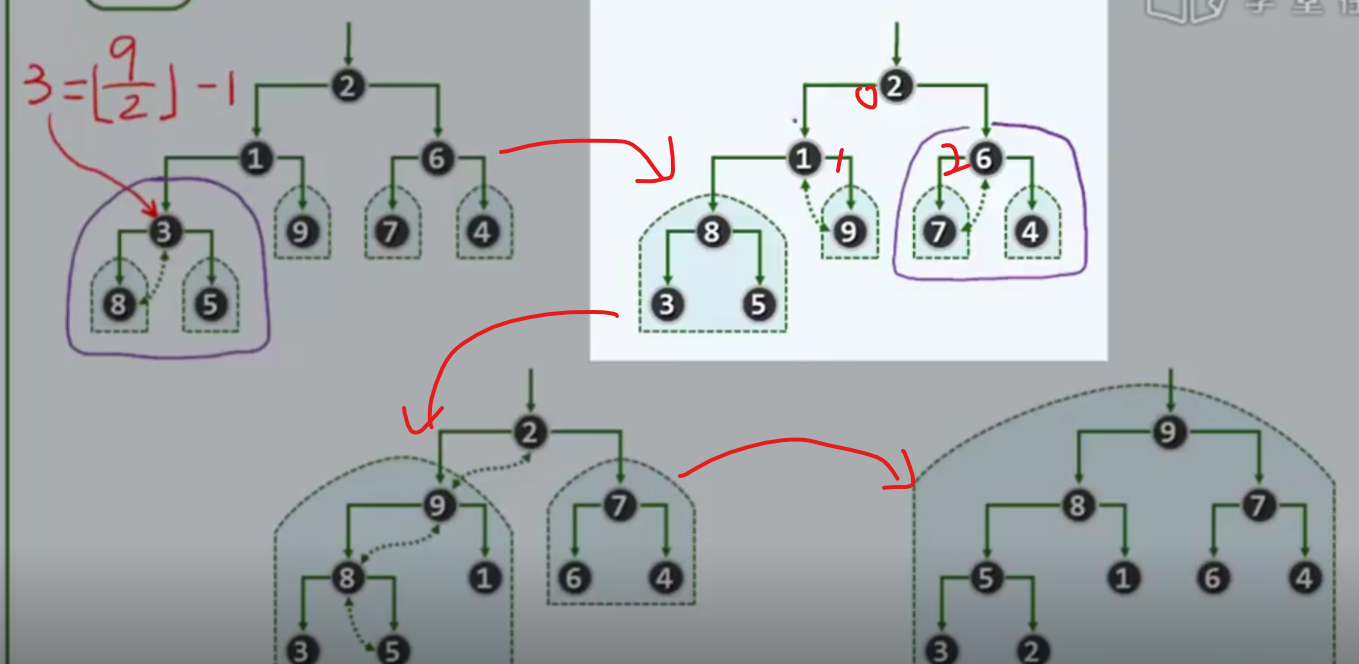
实例
这里数值为3纯属巧合
效率
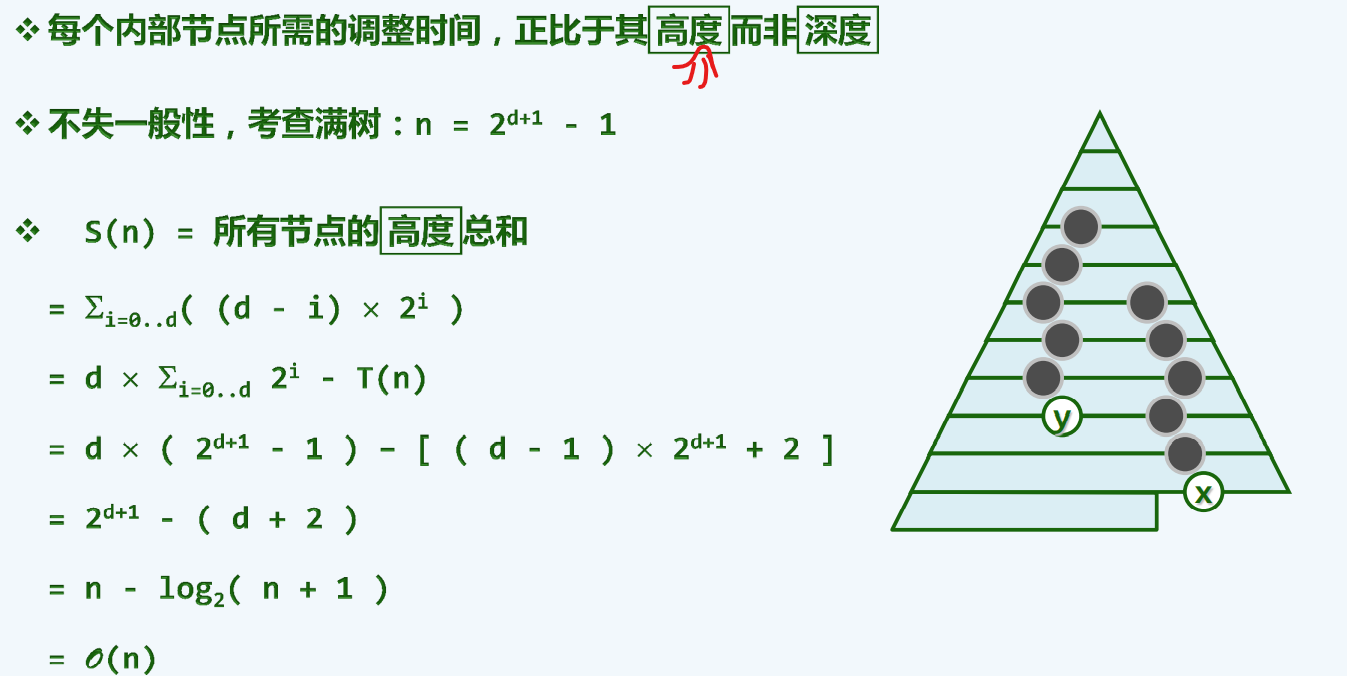
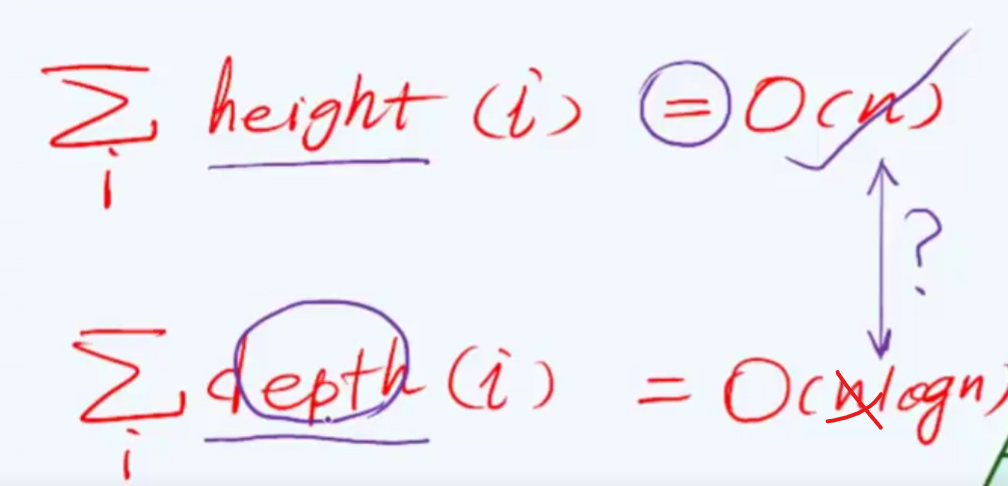
与自上而下相比,自下而上采用的是高度作为指标,得到的时间复杂度为O(h)为何以高度为指标会低这么多时间?,这是因为,高度低的人群为大多数(树的底层),这就像税收,大部分人都属于中低层阶级,因此他们所需要缴纳的税收少,总体阶层全部加起来税收也不过n,这是再合适不过的了,如果自上而下缴纳税收,这反而是迎合的收入高的阶级,使得收入低的人交更多的税,这样必然会受到惩罚。
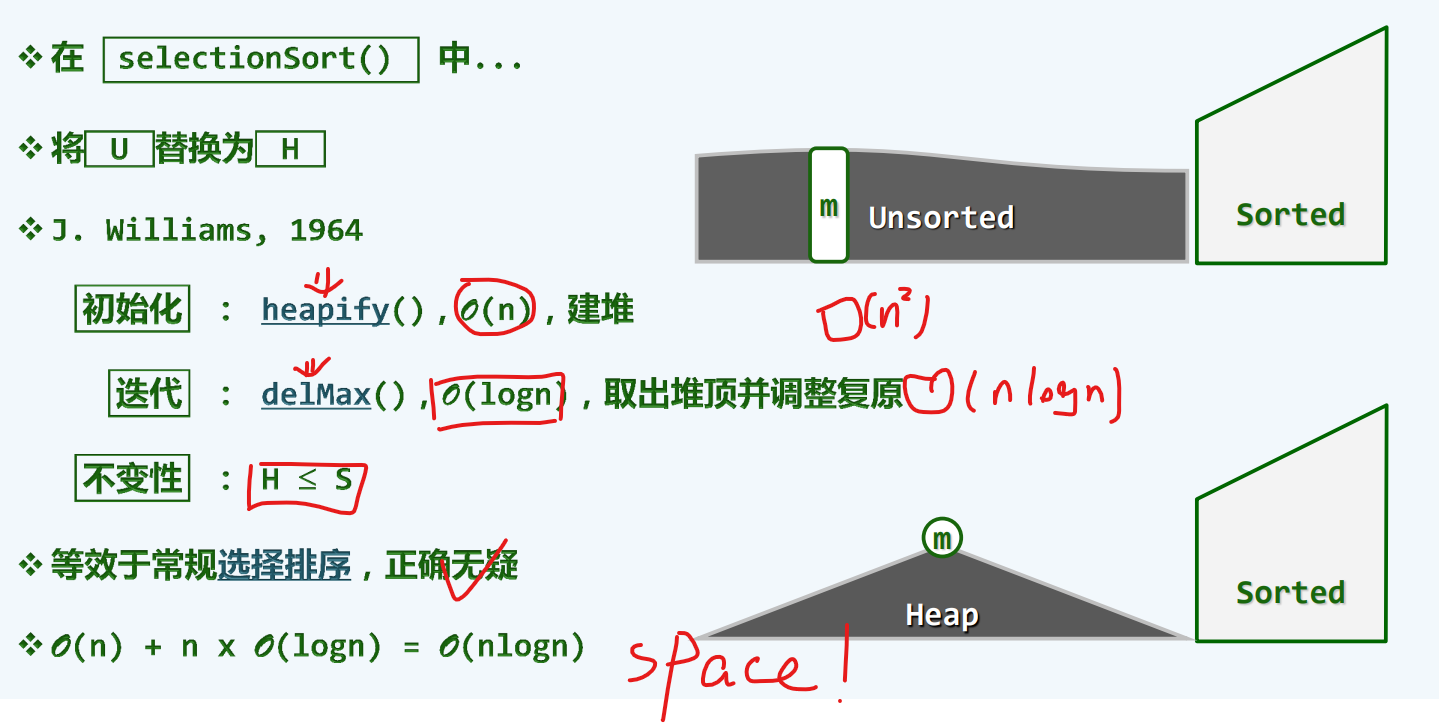
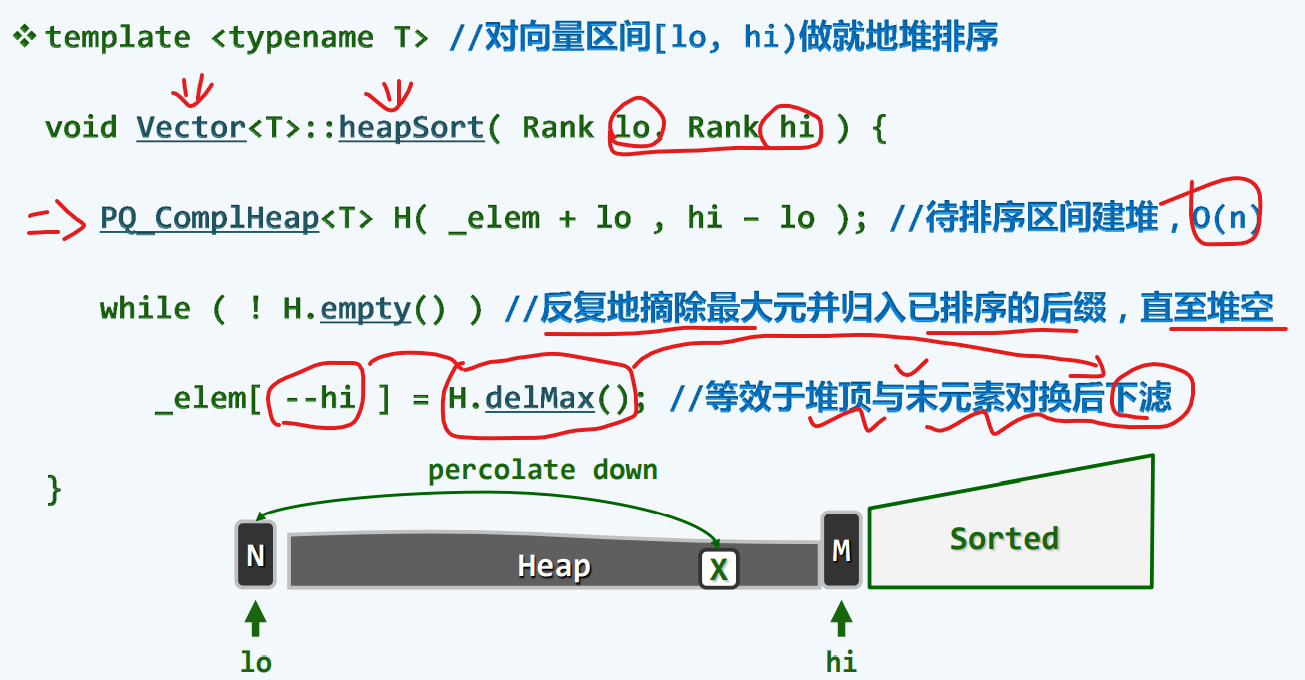
堆排序
算法
就地
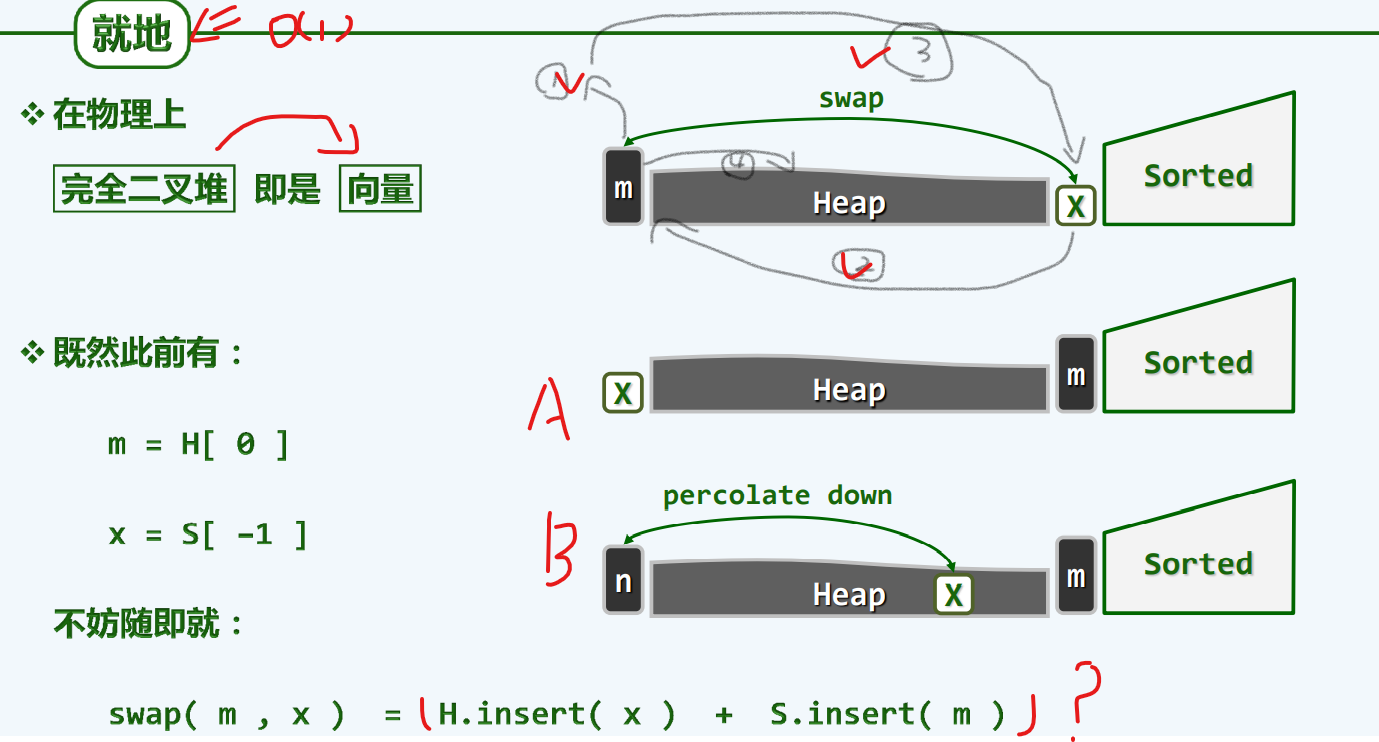
实现
按照我们的惯例,lo对应的是首元素,hi对应的是尾部的哨兵
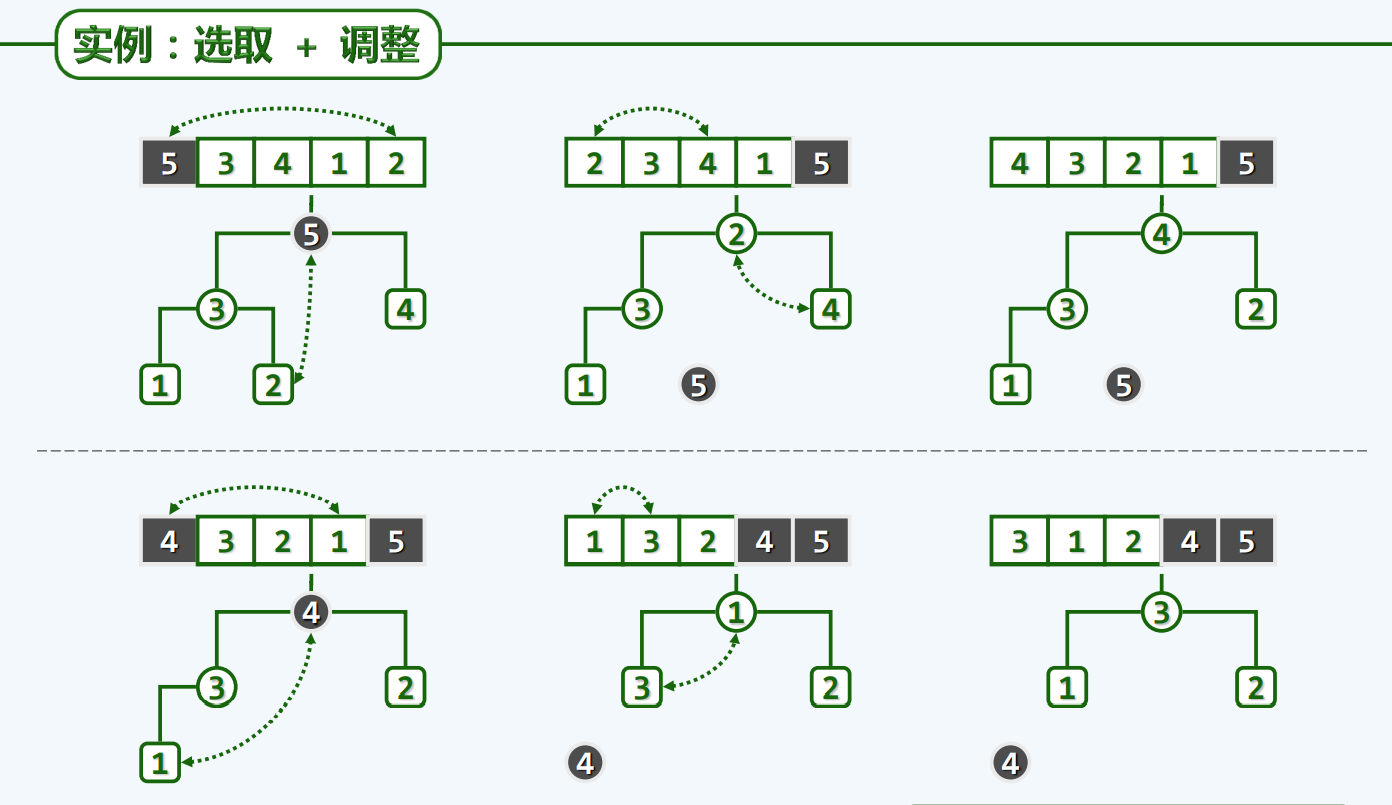
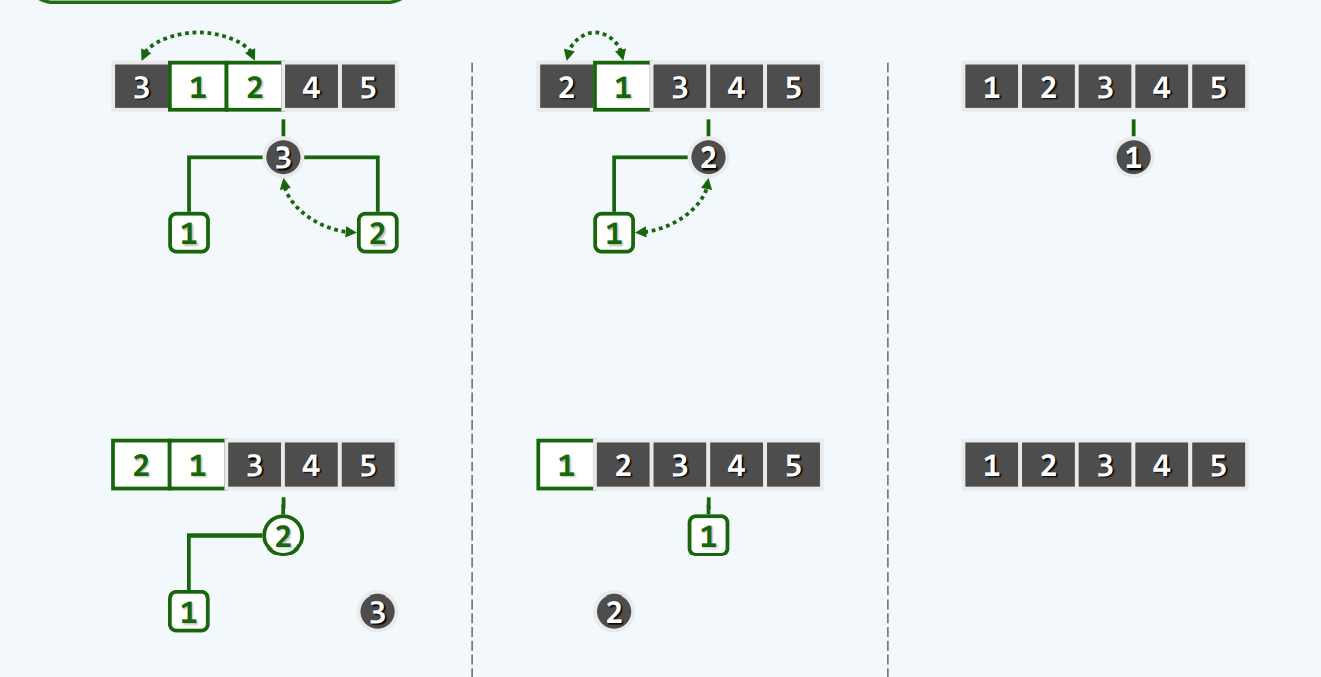
实例
预处理
选取+调整
左式堆
第一印象
堆之合并
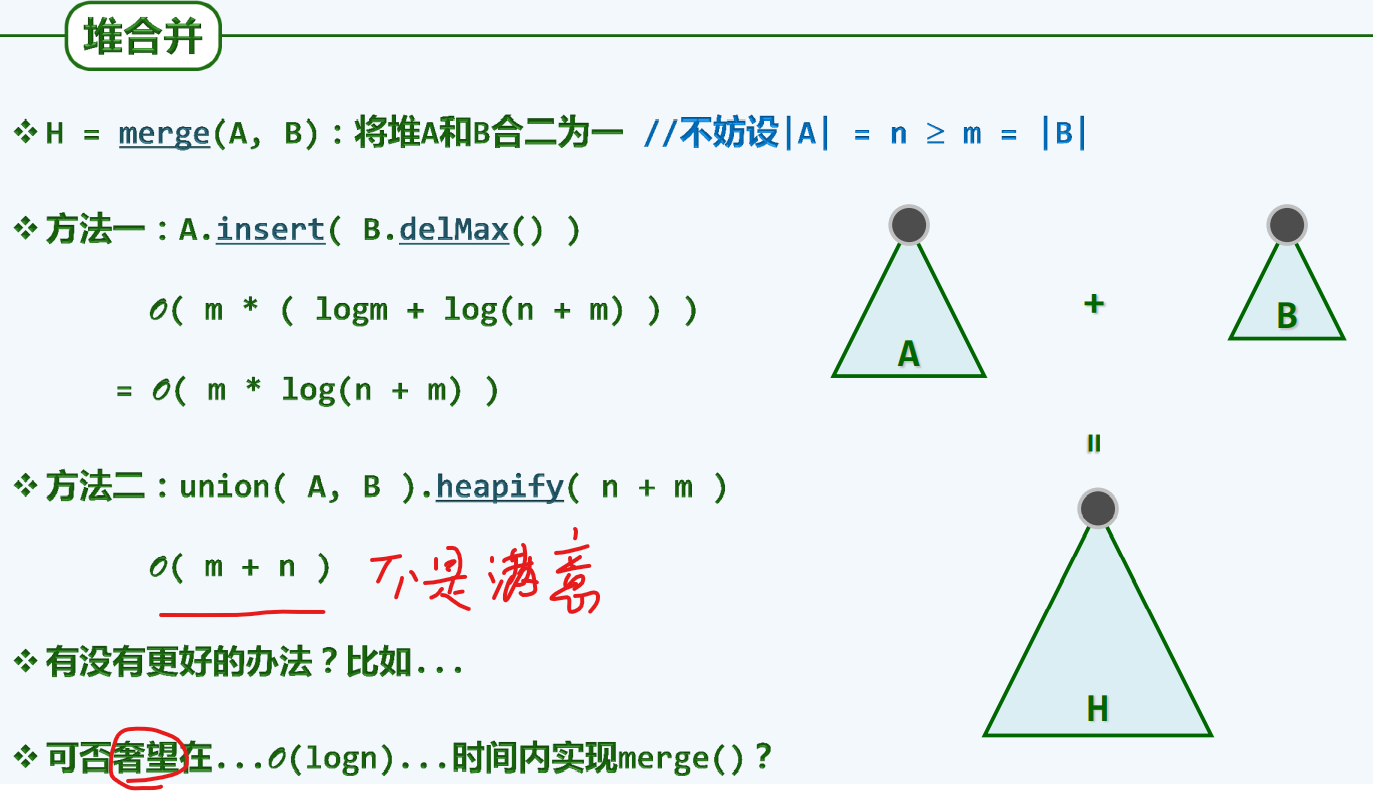
为何我们不满意于O(m+n)的时间复杂度?
事实上弗洛伊德的算法是基于完全无序给出的,我们这已经分好了两堆,而且分别知道了内部偏序关系,从这一角度出发,我们完全有理由相信存在更加高效的算法,事实上,左式堆就是答案。
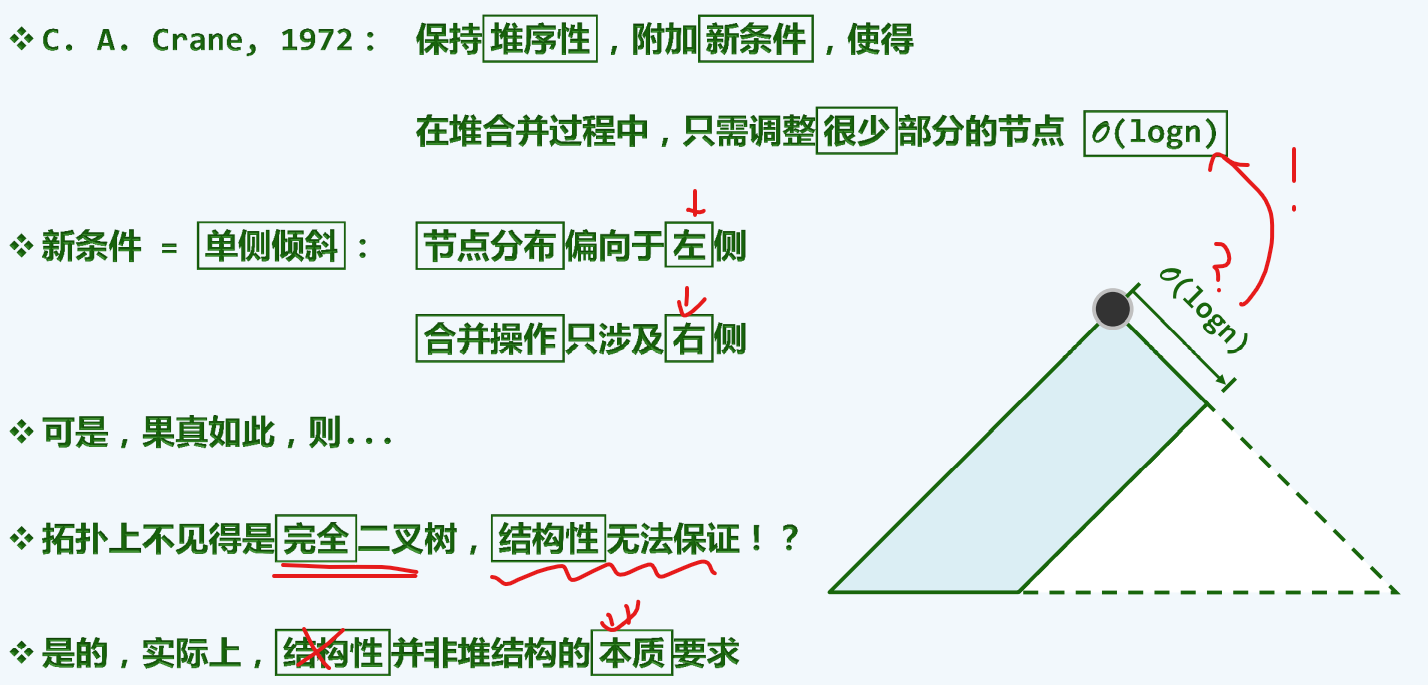
奇中求正
虽然,这种偏向一个方向的左式堆能将时间复杂度降到O(logn),但是,我们仔细观察,这还是一颗严格意义的完全二叉树吗?事实上,我们说,对于堆而言,结构性并不是必要遵守的条件,堆序性才是。在适当的时候,我们完全可以做一些必要的舍弃。
NPL
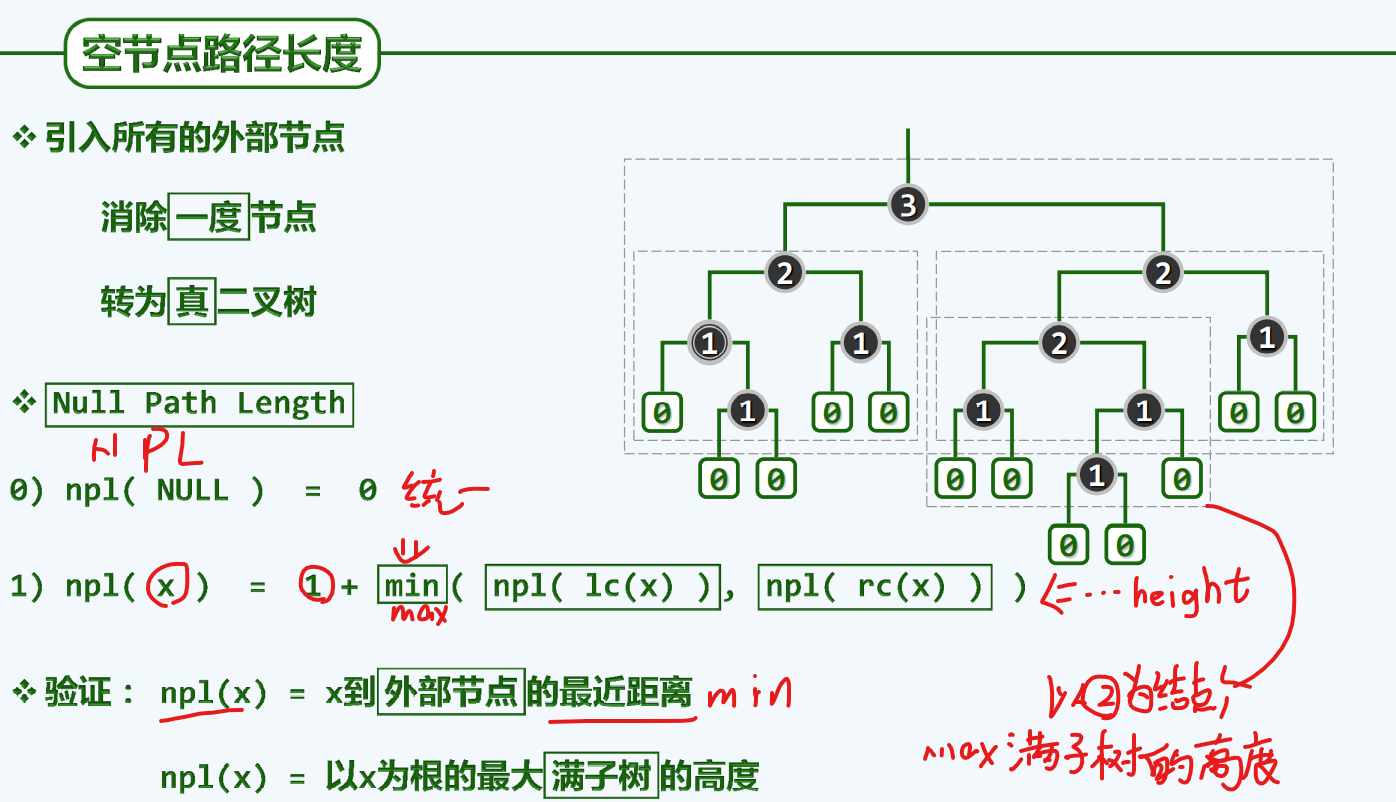
至此,我们建立了一个重要的指标(NPL),以这个指标为基准,我们可以来度量根节点的倾斜性
左倾性
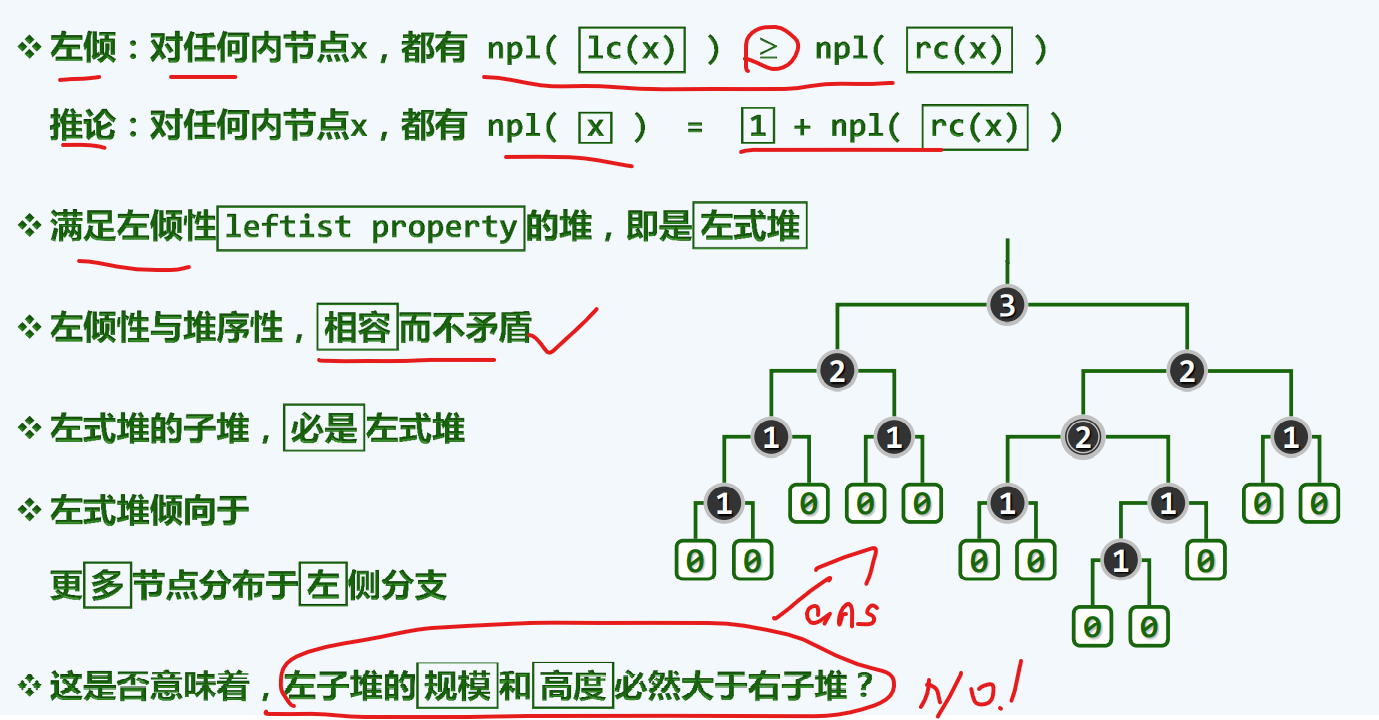
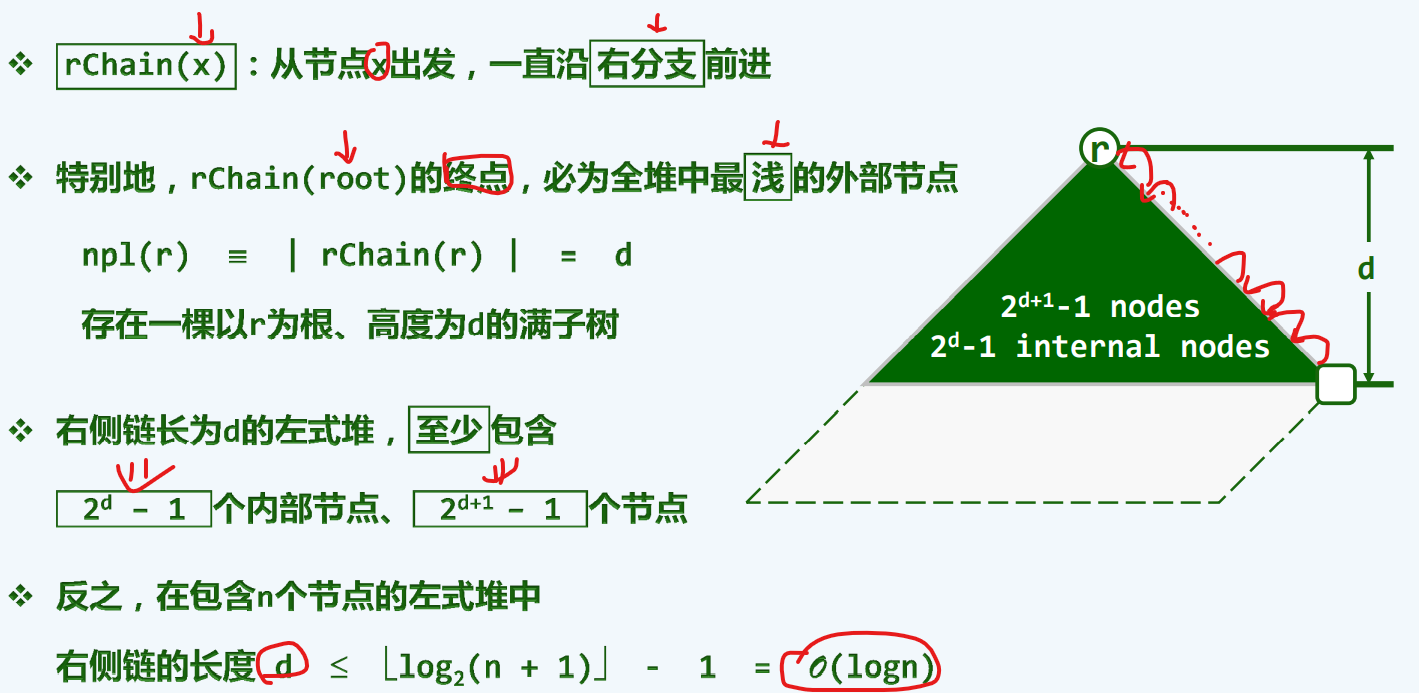
我们说,更重要的是看他的右侧链
左展右敛
如果根节点的NPL为d,那么至少含有2^d个结点
反过来,如果将左式堆的规模固定为n,那么右侧链的长度不过logn
这难道不正是我们最初的设计目标吗
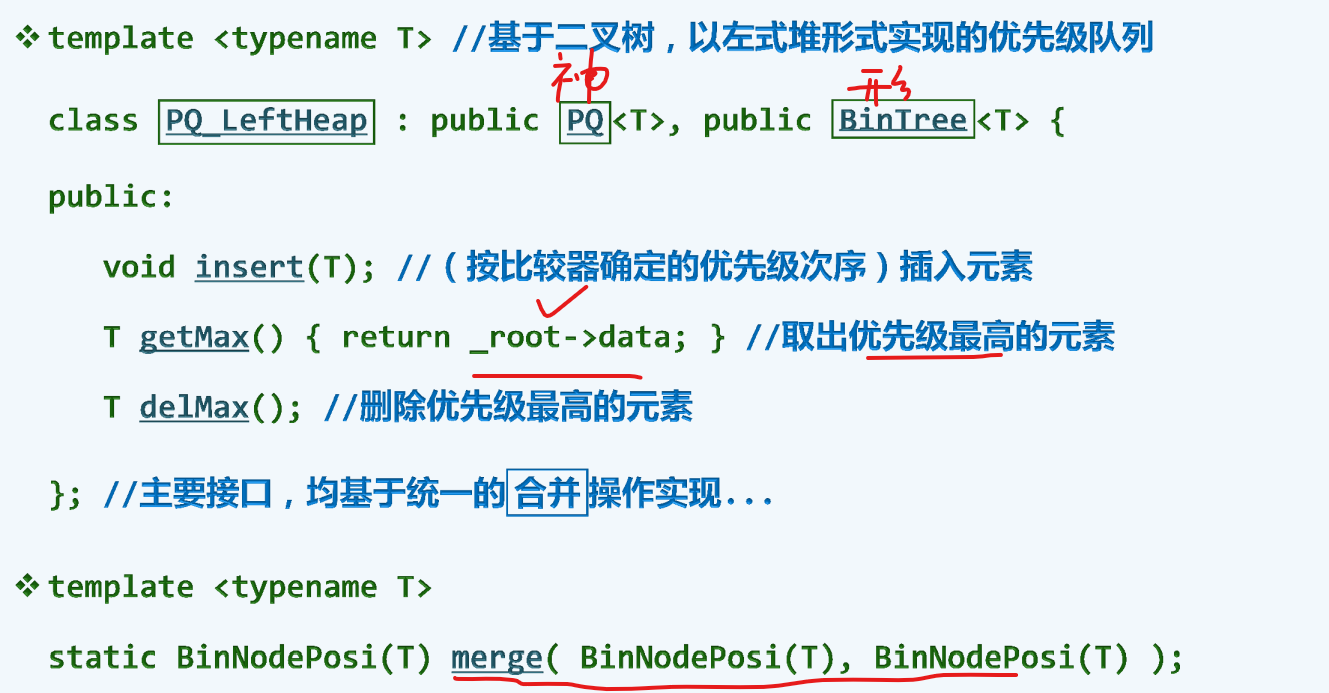
合并算法
LeftHeap
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| #include "PQ/PQ.h"
0002 #include "BinTree/BinTree.h"
0003
0004 template <typename T>
0005 class PQ_LeftHeap : public PQ<T>, public BinTree<T> {
0006 public:
0007 PQ_LeftHeap() { }
0008 PQ_LeftHeap ( T* E, int n )
0009 { for ( int i = 0; i < n; i++ ) insert ( E[i] ); }
0010 PQ_LeftHeap( PQ_LeftHeap & A, PQ_LeftHeap & B ) {
0011 _root = merge(A._root, B._root); _size = A._size + B._size;
0012 A._root = B._root = NULL; A._size = B._size = 0;
0013 }
0014 void insert ( T );
0015 T getMax();
0016 T delMax();
0017 };
|
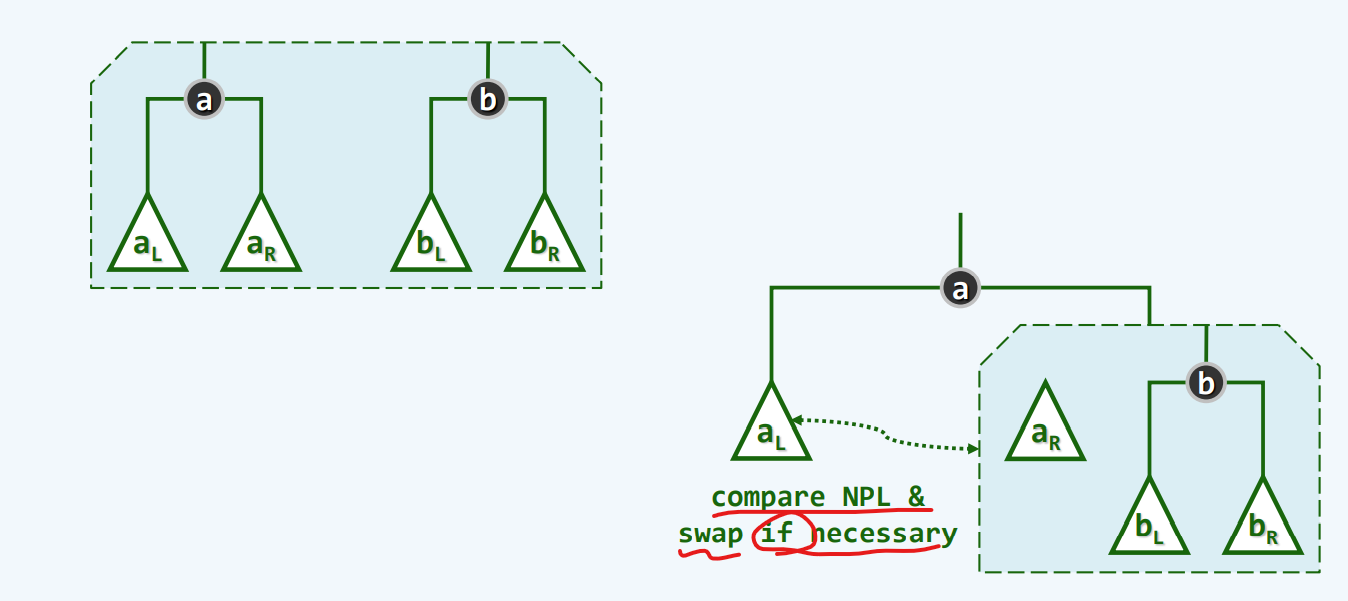
算法讲述
实现
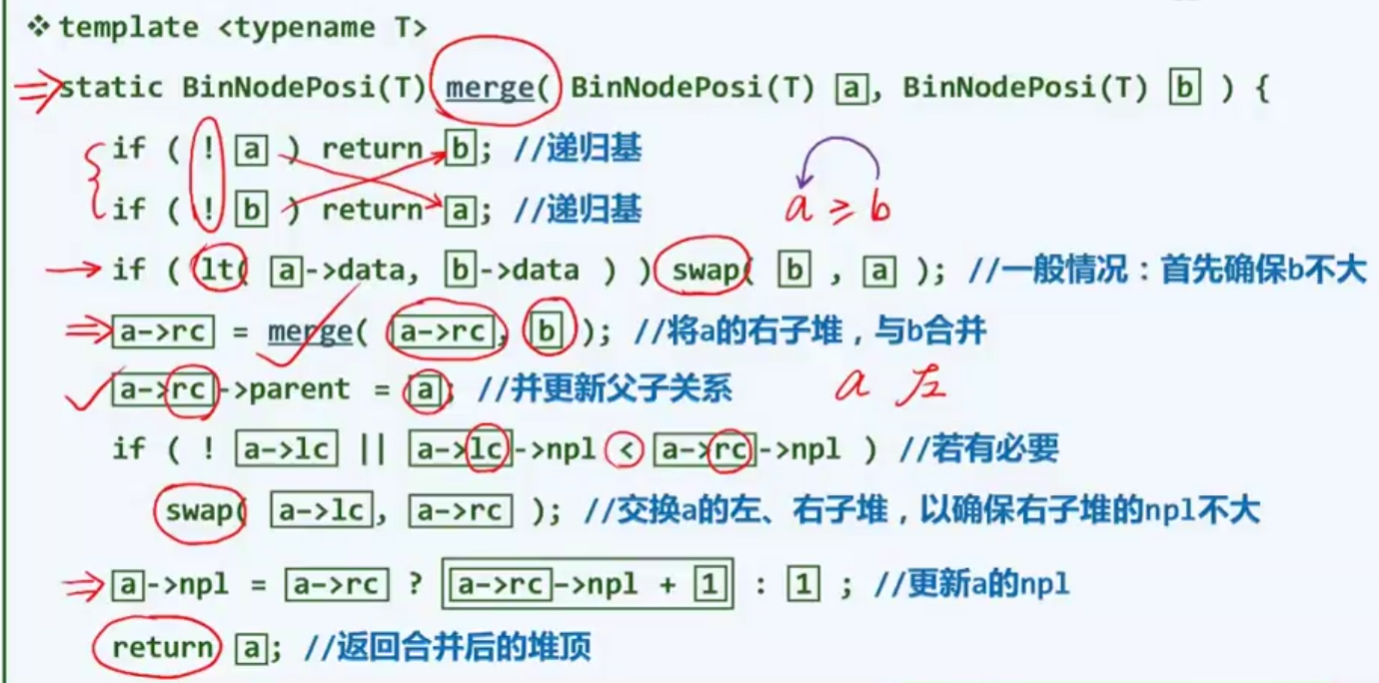
代码
1
2
3
4
5
6
7
8
9
10
11
| template <typename T>
0002 static BinNodePosi<T> merge ( BinNodePosi<T> a, BinNodePosi<T> b ) {
0003 if ( ! a ) return b;
0004 if ( ! b ) return a;
0005 if ( lt ( a->data, b->data ) ) swap ( a, b );
0006 ( a->rc = merge ( a->rc, b ) )->parent = a;
0007 if ( !a->lc || a->lc->npl < a->rc->npl )
0008 swap ( a->lc, a->rc );
0009 a->npl = a->rc ? a->rc->npl + 1 : 1;
0010 return a;
0011 }
|
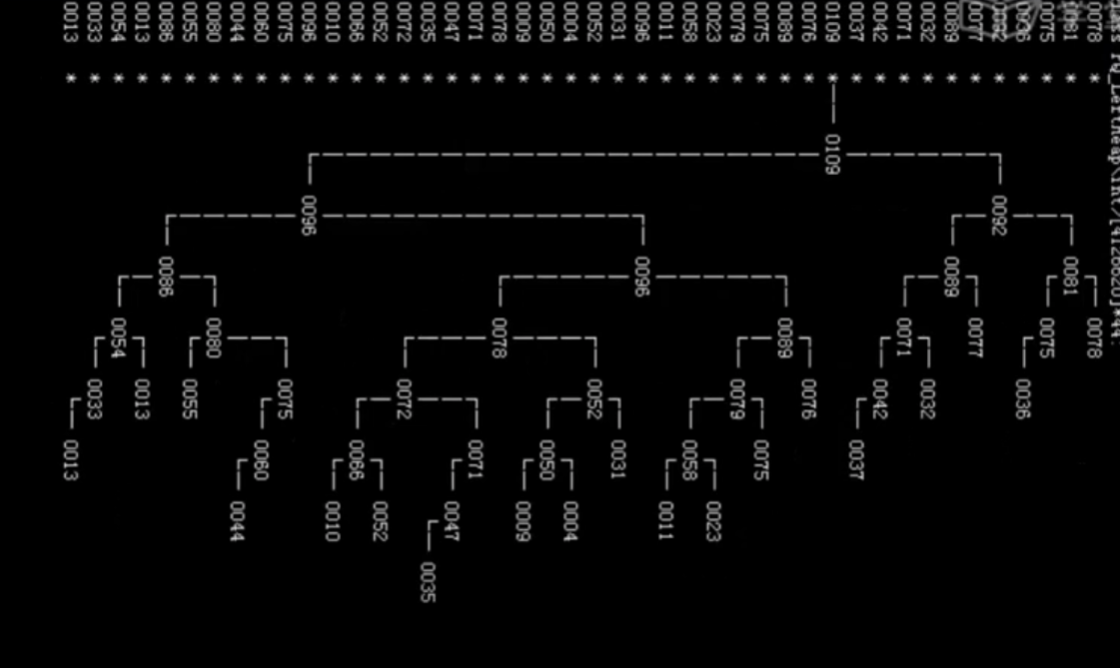
实例
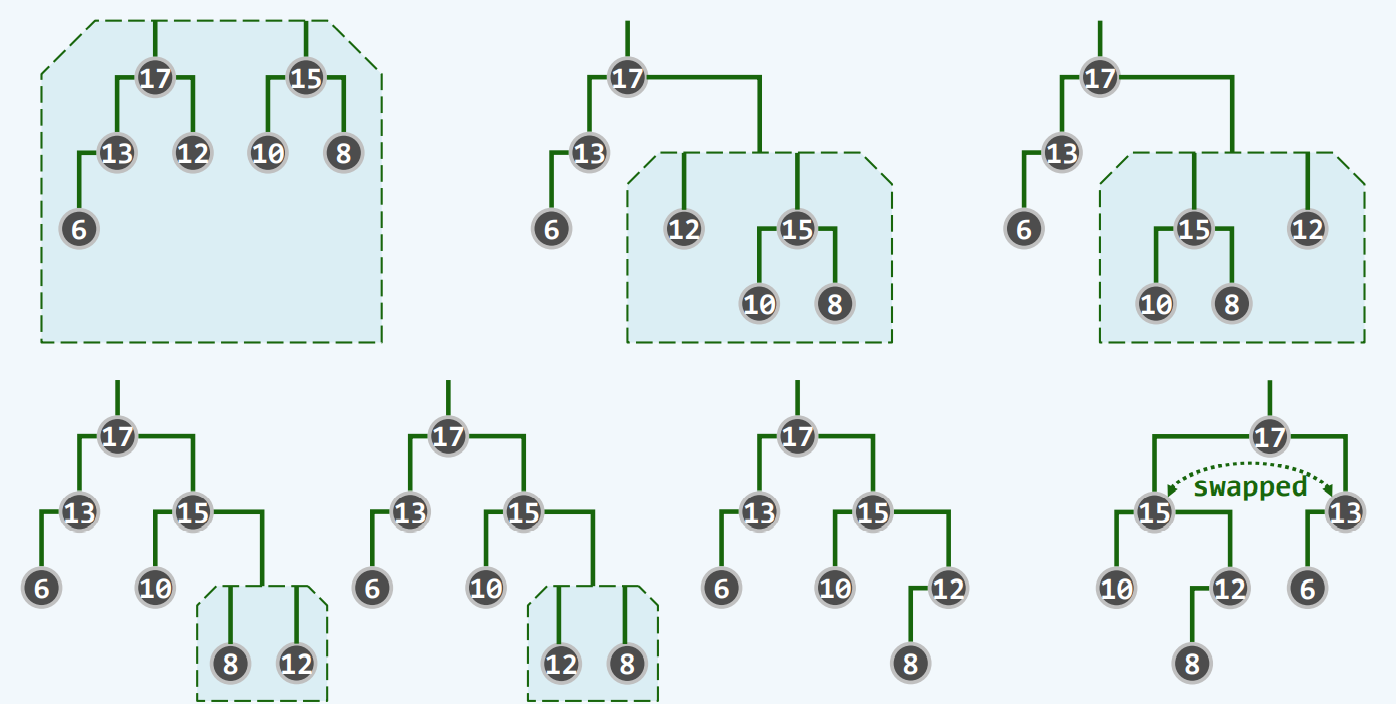
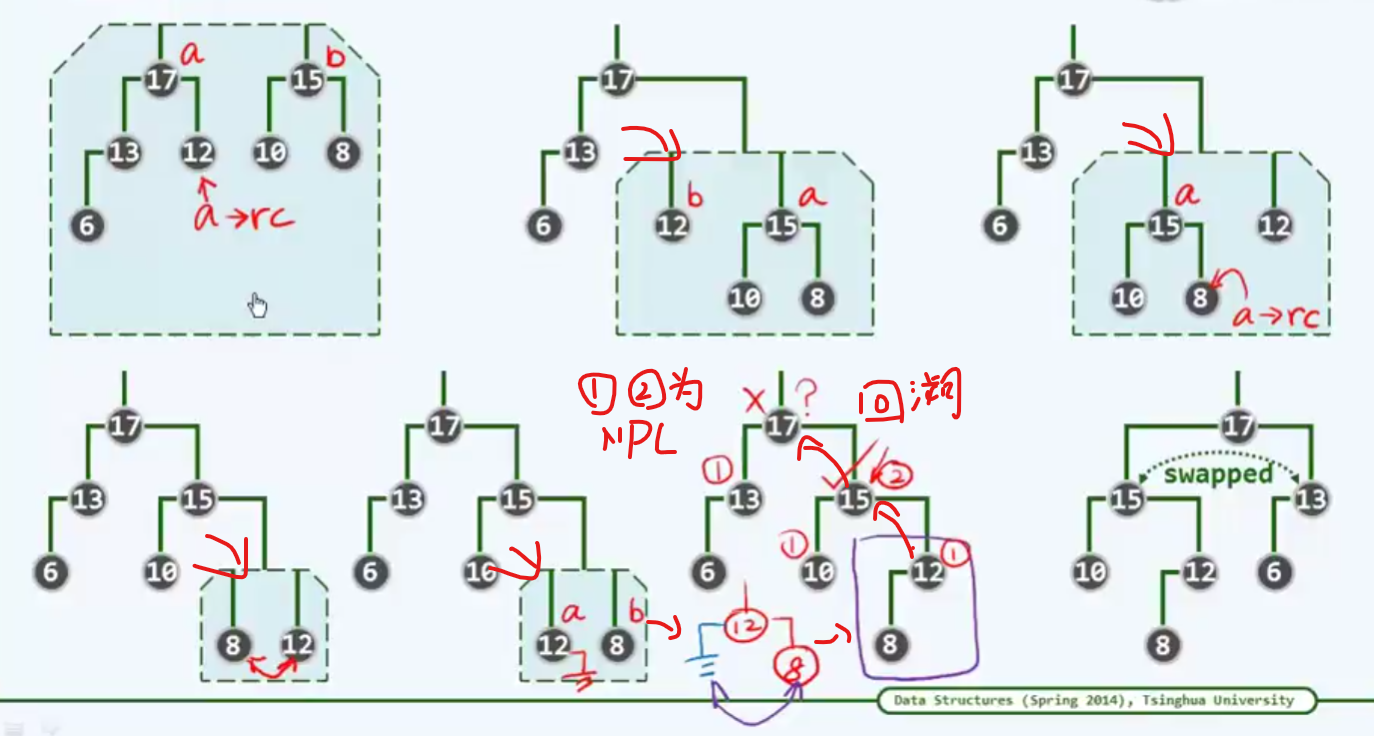
整个过程围绕右侧链展开,我们说过,他的右侧链,不会超过O(logN)我们说,这个结果再好不过了
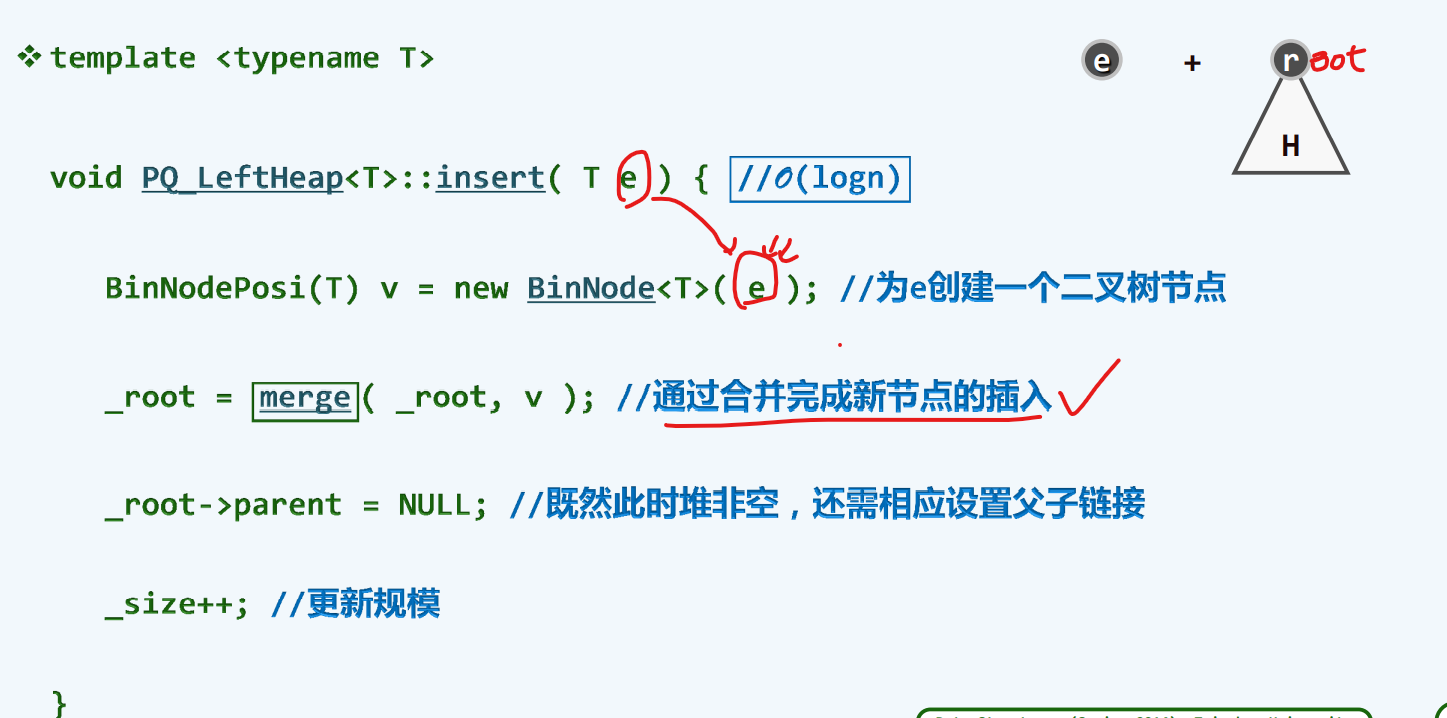
插入+删除
插入即是合并
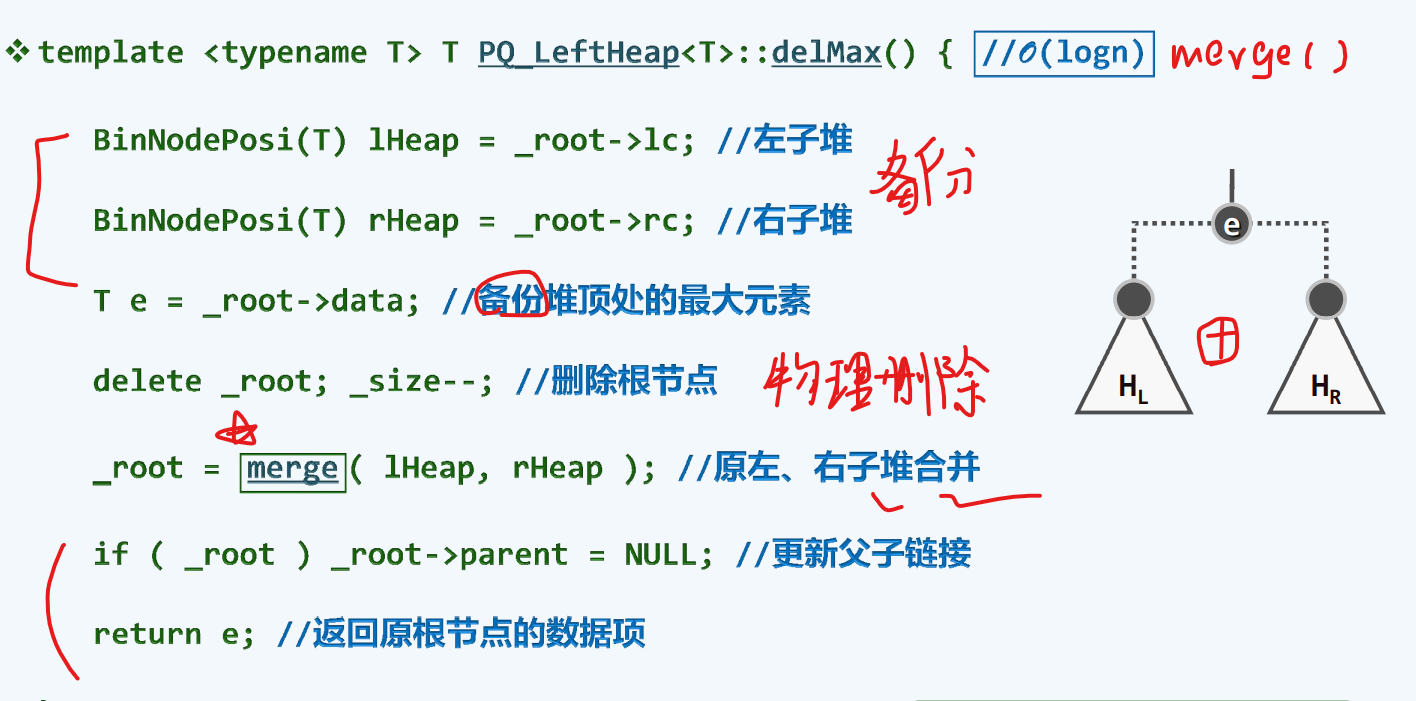
删除亦是合并

 微信
微信 支付宝
支付宝